多传感器融合的自动泊车建图定位研究
2022-05-07安林芳宋圆圆
安林芳 宋圆圆
摘 要:自动泊车系统中的建图定位不仅负责对车辆周围信息进行感知和建模,还包括对车辆自身进行定位和跟踪反馈。建图定位为后续自动泊车的路径规划、决策控制提供依据,是整个泊车系统的根本基础,也是决定车辆自动泊车质量的直接因素。鉴于此,总结了近年来自动泊车系统建图定位方法的相关研究成果,对涉及的各类技术进行了介绍和分析,推断出今后关注的重点将是利用各类传感器、算法的融合,实现对泊车环境更加客观的清晰描述,控制算法将更加高效精准且稳定。
关键词:自动泊车;建图定位;路径规划;决策控制;自动驾驶
中图分类号:U463.6;TN967 文献标志码:A 文章编号:1671-0797(2022)09-0021-03
DOI:10.19514/j.cnki.cn32-1628/tm.2022.09.006
0 引言
自动泊车系统作为自动驾驶技术中不可缺少的一部分,正越来越多地走进人们的生活,该功能的成功运用能够有效降低用户泊车难度,解决新手驾驶员泊车难问题。建图定位模块是自动泊车功能顺利实现的基础,主要任务是为泊车全过程提供准确、实时定位的地图信息,保证泊车安全顺利进行。目前国内并不是所有车型都配备了自动泊车系统,自动泊车系统的广泛应用依赖其基础技术的发展,因此,建图定位技术研究能够对国产汽车的泊车系统应用和发展起到积极的推动、促进作用。
1 自动泊车系统
自动泊车系统首先利用车辆配置的各种传感器获取车辆周围的环境信息,在车位扫描完成后向人机交互或控制决策模块输出可停车位;然后根据建立的地图和定位信息,系统规划出一条最优的泊车路径并完成泊车过程[1]。在此过程中,通过智能控制解决驾驶员“我在哪” “我要去哪”以及“我怎么去”這3个重要问题[2],帮助驾驶员快速、安全地完成泊车操作。
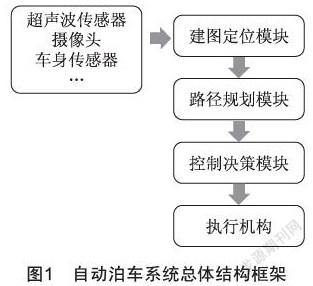
为保证车辆能够顺利完成整个泊车入库过程,自动泊车控制系统可分为建图定位、路径规划和控制决策3个模块,如图1所示。驾驶员通过操作车辆的人机交互界面开启自动泊车功能,车辆开始低速行驶,这个过程中建图定位模块利用超声波传感器、摄像头、车身传感器等进行周围环境信息的采集,扫描和识别可停车位,同时保证对车辆本身的实时定位和跟踪;路径规划模块根据建图定位模块输出的地图和定位信息进行车辆泊车路线的规划;控制决策模块主要按照规划路径和实时地图对车辆进行执行控制,通过EPS、挡位、车速等控制最终实现自动泊车。
