GeoslamZeb-Horizon移动式扫描仪在城市竣工测量中的应用
2022-05-09刘学思
刘学思
(重庆市勘测院,重庆 401121)
1 引 言
竣工测量是建设项目规划验收的必要环节,传统的测量方法主要采用GNSS-RTK、全站仪、测距仪的方式进行外业数据采集。该方法存在作业时间长、数据信息单一、无法对狭小区域进行测量等缺点。近年来,随着三维激光扫描技术的不断发展,其在竣工测量中的应用也得到了广泛关注[1~5]。本文以工程实例的方式,介绍GeoslamZeb-Horizon移动式三维激光扫描仪(以下简称:Zeb-Horizon扫描仪)在城市竣工测量的技术方法和作业流程,并与传统测量方式就作业效率、成果精度等进行对比分析。
2 Zeb-Horizon扫描仪
2.1 Zeb-Horizon简介
Zeb-Horizon是一款基于SLAM技术的移动式三维激光扫描仪,其提供了一种高效和简单的方法来获取三维点云数据。数据的获取是通过边走边扫的方式,就同一区域而言其相对于传统地面扫描方法所用时间更少。其基本性能参数如表1所示。

Zeb-Horizon基本参数 表1
2.2 Zeb-Horizon基本原理
Zeb-Horizon是由一个2D脉冲式激光测距仪和安装在驱动电机上的惯性测量单元(IMU)组合而成。扫描镜头在驱动电机上的运动为生成3D信息提供了所需的第三维度。利用SLAM(Simultaneous Localization And Mapping)算法将2D点云数据与IMU数据结合生成精确的3D点云数据。Zeb-Horizon将获取原始的激光测距信息和惯导数据储存在数据记录器中,然后内业利用SLAM算法将原始数据转换成点云数据,数据的处理要都在GeoSLAM Hub软件中进行。Zeb-Horizon移动式扫描仪主要是利用点云特征和惯导数据,因此在测量过程中速度(建议正常步行速度)不宜过快,单个扫描回路时间(建议不超过 30 min)不宜过长。
2.3 Zeb-Horizon作业流程
Zeb-Horizon移动式扫描仪进行扫描作业流程包括现场踏勘及路径规划(为保证测量精度尽量形成一个闭合路线)、建立测量控制网、初始化仪器并按规划路径进行数据采集、利用GeoSLAM Hub软件进行数据处理、最终利用点云数据进行绘图等,如图1所示。
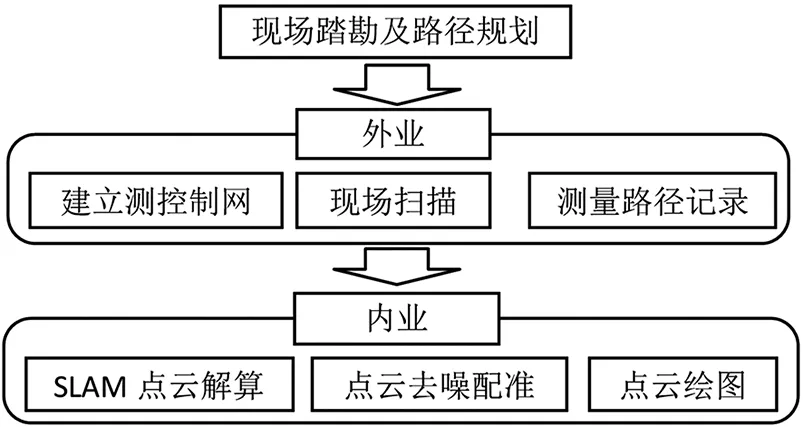
图1 Zeb-Horizon作业流程
3 Zeb-Horizon应用实例
3.1 工程概况
本文以某厂区的规划核实竣工测量为例,利用Zeb-Horizon对竣工范围进行数据采集。本次测量主要是两个厂房,建筑占地面积约为 5 500 m2,厂区占地面积约 40 000 m2。

