基于无人机航拍图像的输电线异物检测算法研究
2022-05-06于国军邹梓龙彭佳琪施陈敬
于国军,邹梓龙,付 小,彭佳琪,施陈敬
(1. 东华理工大学测绘工程学院, 330013, 南昌;2.东华理工大学地球科学学院, 330013, 南昌; 3.广东国地资源与环境研究院, 510000, 广州)
0 引言
电力是我国安全生产与国民生活的重要基础,对输电线路的定期巡检是保障电力安全的重要措施之一。目前我国对输电线路巡检还是以传统人工巡检为主,然而我国输电线路覆盖广阔、地理条件复杂多变、部分地区气候环境恶劣的特点,给输电线路巡检工作带来了重大挑战[1-2]。近年来,通过无人机结合图像处理技术自动识别电力线上的可见异物成为热点,应用图像处理和模式识别等多种理论,可以提取异物区域悬挂的信息,从而有效提高输电线路巡检的自动化,弥补传统人工巡检的缺点,减轻巡检人员劳动强度[3]。
在日常输电线路巡检中输电线受到异物(如风筝、塑料袋、气球等)影响是电力安全的主要威胁,当异物悬挂在输电线路上,会缩短放电距离引发电路短路,造成电力能源输送中断,导致大面积停电。因此,如何完整、有效、快速地从航拍图像中识别异物成为重要的研究课题。在使用传统图像处理方法对电力线异物提取中,文献[4]提出了一种基于形态学改进的Otsu自适应阑值分割算法,采用改进的Otsu去除背景噪声,使用梯度法获取电力线边缘位置,再利用Hough变换分析线路数量达到识别异物目的。文献[5]提出一种基于线结构感知的输电线异物检测方法,在水平与垂直方向梯度算子获取复杂背景下线对象,对获取的线对象分段分析灰度、线宽来识别输电线上异物。传统图像处理方法的规则定义和参数配置均需人为参与,以致算法的自适应能力降低。近年来,随着深度神经网络的发展,各种神经网络模型也被应用在异物识别之中。文献[6]提出了一种简单有效的尺度直方图匹配方法,设计了基于有向包围盒回归策略的网络,准确预测复杂背景下外来物体的空间位置和方位角以达到检测电力线异物的目的。文献[7]提出一种改进胶囊网络模型对输电线路异物识别的方法,通过对电力线异物深度特征提取并改进主胶囊层和动态路由结构达到电力线异物的识别。由于电力行业的特殊性,电力线异物为小概率事件并且一旦出现,巡检人员会在第一时间内清除,以至于异物数据获取困难,并且国内外均无无人机航拍电力线异物的开源数据库,对于神经网络训练有很大的限制。
针对上述图像中电力线异物提取问题,本文提出一种关于电力线中线的异物检测方法。弥补数据获取困难与复杂背景的影响。首先,采用先验知识与最小二乘算法对电力线图像中电力线兴趣区获取与中心线准确提取;其次,沿电力线中线方向上观察像元的灰度变化通过阈值获取颜色显著的异物点,通过二值图像判断像元偏离电力线中心线距离进而辨别是否有颜色相近的异物;最后,采用RCF边缘检测和种子区域生长法提取异物范围。
1 感兴趣区的获取
在航拍图像中准确识别异物故障的前提是对电力线的识别和准确定位,例如断股检测、弧垂计算、覆冰厚度测量、危险交跨物距离测量等[8-9]。
本文采用Hough变换对图像中输电线进行提取[10],该算法是将电力线近似看为直线。然而无人机近距离实际拍摄的图像中电力线受下垂弧度影响在图像中是一条曲线,因此无人机近距离拍摄的情况下使用Hough变换方法拟合的电力线与实际曲线不吻合。本文在使用Hough变换获取电力线定位时,采用向其周围扩大20个像素点的方法来判定兴趣区,为输电线中心线的准确拟合奠定基础,如图1所示。