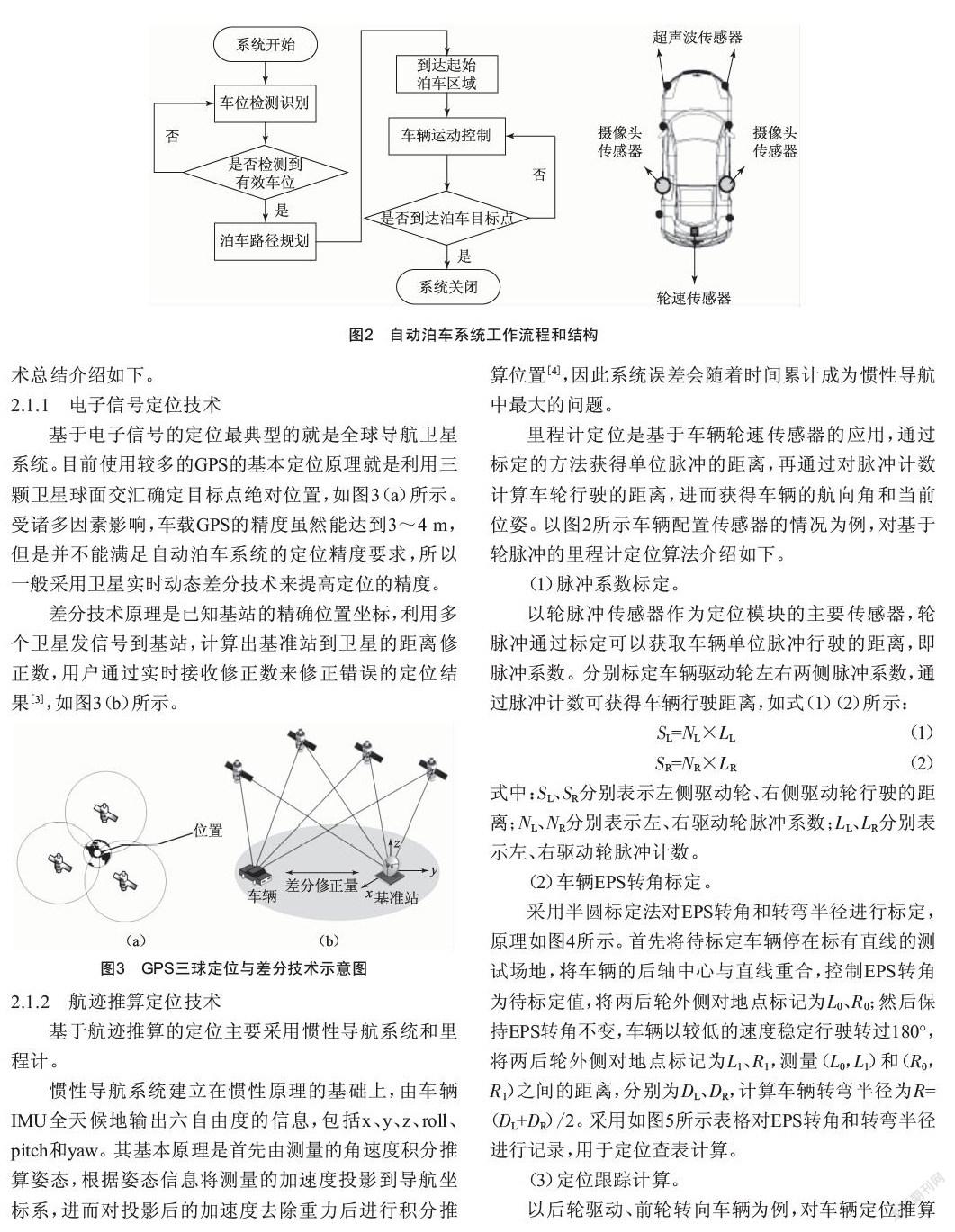
按照泊车过程分析,整个自动泊车过程可分为寻找可停车位和泊入已选车位两个步骤,其工作流程和结构如图2所示。
2 建图定位关键技术
建图定位模块的关键技术主要包括车辆本身定位和车位地图扫描两个部分。该模块需要完成车辆周围信息的感知和建模,车辆自身的定位和跟踪反馈,所建立的地图和定位信息是自动泊车路径规划和控制决策模块的根本基础,也是决定车辆自动泊车质量的直接因素。
2.1 定位技术
根据车辆配置的不同,对自动泊车常用的定位技术总结介绍如下。
2.1.1 电子信号定位技术
基于电子信号的定位最典型的就是全球导航卫星系统。目前使用较多的GPS的基本定位原理就是利用三颗卫星球面交汇确定目标点绝对位置,如图3(a)所示。受诸多因素影响,车载GPS的精度虽然能达到3~4 m,但是并不能满足自动泊车系统的定位精度要求,所以一般采用卫星实时动态差分技术来提高定位的精度。
差分技术原理是已知基站的精确位置坐标,利用多个卫星发信号到基站,计算出基准站到卫星的距离修正数,用户通过实时接收修正数来修正错误的定位结果[3],如图3(b)所示。
2.1.2 航迹推算定位技术
基于航迹推算的定位主要采用惯性导航系统和里程计。
惯性导航系统建立在惯性原理的基础上,由车辆IMU全天候地输出六自由度的信息,包括x、y、z、roll、pitch和yaw。其基本原理是首先由测量的角速度积分推算姿态,根据姿态信息将测量的加速度投影到导航坐标系,进而对投影后的加速度去除重力后进行积分推算位置[4],因此系统误差会随着时间累计成为惯性导航中最大的问题。
里程计定位是基于车辆轮速传感器的应用,通过标定的方法获得单位脉冲的距离,再通过对脉冲计数计算车轮行驶的距离,进而获得车辆的航向角和当前位姿。以图2所示车辆配置传感器的情况为例,对基于轮脉冲的里程计定位算法介绍如下。
(1)脉冲系数标定。
以轮脉冲传感器作为定位模块的主要传感器,轮脉冲通过标定可以获取车辆单位脉冲行驶的距离,即脉冲系数。分别标定车辆驱动轮左右两侧脉冲系数,通过脉冲计数可获得车辆行驶距离,如式(1)(2)所示:
SL=NL×LL(1)
SR=NR×LR(2)
式中:SL、SR分别表示左侧驱动轮、右侧驱动轮行驶的距离;NL、NR分别表示左、右驱动轮脉冲系数;LL、LR分别表示左、右驱动轮脉冲计数。
(2)车辆EPS转角标定。
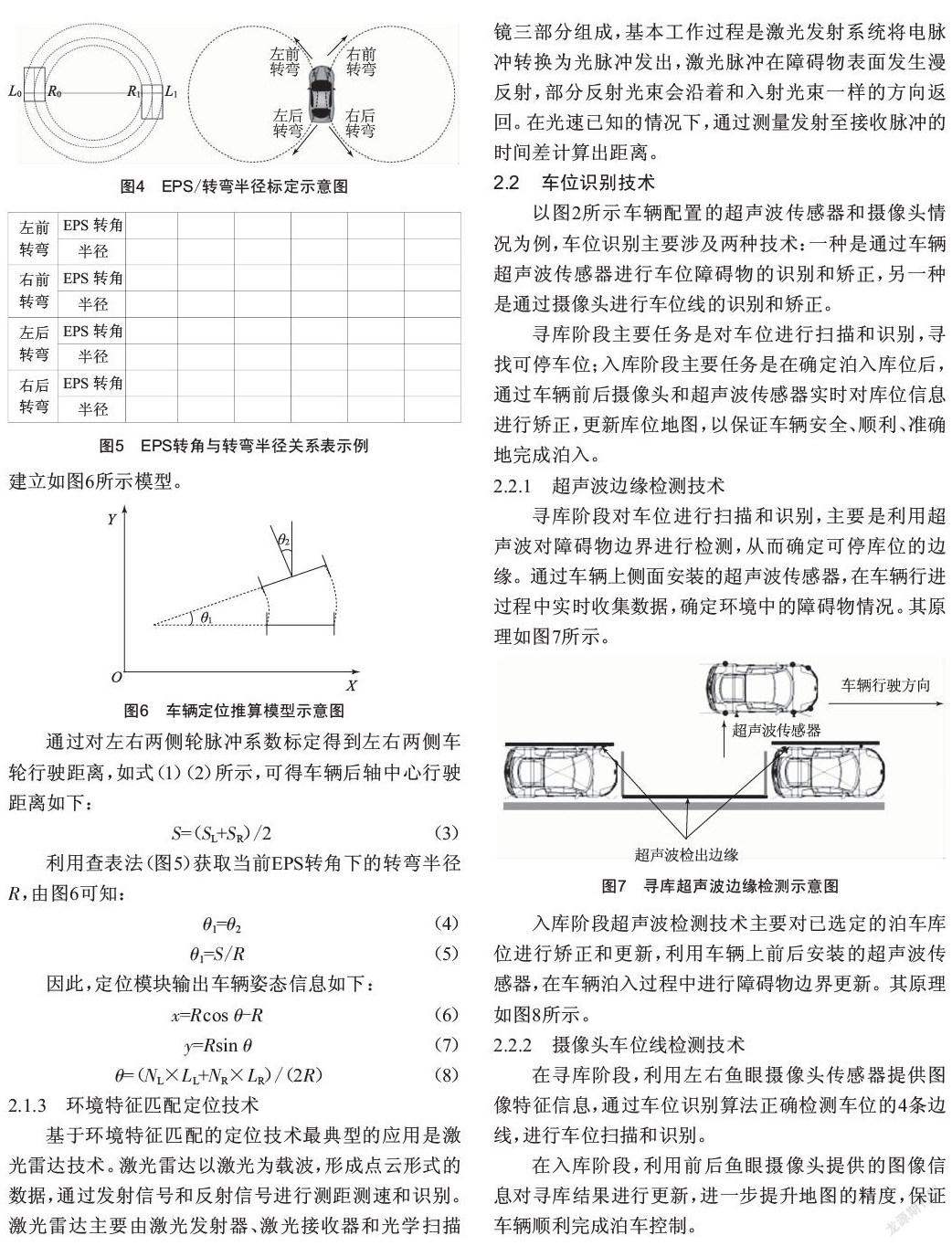
采用半圆标定法对EPS转角和转弯半径进行标定,原理如图4所示。首先将待标定车辆停在标有直线的测试场地,将车辆的后轴中心与直线重合,控制EPS转角为待标定值,将两后轮外侧对地点标记为L0、R0;然后保持EPS转角不变,车辆以较低的速度稳定行驶转过180°,将两后轮外侧对地点标记为L1、R1,测量(L0,L1)和(R0,R1)之间的距离,分别为DL、DR,计算车辆转弯半径为R=(DL+DR)/2。采用如图5所示表格对EPS转角和转弯半径进行记录,用于定位查表计算。
(3)定位跟踪计算。
以后轮驱动、前轮转向车辆为例,对车辆定位推算建立如图6所示模型。
通过对左右两侧轮脉冲系数标定得到左右两侧车轮行驶距离,如式(1)(2)所示,可得车辆后轴中心行驶距离如下:
S=(SL+SR)/2 (3)
利用查表法(图5)获取当前EPS转角下的转弯半径R,由图6可知:
θ1=θ2 (4)
θ1=S/R(5)
因此,定位模块输出车辆姿态信息如下:
x=Rcos θ-R(6)
y=Rsin θ(7)
θ=(NL×LL+NR×LR)/(2R)(8)
2.1.3 环境特征匹配定位技术
基于环境特征匹配的定位技术最典型的应用是激光雷达技术。激光雷达以激光为载波,形成点云形式的数据,通过发射信号和反射信号进行测距测速和识别。激光雷达主要由激光发射器、激光接收器和光学扫描镜三部分组成,基本工作过程是激光发射系统将电脉冲转换为光脉冲发出,激光脉冲在障碍物表面发生漫反射,部分反射光束会沿着和入射光束一样的方向返回。在光速已知的情况下,通过测量发射至接收脉冲的时间差计算出距离。
2.2 车位识别技术
以图2所示车辆配置的超声波傳感器和摄像头情况为例,车位识别主要涉及两种技术:一种是通过车辆超声波传感器进行车位障碍物的识别和矫正,另一种是通过摄像头进行车位线的识别和矫正。