图2 厂区现状
3.2 外业采集
(1)控制网布设。扫描作业开始前需利用GNSS-RTK在测量范围均匀布置几个控制点,以便于内业点云处理时进行地理坐标配准。
(2)路径规划。由于Zeb-Horizon特殊测量模式(移动式扫描,尽可能形成一个闭合环路),因此首先要规划一下移动扫描路径尽可能以较短的时间扫完整个感兴趣区域。厂区的扫描路径如图3所示。
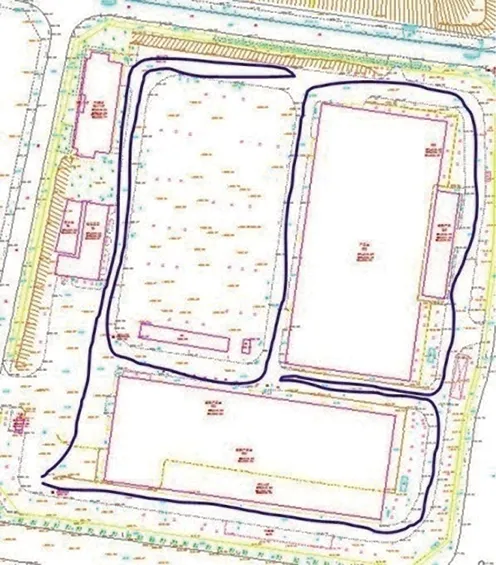
图3 移动扫描路径
(3)启动扫描。开始扫描时,需将Zeb-Horizon扫描激光头放置在平稳的平面上,然后开机进行初始化,初始化完成后,即可按照图3的扫描路径从左下角开始按逆时针方向扫描整个厂区,最后又回到左下角的位置,至此扫描结束。
3.3 内业处理
(1)GeoSLAM Hub软件解算。从数据记录器中下载的原始数据必须经过GeoSLAM Hub软件的解算才能成为正确的点云数据。本次扫描时间约 20 min,获取的原始数据约 1.01 G,最终通过GeoSLAM Hub软件解算去噪,导出后的点云数据约 612 M(laz格式)。
(2)地理坐标配准。将导出laz点云数据加载到Trimble RealWorks软件中进行点云地理坐标系转换,最总转换到与规划核实相统一的坐标系下,如图4所示。

图4 坐标配准
(3)成果制作。将配准后的点云数据加载到清华山维EPS三维测图软件中进行地形图绘制[6,7],如图5所示。点云数据除了能够绘制竣工地形图外,也可用来绘制立面图,提取各类地物位置和高度信息等。

图5 EPS三维绘图
4 成果展示及讨论
4.1 成果展示
根据上述步骤完成内、外业作业,可以获取该厂区的竣工地形图及厂房立面图等,如图6所示。

图6 成果展示
4.2 讨论
为进一步更加直观的分析Zeb-Horizon扫描仪的数据精度及作业效率,采用传统全站仪的作业模式对该项目进行竣工测量,最终分析对比不同作业方式获取的成果数据。
(1)精度对比
选取两个厂房的12个特征拐点进行平面精度比较,同时随机选取12个井盖高程进行高程精度对比,坐标差值及高程差值分别如表2、表3所示。由表2、表3可以得出Zeb-Horizon获取的点云数据平面中误差约为 3.9 cm、高程中误差约 3.0 cm,均满足《城市测量规范》(CJJ/T8-2011)中竣工测量的精度要求[8]。

Zeb-Horizon与全站仪平面精度对比 表2

Zeb-Horizon与全站仪高程精度对比 表3
(2)效率分析
在已有控制点的情况下,与传统全站仪测量模式相比,Zeb-Horizon扫描仪外业扫描用时约为 20 min,外业时间明显缩短;内业数据处理经过点云计算、三维绘图等步骤,在此相对传统模式无明显优势。但就数据信息量而言,点云数据几乎完全复制了项目范围的所有三维信息,通过点云数据能够获得很多传统测量模式所不能获取的成果数据(如立面图等)。
5 结 论
利用Zeb-Horizon扫描仪进行建筑竣工测量,外业数据采集自动化高、效率快,在外业作业效率上有很大程度的提高;三维点云数据提供了竣工现场的所有可见的三围信息,在信息量上也有明显优势;最终的项目成果也满足精度要求。相信随着社会的进步和科学的发展,移动式扫描仪的应用前景将会越来越广。
