纤维/纱线柔性电阻式应变传感器的研究进展*
2022-05-09邢任权庄旭品程博闻
邢任权 闫 静 杨 光 庄旭品 程博闻
天津工业大学纺织科学与工程学院,天津 300387
随着物联网和智能可穿戴技术的快速发展,智能设备不断向小型化、柔性化和便携化方向转变。当前,将智能设备与传统服装相结合的智能纺织品正在快速发展,其可广泛应用于人体运动检测[1-2]、智能假肢[3-5]、个人医疗保健[6-8]等领域。智能纺织品的感知功能主要来自于柔性传感器,其中柔性应变传感器是将物理形变转变为可测量电信号的一种设备。相较于传统的刚性应变传感器,柔性应变传感器可以在拉伸、弯曲和扭转等条件下工作,能实时追踪人体运动信息,并将信息传输到集成的中央处理单元,因此被广泛应用于智能可穿戴设备中。
纺织品作为人类生活的必需品,具备柔韧、透气、结构可控和可工业化生产等特点,是柔性传感器理想的传感材料/支撑物[9]。纺织品根据形式可分为纤维、纱线和织物等。相较于织物基柔性应变传感器,纤维/纱线柔性应变传感器因具有可编织、弹性高、适应性广等独特优点而成为了纺织品柔性应变传感器的研究热点。从传感机理来说,纤维/纱线柔性应变传感器可以分为电阻式、电容式、压电式等[10]。其中,纤维/纱线柔性电阻式应变传感器具有制造简便、传感信号易读取、性能可调节等特点,因此常用于智能可穿戴领域。有研究表明,纤维/纱线柔性应变传感器可以直接应用于监测人体健康,以及从小应变(如面部表情、呼吸、咳嗽、发声和脉搏等)到大应变(如肢体运动等)的各种运动[11],[12]7365-7371。基于此,本文主要从纤维/纱线柔性电阻式应变传感器的传感机理、性能参数、制备方法,以及其在智能可穿戴领域的应用四方面进行综述,指出其未来的发展方向,旨在为智能可穿戴设备的开发提供参考。
1 传感机理
纤维/纱线柔性电阻式应变传感器因制备过程简便、检测范围较大和信号读取容易等特点而得到了广泛的关注和研究。电阻式应变传感器对形变的响应方式是,应变发生后,导电材料的微观结构发生变化,进而引发传感器的电阻发生变化[13]。按照微观结构变化的不同,纤维/纱线柔性电阻式应变传感器的传感机理可以分为三类:导电层中裂纹的形成、导电网络的变化和导电材料的几何变形等[14-15]。
1.1 导电层中裂纹的形成