图1 获取兴趣区域结果图
2 拟合电力线中心线
图像分割是图像处理中最困难的任务之一,本文采用Sauvola自适应局部分割算法将图像分割为目标和背景两类,利用局部阈值分割的方法将目标和背景有效地区分[11-12]。首先通过兴趣区的获取减少了航拍图像背景复杂的影响,然后用5×5模板对兴趣区进行中值滤波处理,使Sauvola自适应局部分割算法能够消除剩余噪声的影响,保证最小二乘拟合曲线的准确度[13]。
(1)
式中:mean为动态窗口中像素灰度平均值,k为调整系数,R为灰度等级范围值。
在Sauvola算法处理的基础上用最小二乘算法根据目标中像素位置进行拟合,数学模型建立三次曲线,模型为y=a0+a1x+a2x2+a3x3,创建数组x、y,记录二值图中前景每个像素坐标,放入x和y数组。依据最小二乘法偏差平方和最小原则,计算各点到拟合曲线的距离之和,即偏差平方和为:
(2)
为求得符合条件的a值,对等式右边进行求导计算,得到的等式表示成矩阵的形式,后化简为范德蒙德矩阵为:
(3)
由式(3)转化矩阵计算得到了矩阵系数a0、a1、a2和a3同时得到拟合曲线,如图2所示。

图2 拟合输电线路图
3 输电线异物判断
3.1 灰度显著性异物点判定
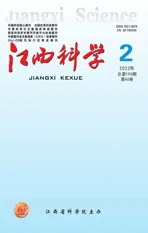
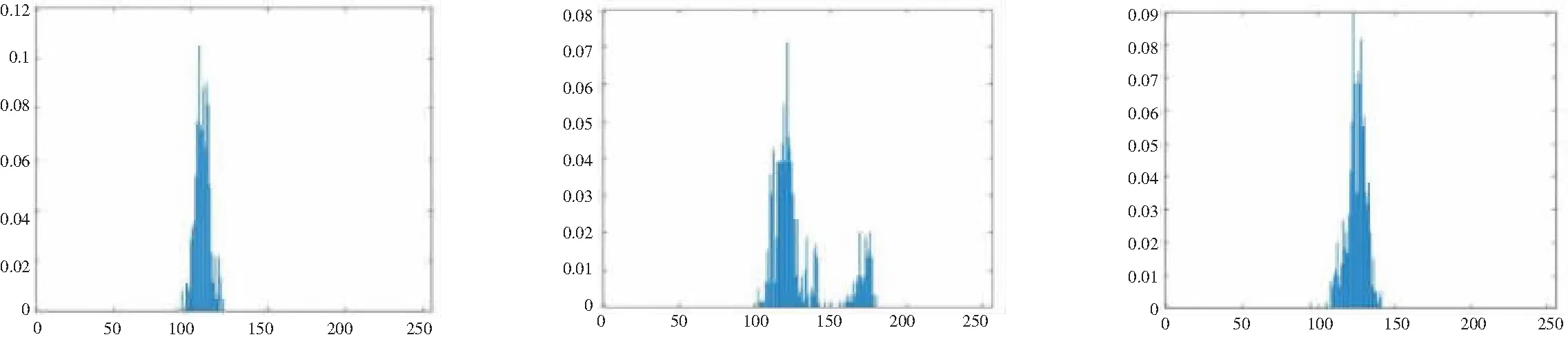
根据上述算法拟合出电力线在图像中是一组贯穿图像曲线,在实际生活中一条电力线为一种颜色,几乎不会出现一条电力线上有几种不同颜色,因此可以通过获取中线穿过像素之间的灰度显著性差异来判断与电力线上是否有灰度差异较大的异物。首先对图像进行灰度化处理,然后采用5×5模板进行中值滤波处理,消除数据采集时引入的噪声点,最后获取电力线中线穿过的像素灰度值。由图3(a)可知,拟合的第2条输电线中心线上部分像素灰度值偏离正常输电线灰度值,即证明输电线上悬挂有灰度显著的异物时,在沿着输电线中心线的方向上像素的灰度会发生剧烈变化。通过图3(b)可知,在中心线穿过像素点的灰度直方统计图中出现了多个峰值,因此设定中线穿过的像素直方统计图中最大峰值所代表的灰度值为T,设定该兴趣区电力线灰度值范围为[T-30,T+30],延电力线中线方向上连续3及以上的像素超出该范围即判定为异物上像素点,最终获取异物像素点坐标,判断结果如图3(c)所示。

