基于亮度优化的绿色隧道照明模糊PID控制算法
2022-05-06王海英毛明磊
王海英, 毛明磊,*, 何 佳
(1. 长安大学工程机械学院, 陕西 西安 710064; 2. 陕西交通控股集团有限公司,陕西 西安 710054)
0 引言
隧道是公路网络中重要的组成部分,截至2020年末,我国公路总长达519.81万km,其中隧道总长达2 199.93万延米[1-2]。隧道照明系统是隧道系统中必不可少的一部分,在隧道运营电费中,有80%的费用用于支付隧道中的照明用电[3]。目前,隧道照明控制大多按照《公路隧道照明设计细则》[4]采用分段固定照明亮度值的方法对灯具进行调光控制,因此,对隧道内部照明系统进行绿色节能控制,解决照明系统能耗高的问题,减少隧道日常运营开支是实现绿色节能的重要环节。
目前,国内外学者对隧道照明节能控制的研究主要集中在降低照明亮度需求和根据隧道内部车流量变化建立照明调光控制策略2个方面,旨在实现按需照明,避免无车或者车流量较小情况下的电能浪费。在降低照明亮度需求方面,Pea-Garcia等[5]和陆远迅等[6]分别采用在隧道入口周围种植常青藤或在隧道入口及出口处加装遮光棚,并在遮光棚内布置基本照明设施的方法,降低隧道出入口处环境亮度值以降低隧道内部照明亮度需求。张德钱等[7]利用Matlab对隧道内部各段照明亮度折减系数进行拟合以降低照明亮度需求。Yang Chao等[8]及秦慧芳等[9]建立了以隧道外部亮度、车流量及车速为输入,以隧道各段照明强度需求值为输出的模糊神经网络模型,对照明亮度需求进行优化。在考虑车流量变化建立照明调光控制策略方面,Qin Li等[10]及何威等[11]提出了“车进灯亮,车走灯灭”的控制策略,能在车流量较小时实现无车关灯,节省能源。秦莉等[12]及杜冠峰等[13]分别提出了以隧道内感知的车辆和亮度信息为输入,以隧道内部控制亮度为输出的PID调光控制系统和模糊PID调光控制系统,用于提高隧道灯具的调光速率,实现节能减排。
上述研究中,照明需求亮度的取值遵照《公路隧道照明设计细则》[4]的规定。根据规定,各个照明段的隧道照明亮度折减系数K按照固定区间对照取值设定,没有考虑与隧道内部车流量、车速之间的实时对应关系。此外,在灯具调光控制方面,不管是模糊控制还是PID控制,均采用车流量、实际亮度等环境指标作为输入量对灯具进行调光控制,仅考虑了控制目标的响应速度,而忽略了控制目标本身随着车速及车流量的实时变化特性。
本文针对隧道内部照明亮度需求值精细化控制问题,优化基于隧道内部车流量与车速的照明亮度折减系数K计算方法,得到按需照明亮度计算公式及控制目标值,并设计以控制目标差值与差值变化率为输入的模糊PID调光控制模型,精确控制隧道照明,同时在实际隧道中进行应用验证和行车安全验证,以期为更高效地实现隧道照明绿色节能控制提供一定的技术支撑。
1 绿色隧道照明控制系统
本文提出的绿色隧道照明控制系统原理如图1所示。照明控制系统由数据采集、数据处理与灯具控制3个模块组成。数据采集模块通过现场安装的隧道内外部亮度检测器、隧道车流量与车速传感器获取隧道内外部实时亮度值、进入隧道的车辆数量以及车速。各传感器通过RS 485总线与数据采集器相连接,并将所采集的数据传输至数据处理模块。数据处理模块的核心为现场安装的工控机,工控机根据测得的实时车流量、车速与隧道外部环境亮度值,并结合亮度折减系数K的优化取值方法来计算出隧道内部各段按需照明强度值,最后利用自适应模糊PID控制方法得到灯具的调光控制参数,对灯具进行调光控制。模糊控制器的输入为隧道内部各段实时亮度值与按需照明控制亮度值的偏差值与其偏差值变化率,输出PID控制参数Kp、Ki与Kd的变化量至PID控制模块,输出灯具的PWM脉冲信号至灯具控制模块的调光控制器。灯具控制模块由灯具调光控制器和隧道内部各段灯具组成,调光控制器根据接收的控制信号来对灯具进行调光,对隧道内部各段灯具进行绿色按需照明控制。

