基于液晶空间光调制器的相移数字全息显微测量系统精度分析
2022-05-07钱晓彤田爱玲刘丙才王红军牛瑞朱学亮魏翔
钱晓彤,田爱玲,刘丙才,王红军,牛瑞,朱学亮,魏翔
(1 西安工业大学 光电工程学院,西安 710021)
(2 陕西省薄膜技术与光学检测重点实验室,西安 710021)
(3 西安交通大学 苏州研究院,江苏 苏州 215100)
0 引言
数字全息技术[1]具有全场、无接触、快速测量三维物体等特点,已广泛应用于三维显示[2-3]、无损检测[4-5]、生物测试[6-7]等多个领域。数字全息技术可分为离轴和同轴两种记录方式,前者能够有效消除共轭像与零级像的干扰,但受限于记录器件分辨率与靶面尺寸的大小;后者记录时物参光夹角为零,记录器件的空间带宽积利用率高,但不能分离共轭像与零级像。若在同轴数字全息中引入相移技术[8-10]使重建像与干扰像分离,可重建出分辨率更高、噪声更低的再现像,提高数字全息的三维测量精度。因此,针对相移数字全息测量系统的研究具有重要的工程应用价值。
由于传统机械移动的相移方法在测量过程中会不可避免地引入随机误差及系统误差,因此为提高相移数字全息的三维重建精度,有学者提出利用液晶空间光调制器(Liquid Crystal Spatial Light Modulator,LCSLM)的相位调制特性实现无机械移动相移数字全息[11]。然而LCSLM 的相位调制精度受多种因素影响,在高精度测量领域有必要在应用前对其进行相位标定。中国科学院光电技术研究所白福忠等[12]为提高LCSLM 波前调制精度,通过泰曼格林干涉仪测量LCSLM 的相移特性,改进马赫泽德装置,对LCSLM 内部反射硅基板引入的相位误差进行标定,将波前像差的PV 值从0.39λ降低到0.23λ,RMS 值从0.08λ降低到0.03λ。在三维显示领域LCSLM 常应用于模拟波前,哈尔滨理工大学张洪鑫等[13]为提高其波前模拟精度,建立LCSLM 为波前发生器的波前模拟系统,产生RMS 值为0.265λ的模拟误差,利用斐索干涉系统对LCSLM 的波前模拟误差进行标定,标定后RMS 值减小到0.223λ。以上研究都未提及标定过程中LCSLM像素不匹配的问题,然而LCSLM 中每一个像素由一个独立液晶[14-16]控制,若像素不匹配则无法对独立液晶产生的相位进行标定,会降低LCSLM 的相位调制精度,同时也会使LCSLM 调制的相移量存在误差。因此,本文通过每个液晶单元的灰度值调节,修正整体畸变相位,从而消除LCSLM 的边缘效应和空间不均匀性,并将其应用在相移数字全息实现高精度测量。
本文展开了基于LCSLM 相移数字全息的二次相位标定理论研究,利用斐索干涉测量系统,根据具体实验要求对其相位调制特性进行一次标定,测量了LCSLM 的灰度-相位调制曲线,然后测量经LCSLM 调制后产生的畸变相位,并通过设计相位共轭灰度图实现LCSLM 的二次相位标定,所提出方法降低了测量复杂度。以马赫泽德干涉为原型,设计基于LCSLM 的相移数字全息测量装置,对透射式物体微透镜阵列进行相应的实验测试与误差分析。
1 基本原理
1.1 基于LCSLM 的相移数字全息
相移数字全息将相移干涉技术与数字全息技术相结合,基本原理是:位于物面的被记录物体所射出的物光与被相移装置控制的参考光在全息面发生干涉,全息图被位于全息面的CCD 记录,以数字矩阵的形式保存在计算机中,利用计算机软件及相移重建算法进行模拟再现,从而得到原物体的清晰像。
由于反射型LCSLM 的液晶层厚度为透射型的一半,响应速度快、分辨率高,因此,将反射型LCSLM 作为相移数字全息系统的相移器件调制相位,测量原理如图1。激光器经过显微物镜(MO1)和会聚透镜(L)组成的扩束准直系统(BE)后,由反射镜M1转向入射到分光棱镜(BS1)1∶1 分成两路光束,透射光为物光路(O),反射光为参考光路(R)。物光透过物体并由MO2放大,入射到BS3上;参考光经BS2透过偏振片P,垂直入射LCSLM,经其反射后再次通过P,入射至BS2转向,由MO3放大后入射到BS3上。参考光和物光经BS3合束后发生全息干涉,通过CCD 相机记录全息图。