当纤维/纱线柔性电阻式应变传感器的传感材料是以涂层的形式涂覆在纤维/纱线表面时,导电涂层会在传感器变形的过程中因弹性基材和导电涂层之间的力学性能不匹配而产生裂纹,导致电阻增加,从而产生传感现象[16]。例如,有着聚吡咯涂层的莱卡纤维应变传感器发生形变后,聚吡咯涂层产生了垂直于拉伸方向的微裂纹,并且随着形变的增加,裂纹的数量、宽度和长度都在增加,进而引发了更大的电阻变化[17]。
1.2 导电网络的变化
通过湿法纺丝或熔融纺丝的方法将导电材料混入聚合物纤维中制备的纤维柔性电阻式应变传感器,其传感机理可以用拉伸时导电材料构筑的传导网络的变化来解释。当导电材料和弹性材料混合在一起时,根据渗流理论,绝缘主体中建立导电路径只需要少量的导电填料。故拉伸时,导电填料与主体之间较弱的相互作用会导致导电路径断开,材料电阻增加,从而产生传感效应。如Tang等[18]6624-6635将碳纳米管(CNTs)与有机硅氧烷弹性体混合制备的纤维柔性传感器,在拉伸过程中,相邻的CNTs之间的间隙会随着拉伸而增加,导致传感器电阻随之增加。
1.3 导电材料的几何变形
某些弹性较差的导电纤维(如CNTs纤维等),通过特殊的结构设计可以赋予其弹性,从而用于应变传感监测中。当导电纤维/纱线受到拉伸时,其横向的形状会按照泊松比发生变化。纤维/纱线柔性电阻式应变传感器在拉伸过程中,纤维/纱线的长度(L)和横截面积(A)的变化会导致电阻(R)的变化,其变化规律如式(1)所示:
(1)
其中,电阻率(ρ)在所有拉伸条件下均保持恒定。
这种几何变形是控制纤维/纱线柔性电阻式应变传感器应变传感特性的关键。如,造成碳纤维传感器电阻响应变化的主要原因是拉伸过程中纤维长度变长,直径变小[19]。某些特殊结构的纤维/纱线柔性电阻式应变传感器也受几何变形的影响,如盘绕结构的CNTs纤维柔性应变传感器,其因自身特殊的弹簧结构而在拉伸过程中发生形变,导致面积减小,电阻变大[20]。
2 性能参数
通常,评价纤维/纱线柔性电阻式应变传感器的性能参数有灵敏度、传感工作范围、线性度、循环稳定性和响应时间等。
2.1 灵敏度
应变传感器的灵敏度一般用应变系数表示,可通过式(2)计算:
(2)
式中:kGF为传感器的应变系数;R0为传感器在初始(未拉伸)状态时的电阻;ΔR为传感器在拉伸状态时的电阻(R)与R0的差值;ε为施加的应变。
灵敏度的高低是评价传感器性能的重要指标。应变系数越大,灵敏度越高。