图1 绿色隧道照明控制原理
2 基于亮度折减系数K的按需照明亮度优化
《公路隧道照明设计细则》[4]中对于隧道内部各段照明亮度的设计分段如图2所示。细则中将隧道照明划分为入口段照明(TH1、TH2)、过渡段照明(TR1、TR2和TR3)、中间段照明(TN)以及出口段照明(EX1与EX2)4部分,其照明亮度要求分别为Lth、Ltr、Lin、Lex。

图2 隧道照明系统设计分段
2.1 入口段照明亮度优化
根据《公路隧道照明细则》[4],入口段亮度为入口段亮度折减系数K与洞外亮度的乘积。亮度折减系数K的取值如表1所示。
Lth1=K×L20(S) ;
(1)
Lth2= 0.5×K×L20(S)。
(2)
式(1)—(2)中:L20(S)为洞外亮度;Lth1为入口段TH1的亮度,cd/m2;Lth2为入口段TH2的亮度,cd/m2。

表1 不同车流量及速度下亮度折减系数K的取值
由表1可知,K按照设计交通流量和设计车速分段取值,并没有考虑实时车流量以及车速情况下K值的变化。因此,本文提出亮度折减系数K的线性拟合与线性内插取值相结合的优化方法,分别对实时车速及实时车流量下的K值进行优化,得到按需照明亮度控制指标,从而实现照明节能。
首先,根据表1中的已知数据,使用Matlab软件对大车流量和小车流量2种情况下不同实时车速的入口段亮度折减系数K进行线性拟合,得到2种车流量对应的入口段亮度折减系数KH和KL的拟合曲线方程,如式(3)和式(4)所示。不同交通流量下优化后的入口段亮度折减系数K与设计值对比见图3。由图3可知,拟合后的亮度折减系数值小于细则中的规定值。
KH=6.25×10-9v4-1.875×10-6v3+2.037×
10-4v2-8.875×10-3v+ 0.145。
(3)
KL=2.604×10-9v4-8.333×10-7v3+9.896×
10-5v2-4.667×10-3v+ 0.085。
(4)
式(3)—(4)中v为车辆速度,km/h。
式(3)和式(4)仅考虑了大车流量和小车流量2种情况下亮度折减系数与车速之间的关系,但对于中间车流量的不同未做区别。因此,进一步根据照明设计细则中车流量的设计取值,采用线性内插拟合法对处于中间的实时车流量所对应的亮度折减系数进行优化,如式(5)所示。
(5)
式中:N为实际车流量,veh/h;NL为实际车流量所属区段的小车流量,veh/h;NH为实际车流量所属区段的大车流量,veh/h。
将K代入式(1)和式(2)可以得到入口TH1、TH2段的照明亮度:
(6)