图1 基于LCSLM 的相移数字全息原理示意Fig.1 Schematic of phase-shift digital holography of reflective LCSLM
设被记录物体位于x0y0平面,CCD 记录面位于xy平面,再现像位于x1y1平面,CCD 记录面距离物平面z0,距离再现像平面z1。CCD 记录的相移全息图干涉强度分布可表示为

式中,Ao(x,y)和Ar(x,y)分别为物波和参考波的振幅分布;φo(x,y)和φr(x,y)分别为物波和参考波的相位分布;δm为LCSLM 第m次改变灰度在全息记录中引入的相移量。
在记录的全息图中,物体的零级谱、+1 级谱和−1 级谱在频谱域重叠影响再现像的质量,本文采用四步相移技术去除零级谱和−1 级谱,获得物光波的复振幅分布进行再现。
四步相移技术要求记录四幅不同的干涉图,在参考光路中引入步长分别为0、π/2、π、3π/2 的相移量,通过式(1)可得记录面上物光波的复振幅分布为

式中,I1、I2、I3、I4分别为0、π/2、π、3π/2 相移全息图的干涉强度分布。
计算机数字模拟产生参考光波,利用角谱再现法得到的成像面上复振幅的表达式为

式中,z1为衍射距离,λ为波长,Gz(fx,fy)为物光波U(x,y)的衍射光波在像平面的频谱。由式(3)可得到相应的再现相位分布

式中,Im 与Re 分别表示复振幅的虚部和实部。由于求解相位时使用了反正切函数,其主值域为(-π,π],因此,所求相位被限定在(-π,π]内,直接计算得到的相位被包裹。对式(4)采用最小二乘相位解包裹算法[17],得到待测物体真实的相位分布,同时消除数字参考光对再现光的影响[18]。
1.2 二次相位标定
LCSLM 存在边缘效应及空间不均匀性的问题,导致LCSLM 中每一个液晶产生的相移量存在一定的误差,光波经其调制后会产生畸变波前相位。二次相位标定方法是利用LCSLM 的灰度响应特性及光学相位共轭原理,对LCSLM 进行相位畸变校正。
根据波前相位共轭补偿原理:LCSLM 中由灰度控制各个液晶进行相位调制,一束光经其调制后产生畸变相位,设计与畸变相位共轭的灰度图,当光通过共轭灰度图控制的LCSLM 后相位畸变被抵消,光束恢复到无畸变的理想状态。
设实际畸变波前的复振幅分布表示为

式中,A和δ为畸变波前的振幅及相位,(i,j)为空间坐标。
共轭畸变波前的复振幅分布可表示为

式中,*为共轭;ϕ(i,j)为共轭波前相位,且ϕ(i,j)=-δreal(i,j)。
利用Zygo 干涉仪测量畸变波前的相位数据,由于干涉仪测量范围大于LCSLM 靶面,因此相位数据中被测面以外的无效数据被赋予0 值,提取ipixel×jpixel 大小被测面的相位信息δreal(i,j)。然后对数据进行预处理得到共轭相位,可表示为

