基于滑模观测器的单相电流源控制策略
2022-05-08陈弈甫吴一庆张彦虎
陈弈甫,吴一庆,张彦虎
(1.上海电力大学 电子与信息工程学院,上海 201306;2.杭州钱江电气集团股份有限公司,浙江 杭州 311200;3.阳光新能源开发股份有限公司,安徽 合肥 231600)
最优控制理论原用于解决航天控制与火箭制导领域的最小燃料损耗问题,而线性二次型控制(LQR)与线性二次型高斯控制(LQG)作为一种最优控制,拥有众多优点,有学者研究在并网逆变器下使用基于卡尔曼滤波的LQG控制策略[1-7]。而其在传统工业行业未能获得广泛使用,原因为:(1)无稳定裕度;(2)无经典控制中极点配置。
滑模观测器常用于电机控制,用来预测转子的相位角,由于其易于编程,适合运用到嵌入式技术中,随着电力电子技术的发展,已经运用新能源并网,来预测电网电压实现前馈解耦策略。本文采用滑模观测器来获取系统的状态变量,以期实现减少传感器数量,可以直接用于旧L型电路结构,实现硬件的重复利用。
1 系统结构
1.1 系统建模与分析
为了分析滤波器对系统的影响,假定逆变器增益kpwm=1;忽略电感和电容上的寄生电阻,根据基尔霍夫电压电流定律,可以得到单相LCL滤波器部分的微分方程:

为了在DSP中实现数字控制,需对模型进行离散化,由于采样频率高,可以近似认为采样数值在一个采样间隔内不变,故使用零阶保持器(ZOH)离散。

其中,
1.2 基于等效控制的离散滑模观测器
系统的状态变量的获取精度决定了系统控制性能,传统的隆伯格状态观测器即便在系统参数精确的情况下,观测得出的系统状态量仍有误差;在恶劣的工况下,系统的外部干扰强,所得到的观测量中含有扰动信号,有文献采用了卡尔曼滤波器(最优观测器),取得了一定效果[8];但由于受DSP运行速度限制,难以实现,通常用离线迭代出稳态解作为卡尔曼滤波器的增益,但在系统启动时的状态不能很好地估计;本文考虑到兼顾离散情况下的状态观测与抗扰动,参考文献[9]设计出准滑膜观测器。
为了简化系统建模,使用未考虑一阶延时的模型,首先判断系统能观性。计算如下矩阵的秩。

由能观性秩判据可得系统能观。且C行满秩。则可对系统做如下变换考虑到滑模观测器的鲁棒性,采用坐标变换x→Tx,则系统方程可变换为:

其中,

与连续情况不同,采样时间Ts限制了滑模面切换频率,故未知扰动项ex′不能保证通过设立充分大的L来强迫系统运动轨迹收敛于滑模面。
对误差状态量ex′进行分析,将等效控制veq(k)代入得:

可见若令G11+LG21=0,即观测器是无差拍的,则能保证至多在6个采样周期内误差量ex′趋近于0,即观测器在第7个采样周期到达滑模面S。
2 最优控制综合设计——系统参数
由文献[10]所给出的方法,可以通过在连续域中确定主导极点位置:

通过映射关系z=esTs便能得到离散域极点,其中,ξ为阻尼比,ωn为无阻尼自然震荡角频率。根据ITAE最优准则,可以给定阻尼比ξ=0.707。为了兼顾系统带宽与逆变器谐振频率限制,取

令Q=q*I10×10,R=r*I2×2。则下面取3组不同的qr值来分析系统的零极点情况。
如图1所示,无论qr取何值,通过最优控制策略配置出的系统极点都位于以原点为圆心,半径1/a的范围之内,保证了闭环系统收敛的速度,同时qr参数的选择对极点的位置与系统增益都有影响,具体表现为q值的增大有利于系统的快速性,但反馈增益将会增大,容易使得系统饱和,不利于稳定性,而r值正好相反。综合以上考虑,最终参数选取为q=1,r=1。

图1 规定衰减速度系统零极点
3 仿真与实物
3.1 仿真结果
按照计算的结果在simulink搭建模型并进行仿真,对比了传统双电流环PI结构与本文提出的控制策略。仿真所用数据以第三章计算获得代入,在0.2 s时突变指令信号,由40 A降至20 A,在0.4 s时切除一半负载,由1Ω降至0.5Ω。
3.1.1 策略对比
由图2、图3可以看出,两种控制策略都基本能实现电流控制,两者的电流响应时间相近,大约为80 ms,但在响应过程中,双PI控制的超调量明显大于本文策略下的值,而且对控制指令跟踪的精度也有着较为明显的差距。