(7)
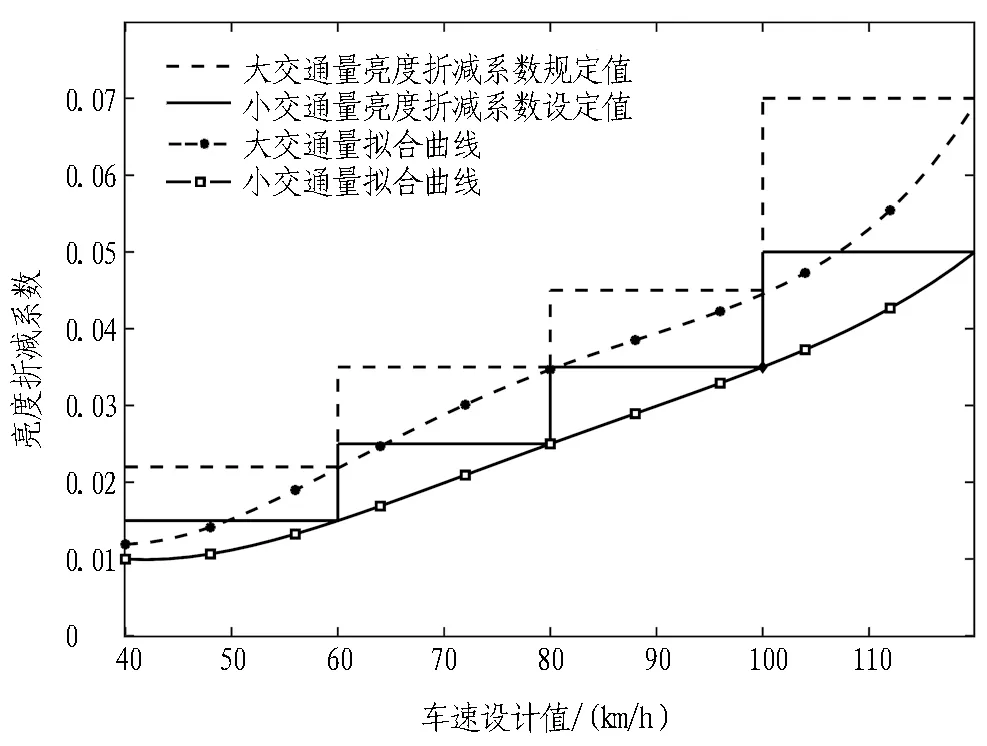
图3 不同车速与车流量下入口段亮度折减系数K的拟合曲线
2.2 过渡段照明亮度优化
《公路隧道照明细则》[4]规定,隧道过渡段照明亮度与入口TH1段照明亮度成比例关系,TR1段比例因子为0.15,TR2段为0.05,TR3段为0.02。在设计时,首先进行入口段亮度折减系数K的优化,然后通过比例因子计算隧道过渡段照明亮度。
2.3 中间段照明亮度优化
《公路隧道照明细则》[4]规定,中间段的照明亮度根据车速和车流量进行固定取值。与入口段类似,细则规定了不同设计车流量与车辆速度下的灯具照明亮度值,因此采用和入口段相同的拟合方法对中间段照明亮度进行优化。首先,利用曲线拟合方法,根据车速确定照明亮度;然后,利用线性内插取值法,根据实时车流量计算中间段按需照明亮度。中间段照明亮度优化拟合曲线如图4所示。
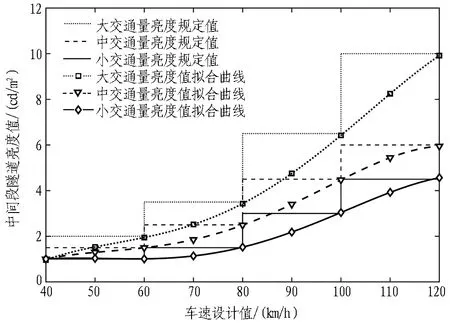
图4 不同车速与车流量下中间段的亮度值拟合曲线
不同车流量及车速的中间段照明亮度计算公式为
(8)
式中:LinH为中间段大车流量对应的照明亮度,cd/m2;LinL为中间段小车流量对应的照明亮度,cd/m2。
2.4 出口段照明亮度优化
《公路隧道照明细则》[4]规定,隧道出口段照明亮度与中间段照明亮度成比例关系,出口段1的比例因子为3,出口段2为5。设计时,首先进行中间段照明亮度优化后,再进行出口段按需照明亮度计算。
3 绿色隧道照明模糊PID控制算法及仿真
绿色隧道照明模糊PID控制器原理如图5所示。控制器的输入量为根据实时车流量、车速以及洞外环境亮度值计算出的按需照明亮度值,输出及反馈输入量为隧道内部安装的亮度传感器所采集到的隧道内部实际照明亮度值。计算输入量和反馈输入量的偏差值u(t)以及偏差值的变化率Du/Dt,将二者作为模糊控制器的输入量。PID控制器的3个参数为Kp、Ki、Kd,Kp为比例因子,影响控制系统调节速度的快慢;Ki为积分算子,目的是使系统消除稳态误差;Kd为微分算子,反映系统偏差信号的变化率,可以产生超前的控制作用。根据PID控制的3个参数Kp、Ki、Kd与偏差值u(t)以及偏差值的变化率Du/Dt之间的模糊关系,在运行时不断检测u(t)和Du/Dt,利用模糊推理的方法,在线输出Kp、Ki、Kd参数对应的变化量ΔKp、ΔKi、ΔKd,对PID控制器的3个参数进行自整定,然后利用模糊整定后的参数对进行隧道内部各段灯具进行PID控制调光。