2.2 传感工作范围
作为可穿戴设备,纤维/纱线柔性电阻式应变传感器的传感工作范围(即应变感测范围)必须足够宽,以满足人们的日常活动需求。以步行时为例,脚部、腰部和关节处皮肤的拉伸率和收缩率高达55%。因此,纤维/纱线柔性电阻式应变传感器应在0~55%的传感工作范围内完全发挥作用,以便监测相关的信息[21]。
2.3 线性度
应变和电阻变化之间的线性度也是应变传感器重要的评价指标,因为它直接关系着传感器能否准确地反映真实的应变。
2.4 循环稳定性
循环稳定性是指应变传感器在多个循环拉伸测试中表现出稳定且相似的监测应变的能力。作为可穿戴设备,在100 000次的拉伸-释放循环测试中保持性能稳定是最基本的要求,这代表着纤维/纱线柔性电阻式应变传感器能满足在一年之中每天穿戴约5 h且每分钟拉伸-释放1次的需求。
2.5 响应时间
响应时间是指形变发生时传感器将物理形变转变为传感信号所用的时间。为了能够可靠地监测到诸如脚踢之类的快速运动,纤维/纱线柔性电阻式应变传感器需要在高频(>1 Hz)变形条件下保持性能稳定,这对应变传感器的响应时间提出了很高的要求。
除此之外,因为包含有纤维/纱线柔性电阻式应变传感器的织物在使用过程中会暴露于各种环境(如不同温湿度)中,且不可避免地要经历水洗,因此还要求纤维/纱线柔性电阻式应变传感器具有可洗性和环境稳定性等性能[22]。
3 制备方法
纤维/纱线柔性电阻式应变传感器的制备方法可分为三种:涂层法——以纳米导电材料[如银纳米线(AgNWs)、CNTs、石墨烯等]修饰纤维/纱线表面,在纤维/纱线表面形成传感层;熔融纺丝法或湿法纺丝法——将导电材料掺入聚合物中,通过熔融纺丝法或湿法纺丝法得到复合纤维应变传感器;纱线结构设计法——通过纱线的结构设计赋予刚性导电纤维/纱线拉伸传感性能。
3.1 涂层法
利用导电材料涂覆绝缘弹性纤维是较早出现的制备纤维/纱线柔性电阻式应变传感器的一种方法,具体操作主要有原位聚合法、喷涂法、浸涂法、气相沉积法等。如,Fan等[23]通过对聚氨酯(PU)纤维涂覆聚苯胺(PANI)的方法得到了传感工作范围上限高达1 500%的柔性电阻式应变传感器,但该传感器循环稳定性较差。Kim等[24]利用原位聚合法在聚酯(PS)纤维上聚合了聚乙烯二氧噻吩(PEDOT)作为导电层,并使用聚甲基丙烯酸甲酯(PMMA)进行封装,制得了柔性电阻式应变传感器(图1)。