式中,max 和min 表示取最大、最小相位值的平面。
再通过程序编码为共轭灰度图gs(i,j),可表示为

式中,s为灰度值;f为灰度-相位数据转换函数。
由于存在LCSLM 与干涉仪中CCD 分辨率不匹配的问题,为保证编码出与LCSLM 分辨率xpixel×ypixel 大小相等的灰度图,对gs(i,j)进行二维线性插值,x方向每隔插值1 个数据,y方向每隔插值1 个数据,得到与LCSLM 分辨率相等的共轭灰度图,可表示为

将式(9)中的共轭灰度图加载在LCSLM 上调节每个液晶灰度值,即可达到修正整体畸变相位的效果,提高LCSLM 的相位调制精度。
2 实验结果与讨论
2.1 LCSLM 二次标定补偿实验及分析
实验测量系统如图2,采用的斐索干涉仪为美国Zygo 公司的VeriFire PE 干涉仪,该激光干涉仪能够提供常规及高精度的光学表面面型测量,可同时获得LCSLM 整个液晶靶面上的相位分布情况。根据实验原理搭建光路,干涉仪发出波长为632.8 nm 的He-Ne 激光被干涉仪内的标准平面镜即参考镜分为两部分光,一部分经平面镜反射到干涉仪内部作为参考光,一部分透过平面镜由衰减片降低光强后,经偏振片调制为线偏振光,被LCSLM 反射回来的光为物光,物光和参考光发生共路干涉,由干涉仪内部CCD 采集干涉条纹图,通过PC1中干涉仪分析软件得到对应面型的各种测量结果,PC2用来控制向LCSLM 输入灰度图。

图2 二次标定补偿实验原理Fig.2 Schematic of secondary phase calibration experiment
本文选用的LCSLM 分辨率为1 920 pixel×1 200 pixel,像素大小为8 μm。实验装置中使用的激光为非偏振光,使通过偏振片后的线偏振光振动方向与LCSLM 液晶长轴方向一致,可实现LCSLM 的纯相位调制,以达到最佳调制精度。
根据基于斐索干涉的LCSLM 相位调制曲线测量方法[19],测量得到本实验中的LCSLM 加载255 灰度图时对应的相移量为0.998λ,相位的最大调制范围为1.996π,相位调制曲线如图3。可得相移量0、π/2、π、3π/2 所对应加载的灰度值分别为0、68、137、191。
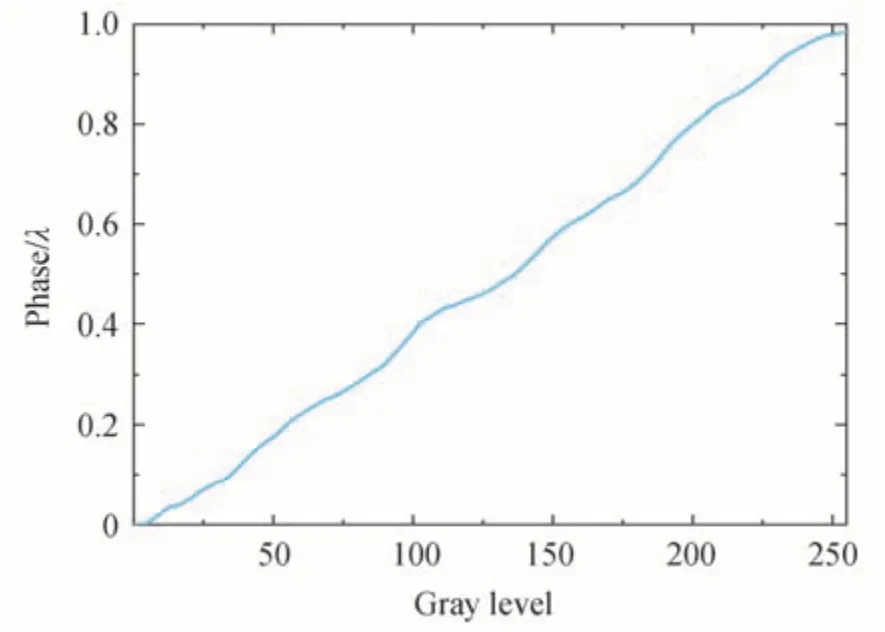
图3 LCSLM 相位调制曲线Fig.3 LCSLM phase modulation curve
基于1.2 节所述二次相位标定方法,由图2 实验原理测量得到LCSLM 标定前后波前相位的测量结果,如图4 所示,其中图4(a)为0、68、137、191 灰度标定后LCSLM 的三维相位分布;图4(b)、(c)给出0 灰度标定前后LCSLM 的三维相位分布;为便于直观比较,图4(d)、(e)给出0 灰度标定前后LCSLM 的三维相位分布的截面线进行比较。