图5 绿色隧道照明模糊PID控制器原理
3.1 模糊PID控制算法
模糊控制器用于对PID控制器的控制参数Kp、Ki、Kd进行自适应调整整定。进行计算时,首先对模糊控制器的输入进行模糊化,建立隶属度函数,确定各个模糊量之间的对应关系;其次,进行模糊推理规则设定;最后,进行模糊仿真,输出模糊整定后的ΔKp、ΔKi、ΔKd参数。
3.1.1 模糊化
模糊化是指经过对专家知识的利用,控制系统的被控量将输入的清晰量进行尺度变换,使其能够与各自的论域范围相匹配,从而实现模糊控制的一种控制方法[14]。
对输入变量的模糊化,首先需要确定偏差值u(t)与偏差值变化率Du/Dt的模糊论域。本文依托工程的隧道入口处的L20(S)值在白天时约为3 500 cd/m2,单向交通流情况下,根据式(5)可以计算出当车速为80 km/h时入口段的亮度折减系数K约为0.034 7,由式(6)计算出隧道入口段照明亮度Lth1为121.45 cd/m2。故设定偏差值u(t)的论域为[-120,120],在模糊控制中将其离散化为[-120, -80, -40 , 0, 40, 80, 120]。设定偏差值变化率Du/Dt的论域为[-60 , 60],PID控制器的参数修正量ΔKp、ΔKi、ΔKd的论域为[-3, 3]、[-3, 3]、[-0.3, 0.3]。


(9)
本文将模糊控制器Xfuzzy输入和输出划分为7个模糊子集{NB,NM,NS,ZO,PS,PM,PB}(即{负大,负中,负小,零,正大,正中,正小})。通过计算可以将实际的输入量与输出量转换为模糊输入或输出的模糊变量。
3.1.2 隶属度函数的建立
符合工程实际的隶属度函数可以充分发挥模糊控制方法的优势,通常采用专家经验法来构造隶属度函数[15]。本文根据专家经验构造出隶属度函数,模糊输入偏差值u(t)以及Du/Dt的隶属度函数如图6所示。

(a) u(t)隶属度函数(b) Du/Dt隶属度函数
3.1.3 设定模糊推理算法
在完成隶属度函数的设定后,根据专家经验来设定模糊规则。模糊控制器的输出为ΔKp、ΔKi、ΔKd,即PID控制的3个参数变化值。当u(t)较大时,为使系统具有良好的跟踪性能,在模糊控制中可以先增加Kp用于增大系统调节速度,减小Kd避免系统震荡,同时为避免系统响应的超调量,对积分算子Ki进行限制;当u(t)处于中等大小时,为使系统响应具有较小的超调,可以先减小Kp用于减小系统调节速度,Kd的取值影响较大,应减少增量避免系统震荡,同时积分算子Ki取值要适当;当u(t)较小时,为使系统响应具有较好的稳定性能,Kp、Ki取值均应增加,同时为避免系统震荡,Kd取值要适当,当Du/Dt比较大时,Kd减小。根据上述3个参数的特性及经验,设定模糊控制规则如表2所示。