但该传感器传感工作范围仅为0~20%,且应变系数为-0.76(电阻随拉伸而降低),循环稳定性也较差。为了提高纤维/纱线柔性电阻式应变传感器的耐久性,Wu等[25]9936-9945通过逐层沉积的方法制备了涂覆有导电聚合物的PU纱线应变传感器,然后将其嵌入到聚二甲基硅氧烷(PDMS)基体中(图2)。该传感器在1%的形变下应变系数高达39.00,且在10 000次循环拉伸测试中循环稳定性表现优异,但使用PDMS进行包覆会限制纱线进一步的加工性能。Wang等[26]将棉线缠绕在弹性PU长丝上制成了弹性包芯纱,然后将高导电性的单壁碳纳米管(SWCNTs)通过浸入烘干的方式结合到棉/PU包芯纱中,得到不需要额外涂层的纱线柔性电阻式应变传感器。该方法简单可靠,而且应变传感器在40%的应变条件下循环拉伸测试万次无明显裂纹,循环稳定性优异,但灵敏度较低,在25%~240%的传感工作范围内应变系数仅为0.65。Cheng等[27]先在PU纤维芯表面螺旋缠绕聚乙烯纤维(PE),再将其浸渍在氧化石墨烯(GO)分散液中,制备了一种纱线柔性电阻式应变传感器。所得应变传感器具有优异的灵敏度(在1%的形变下应变系数为10.00,在50%的形变下应变系数为3.70),且经10 000次循环拉伸测试后仍保持传感性能稳定。
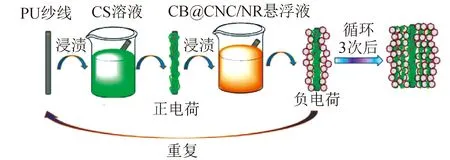
CS溶液——壳聚糖溶液;CB@CNC/NR悬浮液——碳黑/纤维素纳米晶体/天然橡胶悬浮液图2 涂层PU纱线制备示意
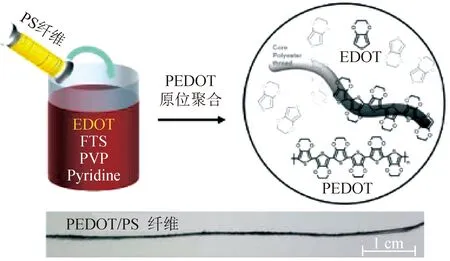
EDOT——3,4-乙烯二氧噻吩;FTS——对甲苯磺酸铁溶液;PVP——聚乙烯吡咯烷酮;Pyridine——吡啶图1 PEDOT在聚酯纤维上的原位聚合
总之,相比于其他制备方法,涂层法制备纤维/纱线柔性电阻式应变传感器简单、便捷,其可实现传感器灵敏度高和传感工作范围可调,只是循环稳定性有待进一步提高。
3.2 熔融纺丝法或湿法纺丝法
熔融纺丝法(图3)或湿法纺丝法也是生产纤维/纱线柔性电阻式应变传感器的方法,可用于大量制备弹性复合纤维柔性电阻式应变传感器,并可进一步编织到织物中去。
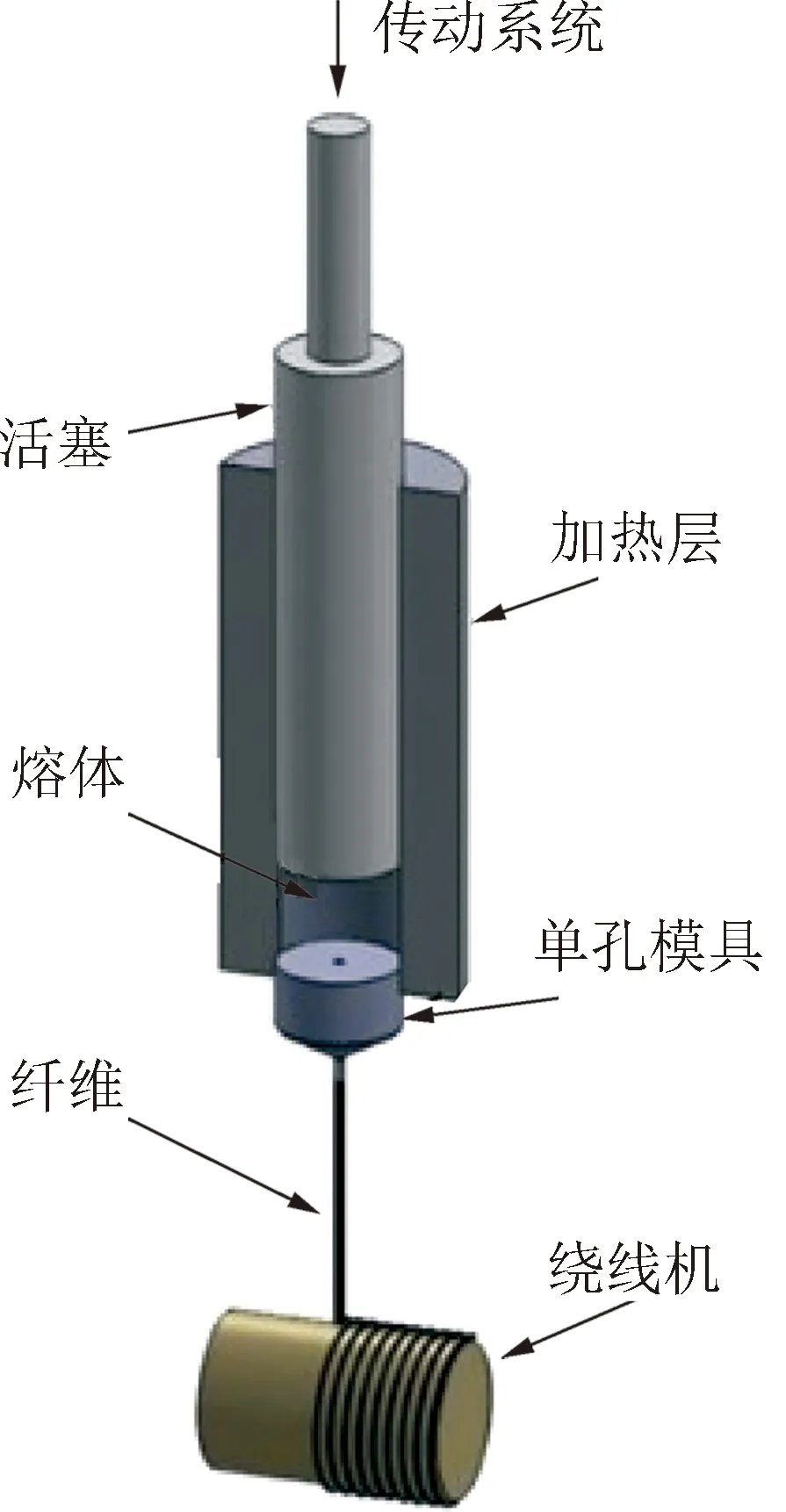