寻库阶段主要任务是对车位进行扫描和识别,寻找可停车位;入库阶段主要任务是在确定泊入库位后,通过车辆前后摄像头和超声波传感器实时对库位信息进行矫正,更新库位地图,以保证车辆安全、顺利、准确地完成泊入。
2.2.1 超声波边缘检测技术
寻库阶段对车位进行扫描和识别,主要是利用超声波对障碍物边界进行检测,从而确定可停库位的边缘。通过车辆上侧面安装的超声波传感器,在车辆行进过程中实时收集数据,确定环境中的障碍物情况。其原理如图7所示。
入库阶段超声波检测技术主要对已选定的泊车库位进行矫正和更新,利用车辆上前后安装的超声波传感器,在车辆泊入过程中进行障碍物边界更新。其原理如图8所示。
2.2.2 摄像头车位线检测技术
在寻库阶段,利用左右鱼眼摄像头传感器提供图像特征信息,通过车位识别算法正确检测车位的4条边线,进行车位扫描和识别。
在入库阶段,利用前后鱼眼摄像头提供的图像信息对寻库结果进行更新,进一步提升地图的精度,保证车辆顺利完成泊车控制。
3 建图定位测试与评价
对自动泊车建图定位模块的评价主要包括对定位算法的评价和对车位地图的评价两方面。其中,对定位算法的评价以车辆位姿(x、y、θ)的准确性、实时性为测量指标和参数;对车位地图的评价是将算法库输出车位与真实车位进行对比,可从车位的漏检、误检以及车位的准确度3个方面进行测试。
4 结语
通过总结和分析可推断,未来自动泊车系统中建图定位的各类算法将进一步融合,取长补短。利用各类传感器、算法的融合实现环境感知客观清晰、控制算法高效精准且稳定,是今后自动泊车技术的重点发展方向;同时自动泊车中应用的建图定位方法可进一步推广至其他自动驾驶领域,对整个自动驾驶技术的发展具有普适性。
[参考文献]
[1] 吴飞龙.自动泊车系统路径规划及其跟踪控制算法研究[D].青岛:青岛理工大学,2021.
[2] 曾虹钧.基于多信息融合的自动泊车控制系统研究[D].西安:西安科技大学,2020.
[3] 张琦.基于组合惯导的多传感器车辆定位系统设计[D].开封:河南大学,2020.
[4] 钱闯.弱GNSS信号区域的GNSS/INS/LiDAR高精度定位方法及其应用研究[D].武汉:武汉大学,2017.
收稿日期:2022-03-15
作者简介:安林芳(1991—),女,河北人,助教,研究方向:自动驾驶、机电一体化。