表2 模糊控制规则
3.2 模糊仿真
利用Matlab软件对表2的模糊控制规则进行编程,计算得到ΔKp、ΔKi、ΔKd的模糊推理量;然后,采用重心法解可以模糊得到三者的精确量并用于PID控制。ΔKp、ΔKi、ΔKd的仿真输出结果,如图7所示。

(a) ΔKp的仿真输出
4 照明控制节能效果分析
4.1 节能效果分析
本文提出的基于亮度折减系数K优化的自适应模糊PID控制设计方法已于2020年1月在某高速公路隧道实施应用。该隧道全长2 205 m,双向6车道,设计速度120 km/h,2洞灯具采用对称布置,隧道内部的加强照明、基本照明和应急照明均采用LED灯具。隧道各段长度划分如表3所示。

表3 隧道内部各段长度
4.1.1 照明亮度值分析
首先,对入口段Lth1的照明亮度值进行对比分析,进一步根据照明亮度值进行节能效果分析。由于双向通行的隧道左、右洞照明存在着时间与方向上的不同,即同一隧道的左、右洞在相同时间存在着光照角度、车流量与车速之间的差异,因此,本文通过对比隧道单侧洞按照《公路隧道照明设计细则》和本文提出的基于亮度折减系数K优化方法计算的入口段Lth1照明亮度值的差值来分析节能效果。收集2020年1月10日—14日5 d的隧道洞外亮度L20(S)、通过隧道车辆车速以及车流量3个数据。5 d内隧道外部亮度的24 h检测平均值和隧道各时间段的平均车流量及平均车速如图8和图9所示。通过采集到的环境数据分别按《公路隧道照明细则》和基于亮度折减系数K优化后的方法计算入口段Lth1的照明亮度值,2种控制方法的照明强度对比如图10所示。
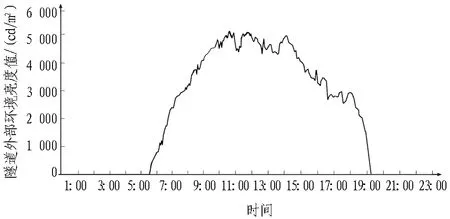
图8 隧道外部亮度均值曲线(2020年1月10日—14日)
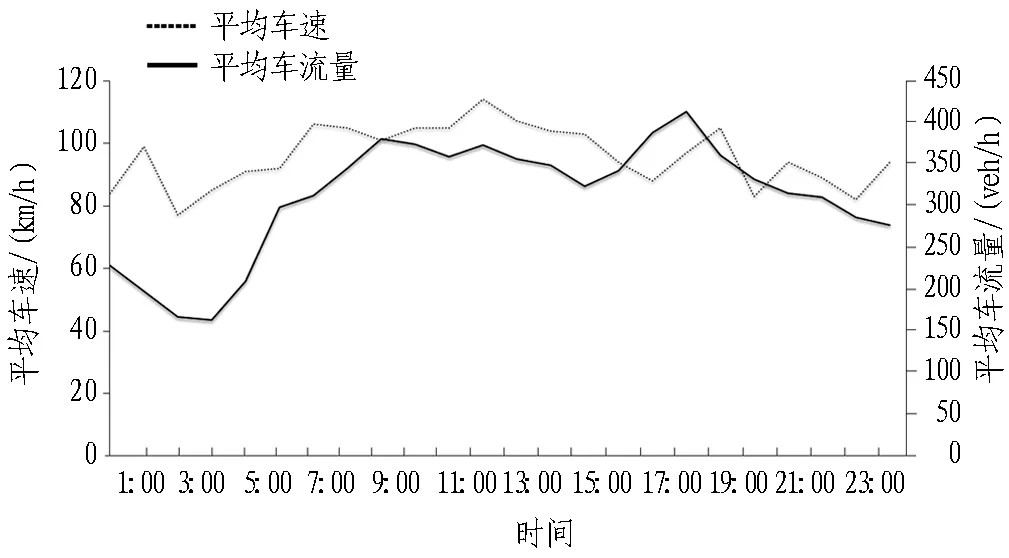
图9 隧道平均车流量与平均车速曲线(2020年1月10日—14日)