图3 熔融纺丝法过程示意
Mattmann等[28]先将热塑性弹性体(TPE)和碳黑(CB)粉末混合并熔融挤出,制得弹性体导电复合纤维,再使用硅胶膜将复合纤维附着到织物上用作应变传感器。发现该应变传感器能在满足应变系数大于20.00的条件下拥有20%~80%的传感工作范围。只是纺丝液的黏度会随着填料的添加而增加,黏度过高会导致纺丝困难,所以熔融纺丝法仅允许有限地掺入导电填料。据报道,将多壁碳纳米管(MWCNTs)和聚碳酸酯(PC)混合后,能以熔融纺丝的方式制备出纤维柔性电阻式应变传感器,并发现当纺丝液中MWCNTs的质量分数超过4%时,纺丝液的可纺性变差,且形变超过5%时应变传感器便无法进行监测[29]。
相较于熔融纺丝法,湿法纺丝法允许加入更多的导电填料,且导电填料能分散得更加均匀,纺出的纤维直径更加一致,传感性能更好。湿法纺丝时,先将聚合物主体和导电填料以一定的比例溶解在适当的溶剂中,再将混合溶液挤入凝固浴中获得纤维。Tang等[18]6624-6635将CNTs与有机硅氧烷弹性体混合物作为芯层,纯硅氧烷弹性体作为皮层,通过湿法纺丝的方法得到了具有皮芯结构的弹性导电纤维(图4)。发现该纤维用作应变传感器具有高度可拉伸性能(伸长率超过300%)、优异的循环稳定性(循环拉伸测试大于10 000次)、快速的响应时间、低滞后性和良好的耐洗性,且对弯曲和扭转不敏感,可以直接复合于衣物或皮肤表面。Zhou等[30]同样运用湿法纺丝技术,以CNTs/热塑性弹性体(TPE)复合材料作为芯层,以纯TPE为皮层,制备出具有皮芯结构的柔性应变传感器,其能在100%形变时应变系数达到425.00。
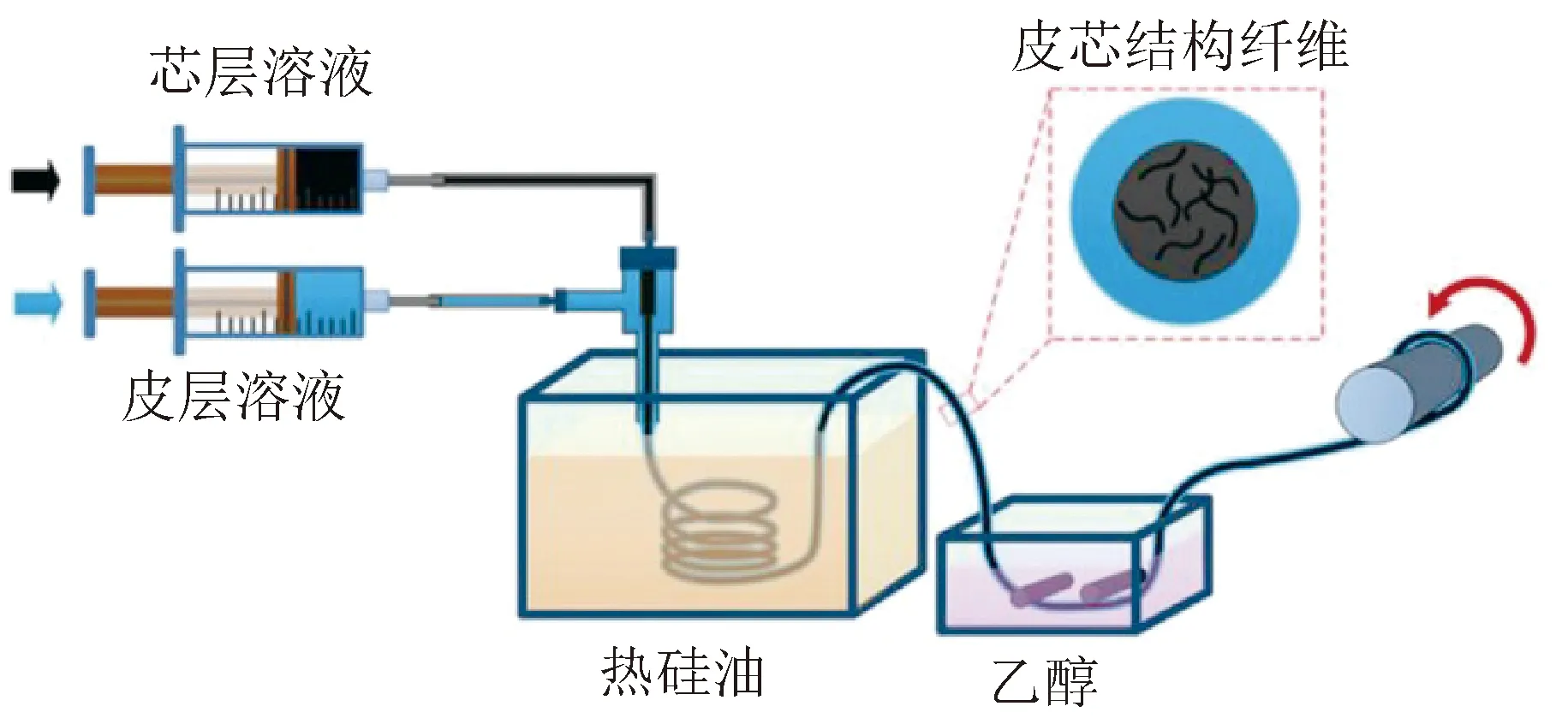
图4 高度可拉伸纤维的同轴湿法纺丝工艺示意
使用熔融纺丝法或湿法纺丝法可轻松实现纤维柔性电阻式应变传感器的工业化生产,且皮芯结构的复合纤维应变传感器通常具有更高的灵敏度和更好的循环稳定性,以及更宽的检测范围,因而具有相对广阔的应用前景。
3.3 结构设计法