(a)各中心线经过像素点灰度值
(b)各兴趣区输电线中心线穿过像素值图与灰度直方统计图
(c)获取显著异物点
中值滤波公式如下:
g(x,y)=Med{f(x-k,y-i),(k,i∈W)}
(4)
式中:g(x,y)为中值滤波处理后的图像,Med为动态窗口中像素中值,f(x,y)为原始图像,W为选定的二维模板。
灰度值公式:
gray=0.299R+0.587G+0.114B
(5)
式中:gray为灰度值,R为红色像素值,G为绿色像素值,B为蓝色像素值。
3.2 灰度相似性异物点判定
通过灰度显著性判断能够排除与电力线颜色相差较远的异物,但有些异物与电力线颜色相接近,因此异物处灰度值没有较大的突变。灰度显著性异物提取方法只能对灰度值相差30以上的异物进行了检测。本文利用欧式距离法判断灰度相似性异物,首先进行二值化,将电力线[T-30,T+30]范围内的像素值设定为1,其他像素值为0。然后进行连通域搜索,对图像像素从左到右、从上到下进行遍历。直到遍历完整个图像,并去除电力线中线不经过的连通域,达到滤除兴趣区内与电力线相似噪声目的。最后,用欧式距离遍历连通域像素点与拟合电力线中心线的距离,求出每个点到电力线中心线的最短欧式距离,设定所有最短距离平均值2.5倍以上为异常点,记录所判定的异常点的坐标,判定结果如图4所示。
欧式距离公式:
(6)
式中:f(d)为最短距离,aj为所有像素点坐标,bi为电力线中心线穿过的电力线。
4 基于RCF网络模型结合区域生长算法获取异物轮廓
通过上述方法判断了输电线上是否有显著性异物,为了对目标物体进行精准定位,需要得到目标物体的轮廓信息。本文利用更丰富的卷积特征(RCF)的精确边缘检测器提取图像内整体边缘[14],

(a)异物相似图像兴趣区

(b)获取相似异物点
该方法能够大幅度减少数据量, 在保留重要结构属性的同时, 剔除弱相关信息。
将BSDS500数据集[15]作为训练数据,它是一种应用广泛的边缘检测数据集,由200幅训练图像、100幅验证图像和200幅测试图像组成。RCF网络结构是通过修改 VGG16 网络结构得到的,RCF网络舍去所有的全连接层和第5个池化层之后,在每一阶段卷积后都设立一个Elewise相加图层,将该阶段所有图层相加融合,之后,RCF网络将每个阶段的累加图层融合,进行损失函数计算,这一改进使得RCF网络具有了混合输出,可以充分利用语义信息和良好的细节要素来进行边缘检测。图5显示了电力线异物图像在RCF模型中从上到下每个阶段的输出[16]。
RCF网络模型在设计损失函数时,将数据集中的每张图像,根据人工标记结果,产生一张边缘概率图,范围从0到1。0表示在这个像素上没有人标记为边缘点,1表示在这个像素上所有人都标记为边缘点,将像素点分为正样品点和负样品点。
损失函数为:
(7)