图10 2种控制方法的照明强度对比
由图10可知,本文提出的基于亮度折减系数K优化方法可以使隧道入口段Lth1的照明强度降低约26.7%,实现了节能的目的。
4.1.2 照明系统耗电量分析
隧道内部各段灯具布置数量及灯具相应功耗如表4所示。为评价照明节能效果,本文对采用基于亮度折减系数优化K的自适应模糊PID控制前、后的照明系统耗电量进行对比分析。2020年1月10日—14日,隧道内采用本文提出的优化控制方法进行灯具照明控制,并统计每日照明系统的耗电量。基于细则的隧道内部灯具照明强度需求值如图10所示,对应表4中的灯具类型及能耗,计算出在按细则规定下的隧道照明系统日耗电量。将计算出的日耗电量与隧道内部实际日耗电量进行对比,分析照明系统的节能效果。

表4 隧道内部灯具功率及其数量
2020年1月10日—14日,隧道单侧洞的日耗电量对比情况如图11所示。可以看出,在舍弃原有的根据细则规定的控制方法转而采用按需调光的模糊PID控制方法后,5 d平均耗电量节约了约21.2%,可以有效降低隧道照明系统的耗电量,节能效果明显。以上表明,本文提出的基于亮度优化的绿色隧道照明模糊PID算法效果良好。

图11 隧道照明系统耗电量对比
4.2 照明系统安全性验证
由于本系统对隧道内部照明进行适配性修改后,隧道内部照明亮度相应地有所降低,因此对隧道系统驾驶安全性进行验证,以验证本照明系统的照明亮度是否达到安全行车要求。
由文献[16]可知,驾驶员瞳孔面积变化率U的取值标准为: 1)舒适时U≤20%; 2)较为紧张时20%
根据文献[17]可知,U、K、v3者的关系为
U=-2.86+0.051 06v+276.8K-0.000 209 6v2-4.673vK-
1 783K2+0.020 1v2K+13.73vK2+4 121K3。
(11)
式中v取车辆在隧道入口段速度的平均值。
由式(11)可以计算出在不同设计车速下,U的安全阈值为20%时的亮度折减系数K的取值下限,如表5所示。

将表5与图3中数据进行对比,如图12所示。可以发现亮度折减系数K优化取值后仍然满足安全阈值U取为20%的阈值下限,因此可以认为亮度折减系数K优化取值后,仍可以满足隧道内部安全行车的前提。

图12 U取20%时亮度折减系数K
5 结论与建议
本文提出了一种基于亮度优化的绿色隧道照明模糊PID控制算法以实现隧道照明节能控制,并进行了照明控制节能效果验证分析,得到以下结论:
1)利用曲线拟合法和内插法,提出一种根据实时车流量和车速优化隧道照明亮度折减系数K的计算方法,得到隧道内部各照明段亮度折减系数K的拟合曲线和计算公式,实现了隧道按需照明亮度值的精细化设定。该优化计算的照明亮度需求值小于细则规定的照明亮度,隧道入口段Lth1的照明强度需求降低约26.7%。
2)设计以优化后的照明亮度需求为控制目标,以照明需求设定值与实际亮度差值u(t)与亮度差值变化率Du/Dt为输入的模糊PID控制器,实现照明精准控制。现场应用验证表明,5 d平均耗电量节约21.2%,且可以保证安全行车。
本文的研究成果主要在高速公路隧道进行了验证应用,后续可在照明亮度优化基础上进行不同照明控制算法方面的研究,以期获得更好的照明节能控制效果。同时,可以进一步在不同长度、不同断面宽度的隧道实践中对本文方法进行验证,以得到更全面、客观的照明节能数据,进一步推动隧道绿色照明的设计。