图4 LCSLM 二次相位标定结果Fig.4 LCSLM secondary phase calibration results
由图4 可知,LCSLM 中每一个像素对应的液晶分子调制相位时存在偏差,导致调制后的反射光产生畸变,降低LCSLM 的相位调制精度。图4(b)、(d)中可看出二次标定前经LCSLM 调制后的波面呈现两边高中间低的趋势;图4(c)、(e)中可看出二次标定后经LCSLM 调制后的波面呈现理想平面的趋势,相位具有起伏的状态,造成这种起伏的原因是LCSLM 自身像素间串扰产生的误差,此种误差对测量精度影响较小。将标定前后相位波面的峰谷差值(Peak-Valley,PV)和均方根值(Root-Mean-Square,RMS)作为评价指标,实验结果的评价参数,如表1。

表1 标定实验结果分析Table 1 Analysis of calibration experiment results
通过分析表1 数据可得,二次相位标定方法可减少液晶间相位调制误差,使得波前相差的PV 值由0.182λ减小到0.088λ,RMS 值由0.039λ减小到0.022λ。实验结果表明,利用二次相位标定的方法进行补偿后,其整体的液晶面调制效果更趋近于理想值,证明该方法可有效提升LCSLM 的相位调制精度。
2.2 LCSLM 二次相位标定相移数字全息实验及分析
为验证LCSLM 二次相位标定后应用于相移数字全息测量精度提升的有效性。根据马赫泽德干涉光路,设计并构建透射式相移数字全息显微测量装置,如图5。系统中使用波长为632.8 nm 的氦氖激光器作为光源,入射至偏振片后,经过50×显微物镜和透镜组成的扩束准直系统,经分光棱镜1 分成两路光束,透射光为物光路(O),反射光为参考光路(R)。