刚性或低弹性的导电纤维无法直接用作柔性应变传感器,但通过结构设计(如加捻、螺旋等)可赋予刚性纤维或低弹性纤维拉伸性,这也是制造纤维/纱线柔性应变传感器的策略之一。Shang等[31]以气相沉积生成的碳纳米管薄膜作为原料,通过电机扭转成纱线,再适量加捻,得到了具有弹簧结构的碳纳米管纤维绳圈。该纤维绳圈具有独特的弹簧螺旋结构,可承受285%的拉伸应变,克服了碳纳米管可拉伸性不足的缺点(图5)。Li等[32]开发了一种高拉伸性的卷绕式CNTs纱线应变传感器,其传感工作范围上限高达500%,且循环稳定性较高。目前,已报道的通过结构设计制备的纤维/纱线柔性电阻式应变传感器都具有出色的循环稳定性和快速的响应时间。

图5 弹簧结构的CNTs绳圈
4 在智能穿戴领域的应用
图6展示了纤维/纱线柔性电阻式应变传感器在智能可穿戴领域对人体运动与健康监测的应用。纤维/纱线柔性电阻式应变传感器可应用于人体较大形变(如手指、胳膊、腿部运动等)和微小形变(如发声、表情、脉搏等)的监测。
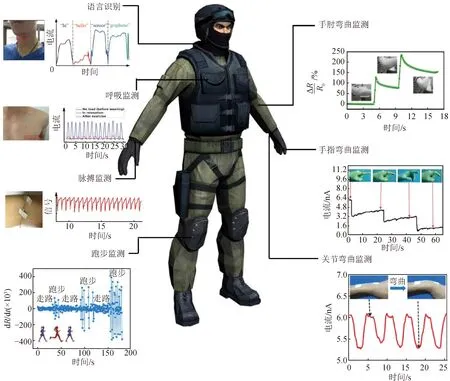
图6 纤维/纱线柔性电阻式应变传感器在人体上的应用
目前,在大形变检测方面已有诸多的报道[33]。如,Ryu等[34]开发了一款基于CNTs纤维的应变传感器,其具有很高的伸缩性,可用于手指运动的监测。Park等[35]通过缝在肘套中的石墨烯(GNP)涂层纱线应变传感器监测手臂的弯曲运动。
纤维/纱线柔性电阻式应变传感器在语音识别、呼吸和脉搏等健康监测领域同样拥有巨大应用潜力。如,Cheng等[12]7365-7371将被等离子空气蚀刻后的纤维浸入氧化石墨烯溶液中,制得了柔性纱线应变传感器。将该纱线柔性应变传感器安装到喉咙处,发现当重复阅读诸如“hi”“hello”“sensor”等不同单词时,传感器会展现出独特的电信号,重复阅读相同的单词时电信号相似,这与每个单词都会引起声带独特的运动有关。Wu等[25]9936-9945通过逐层沉积法制备的超高灵敏度PU纱线传感器实现了对微笑、哭泣等表情的监测。Zhong等[36]将AgNWs浸涂到纳米纤维纱线中得到了具有超高灵敏度的纱线传感器,用于脉搏的监测。
5 总结与展望
本文综述了纤维/纱线柔性电阻式应变传感器的研究现状,重点介绍了这类应变传感器的传感机理、性能参数和制备方法,并进一步展示了这类应变传感器在人体运动、健康监测等领域的应用。但目前纤维/纱线柔性电阻式应变传感器的制备还较为复杂,循环稳定性和灵敏度等方面还有待提高,在智能可穿戴领域应用仍有很多需要解决的问题,如在实际应用中容易被信号干扰,且编织到智能服装中后还面临着磨损、水洗等挑战。