图2 双PI闭环策略下指令信号与实际值的误差

图3 基于滑模观测器的PI+LQR策略下指令信号与实际值的误差
定义指令信号误差比公式:

将2种控制策略的仿真数据代入并绘制图形,如图4所示。
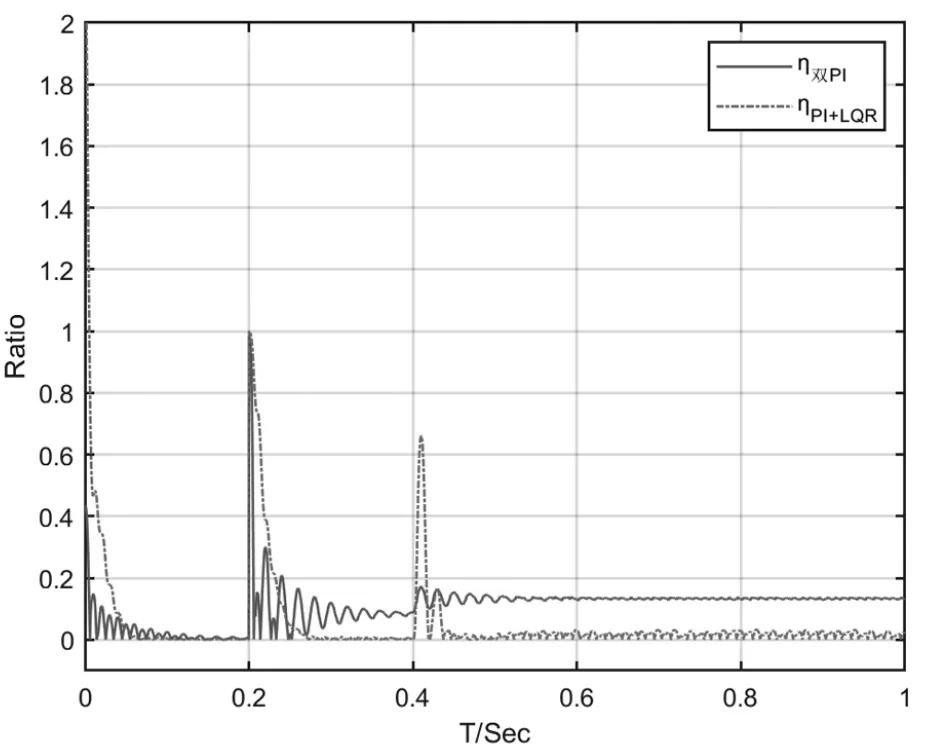
图4 两种策略下指令信号误差比的对比
可见不论在指令信号发生突变还是负载突切时,本文策略都能很好地跟踪指令的变化,并且没有稳态误差;而双闭环PI控制在跟踪过程中不仅有抖振,而且还有较为明显的误差,影响了最终输出电流波形的控制精度。
本文的策略在负载突变时有较为明显的超调,这是由于实际系统的参数发生了变化,与预设的系统观测器和系统矩阵不一致导致的,但最终仍能收敛至指令信号值,体现了控制的鲁棒性。
3.1.2 观测器效果分析
采用滑模观测器的状态反馈控制与实际状态量进行反馈控制的对比如图5与图6所示。

图5 实际状态量反馈与观测器观测值反馈输出电流波形对比

图6 基于滑模观测器的PI+LQR策略下各系统状态量观测值与实际值的对比
由图5、图6可以看出,在系统的负载未发生突变前,观测器的值能够较好地估计出系统的状态分量,体现在输出电流波形在80 ms左右收敛到实际值,各个状态量观测值与实际值的误差不超过5%,其中输出电流和电感电流的误差分别在0.2%与3%;而在负载突变后,输出电流和电感电流的误差上升到0.34%与7.2%,而q轴电容电压的估计值则较为偏离实际值,误差为41.7%。这也是导致负载突变时基于观测器的状态反馈超调量大的原因。
3.2 实物波形
搭建50 W小功率单相H桥逆变器实验平台。控制和采样系统使用DSP28069控制芯片完成,开关/控制频率10 kHz,采用空气开关用来切换负载,其他实验参数与仿真参数相同。实验波形如图7所示。

图7 实验波形
实验结果说明相较于传统PI控制,在采用本文研究策略后,波形畸变率明显减小,在负载突变时,输出电流在2个周期内迅速达到稳定,且控制精度得到了明显的提升,具有良好的动态响应,验证了所提出基于滑模观测器的PI+LQR控制算法的有效性。