物光波透过矢高为2.6 μm 的微透镜阵列,并用10×显微物镜放大,入射到分光棱镜3 上;参考光波经分光棱镜2 垂直入射LCSLM,反射后由分光棱镜2 转向,由10×显微物镜放大后入射到分光棱镜3 上。参考光和物光经过分光棱镜3 合束后发生全息干涉,通过CCD 相机记录全息图。
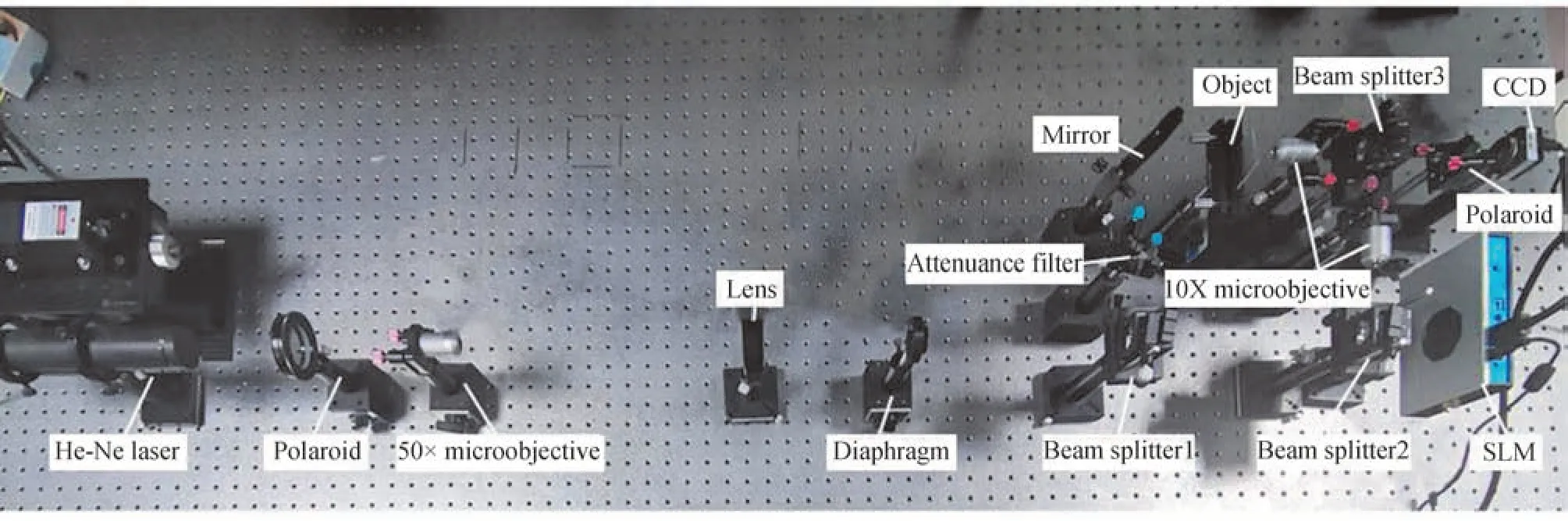
图5 LCSLM 的相移数字全息实验装置Fig.5 Experimental setup of phase-shifting digital holography based on reflection LCSLM
由2.1 节实验获得灰度值为0、68、137、191 标定后的灰度图。首先,将标定后的灰度图转换为8bit 数字二进制编码信号分别加载到LCSLM 中,改变参考光路中的相位差,采集微透镜阵列的相移数字全息图,如图6(a)~(d);然后,为去除数字全息中零级像与共轭像的干扰采用四步相移算法及再现算法处理全息图,得到微透镜阵列的包裹相位分布,如图6(e);其次,利用最小二乘算法对相位进行解包裹得到连续的真实相位分布,如图6(f);最后,由于实验系统中各个光学元件会引入相位畸变,因此需要对再现像进行畸变校正,获得准确的被测件相位分布,利用相位畸变补偿算法消除系统误差引起的相位畸变,得到微透镜阵列的二维相位图及三维相位图,如图6(g)、(h)。
为验证LCSLM 二次相位标定后的效果,给LCSLM 上加载标定前的灰度图,采集四幅全息干涉图,利用上述再现方法得到标定前的重建相位图。为便于直观比较,将标定前重建相位图的截面线与图6(g)中标定后重建相位图截面线对比,如图7 所示。