图5 RCF网络模型图

使用训练好的RCF的网络模型对原图进行边缘检测,获取整张像中整体边缘,以灰度显著性或灰度相似性获取的异物点作为种子区域生长点的种子来进行生长。按照规定的生长准则逐步将种子点与一定领域内符合生长条件的像素合并成一个子区域,这个子区域继续以该生长条件在一定领域内生长,直到满足生长条件为止,即获取了兴趣区内种子点在一定领域下迭代出的完整且独立的一个连通域[15,17]。
对于灰度图而言,生长准则一般设定为某个固定灰度阈值T,若种子像素与其邻域像素之间的灰度差小于T,则将其邻域像素纳入目标区域。即:
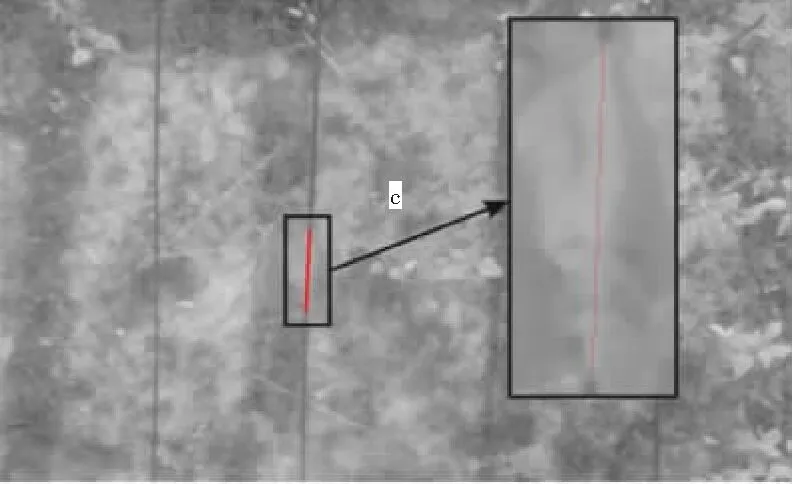
A[n]={(i,j)abs(g(x,y)-g(i,j)) |i-x|≤1,|j-y|≤1 (8) 其中:A[n]为目标区域,g(x,y)为种子像素,g(i,j)为g(x,y)领域像素。 具体步骤:1)使用BSDS500数据根据RCF网络结构进行训练;2)使用训练好的模型对图像进行边缘检测;3)对于显著性异物,使用灰度显著性异物点的作为种子点;4)对于显著性异物,使用灰度相似性异物点的中心点作为种子生长点;5)种子生长点利用公式(8)进行区域生长,灰度差T设定为30并对生长出的区域进行范围框标记,结果如图6所示。 (a) 灰度显著图种子区域检测 (b) 灰度相似图种子区域检测 利用本文算法对灰度显著性异物与灰度相似性异物两类图像进行处理。在电力线中线的基础上利用灰度值的显著性与相似性达到了电力线异物的完整提取,具体流程如图7。 图7 算法流程图 为验证本文异物识别算法的泛化能力, 选取50张样本,其中常见的异物样本鸟窝、风筝、气球、塑料袋各10张,不含异物的样本10张,将所有样本进行处理后识别并统计误识率,误识率表达式为 (9) 式中:Mr为误判率;Nerror为被错误分类的样本数;Nsum为样本总数量。 表1 误检识别率 通过批量实验发现,本文算法对鸟窝、塑料袋与电力线有较大的物理接触的情况下检测效果较好,但对于有些气球、风筝与电力线之间只靠一根细线悬挂,从图像中看几乎无物理接触的情况下不能将异物检测出来。原因是由于在该类情况下,顺着电力线中线的方向上检测不到灰度突变像素点,或存在1~2个突变像素点在滤波过程中被滤除。 本文提出了一种基于电力线中线的异物提取的新方法,实现了对不同颜色的电力线异物进行提取,该方法在事先检测到的输电线路兴趣区域内根据灰度图像的显著性与相似性,利用颜色和位置的特性获取电力线上异物点位置。相比于传统的异物检测方法,该方法对于电力线颜色相近的异物也能够提取出来,具有很好的实时性,并且提取出的异物具有较好的完整性。通过无人机采集的输电线路图像验证了该方法能有效提高对电力线异物提取可靠性,但验证数据较少。下一步拟打算收集大量电力线异物图像进行验证并且摸索针对细线悬挂异物的方法,提高异物识别准确率。
5 实验验证与批处理验证

6 结论