图6 LCSLM 二次标定后相移数字全息实验结果Fig.6 LCSLM secondary calibration after phase shift digital holographic experiment results
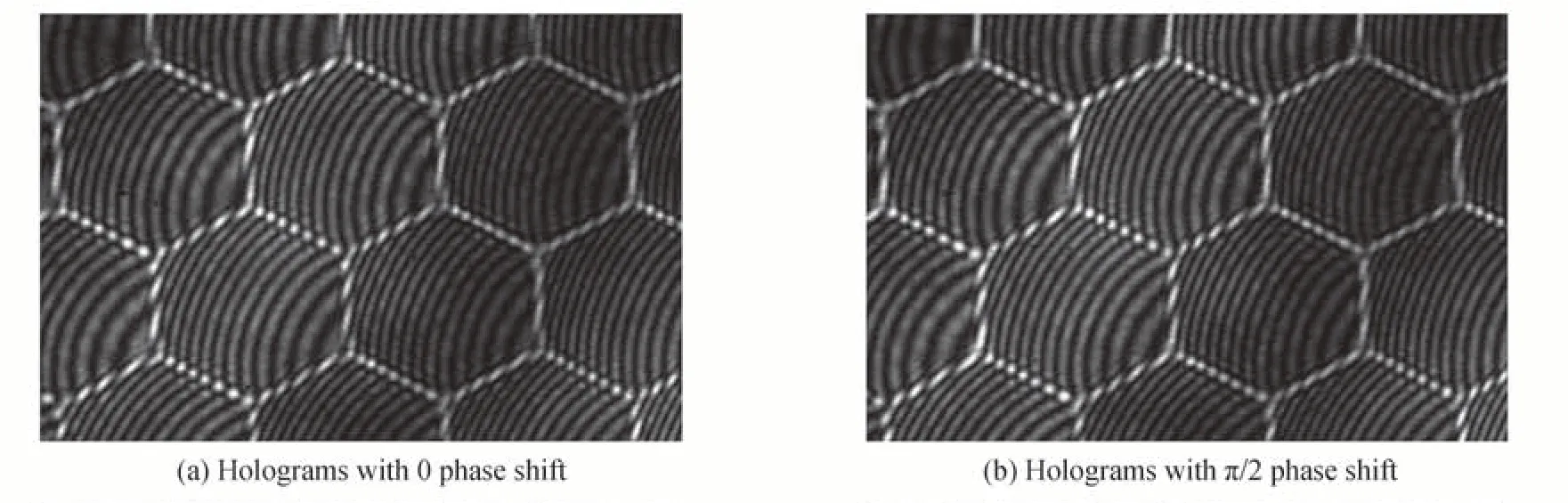
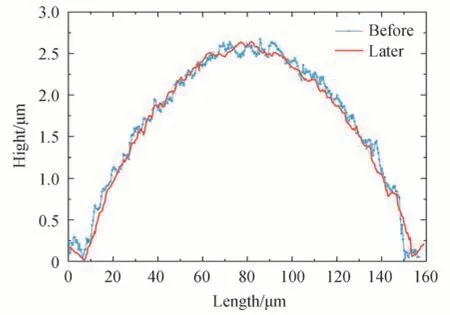
图7 标定前后截面线对比分析结果Fig.7 Comparative analysis result before and after calibration
由图7 可见,LCSLM 二次相位标定前与标定后测量结果形貌较为吻合,在不使用额外噪声滤波的情况下,标定前测量波面的锯齿状起伏较大,标定后的测量波面较为平滑,恢复的相位精度更高。实际测量标定前微透镜阵列的纵向矢高为2.68 μm,得到矢高的相对误差为3.08%;标定后微透镜阵列的矢高为2.63 μm,得到矢高的相对误差为1.15%,由此可知,相移数字全息系统中将二次相位标定后LCSLM 作为相移器可提高测量精度。
3 结论
本文研究了反射式空间光调制器二次相位标定的方法并将其应用于相移数字全息中,基于斐索干涉系统,测量反射式LCSLM 畸变波前的相位;计算获得共轭相位,利用二维图像插值算法及灰度化算法,编码设计出与LCSLM 分辨率相等的灰度图;加载在LCSLM 上实现了等灰度调制误差的二次标定。实验结果表明,通过测量LCSLM 的相位调制曲线和畸变波前相位,经标定后波前相差的PV 值减小到0.088λ,RMS 值减小到0.022λ。将标定后的LCSLM 应用于相移数字全息测量系统中,得到微透镜阵列矢高的相对误差减小到1.15%。由此可见,在干涉测量装置中使用液晶器件,可以控制相位重建的精度,标定后的LCSLM 具有较强的波前控制能力,获得了显著改善的相位图像。相比于传统机械移动的相移测量技术,此技术操作方便、装置简单,只需控制LCSLM 来改变加载的图案,数据采集更加快速,降低了对环境等实验条件的要求。可应用于形变分析、微纳器件三维测量等领域,因此该技术具有很好的研究价值和应用前景。
