机械手表虚拟装配系统的开发
2022-05-05李亚东
李亚东,文 领
(天津现代职业技术学院,天津 300350)
一、引言
机械手表作为精密机械计时仪器和装饰用品,实用性和装饰性是必须要具备的。机械手表应当走时准确、使用方便、工艺精细、外表美观和经久耐用,连续走时时间大于36小时,一些表还具有防水、防震、防磁性的功能。机械手表从简单三针系列到世界三大复杂手表陀飞轮、三问和万年历系列,其零件数量为60件~650件,表盘直径25mm~50mm,机芯厚度1.64mm~12mm。
虚拟现实技术是以计算机技术为核心的现代科技生成逼真的视、听、触觉等一体化的虚拟环境,并通过立体眼睛和数据手套等一系列传感辅助设备实现与计算机虚拟环境的交互、相互影响,使用户能够得到与现实世界一样的感觉。
由于机械手表零件数量多、尺寸非常小、工艺复杂和零部件容易损坏等特点,导致在实际培训或教学装配中,出现装配工艺难理解、零部件结构难观察、零部件损坏率高,因此很难提高装配质量和教学质量。利用虚拟现实技术将虚拟机械手表装配与真实环境装配相结合,创建沉浸、半沉浸的机械手表虚拟装配环境,对于培训和教学而言,可以提高装配操作人员的学习或工作效率。目前,EON Studio虚拟现实技术已经广泛应用在医学、娱乐、军事航天和教育等领域。EON Studio具有操作界面智能、节点功能丰富、模拟程序文件小、交互性好等优点。EON Studio 应用程序也可以与其他支持微软 ActiveX 控件工具相结合,如集成开发工具Visual Basic,利用Visual Basic中类的成员函数完成应用程序对EON Studio模拟程序的加载,实现对机械手表前阀部分、能源装置和传动轮系等八大部分中自动装配、自动拆卸、运动仿真、装配工艺和点油要求四个模块实时交互的目的。
二、 系统实现功能和设计方案
本系统包括前阀部分、能源装置、传动轮系、擒纵机构、振动系统、附加机构、整只机芯和成表总装共八大部分,每一部分均可实现自动装配、自动拆卸、运动仿真、装配工艺和点油要求。
本系统的设计方案:首先利用SolidWorks三维建模软件建立机械手表零部件三维模型,然后将建立的三维模型导入到EON Studio虚拟现实软件中进行设置,利用功能节点的模拟树(Simulation Tree)中阶层的安排和节点属性的设置,以及在流程控制视窗(Routes:Simulation)中逻辑关系的确定来实现功能节点间的互动,最后利用Visual Basic为集成工具进行机械手表虚拟装配仿真系统登录界面和仿真系统八大部分系统界面设计,实现利用Visual Basic应用程序对EON Studio虚拟装配模拟程序的加载,构成一个完整的机械手表虚拟装配仿真系统。
三、虚拟装配系统的设计
本文以海鸥搭载ST21机芯的机械手表为例,研究其前阀部分、能源装置、传动轮系、擒纵机构、振动系统、附加机构、整只机芯和成表总装八大部分中前阀部分虚拟现实装配开发的实现。
(一)三维模型的建立与导入
利用SolidWorks三维建模软件建立前阀部分柄头、柄轴、离合轮、定档簧、离合杆、拉档、拉档钉和拉档轴等零件的三维实体静态模型,按照装配规划序列先组装柄头部件、拉档部件和离合杆部件等部件,再组装前阀部分三维组件模型,并对模型进行材质、灯光渲染,增强前阀部分模型在虚拟环境的真实感。建立的机械手表前阀部分三维模型如图1所示。

图1 前阀部分三维模型
在EON Studio虚拟现实软件中,将Frame节点拖到Simulation Tree中的Scene之下,利用EON Studio中自带的SolidWorks插件将前阀部分三维模型导入Frame节点下,通过设置qianfabufen.SLDASM的Property Bar中Scale和Orientation的参数调整模型在EON Studio中的状态。在导入过程中,虚拟现实软件会对前阀部分三维模型数据进行压缩处理并重新计算,在模拟树视窗(Simulation Tree)中自动生成一个默认的前阀部分模型层次数据结构。为了便于后续的人机交互开发和运动控制,需要根据人机交互和运动控制的需求,重新构建符合逻辑的前阀部分虚拟模型的层次数据结构,对每个零部件模型的从属关系与父子节点进行设定。
(二)人机交互设计
通过传感器触发、路由机制和事件驱动等能够实现在虚拟现实环境中人与零部件之间的交互设计。ClickSensor、MouseSensor、TouchSensor和KeyboardSensor四种功能节点是EON Studio软件中常用的传感器节点,2DText2和2DImage2两种功能节点是常用的图形用户界面控制触发节点。利用事件输出收送区域和输入收送区域的EvenOut接口和EvenIn接口对功能节点之间进行逻辑连线,从而驱动功能节点之间进行消息传递,实现各零部件之间的逻辑控制。Place、Rotate、Motion和Position等节点是EON Studio中常用的运动控制节点。
当鼠标被按下或弹起时,触发OnButtonDown或OnButtonUp信号,由2DText2节点将信号传递给控制节点Place,通过设置x、y、z在Place节点中的位置大小来控制手表零部件沿x、y、z三维坐标方向上的移动和设置h、p、r的角度大小来控制手表零部件沿x、y、z三个轴旋转的角度。前阀部分人机交互设计如图2所示。
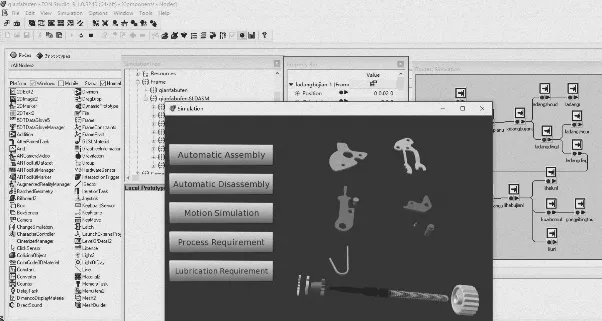
图2 人机交互设计
控制节点Place的运动仅限于父亲节点下的其他兄弟节点,应当对前阀部分每个模型的从属关系与父子节点进行设定。例如,在拆卸拉档部件的步骤中,运动节点应在拉档部件模型下,确保拉档、拉档轴和拉档钉一起运动。为了确保下一个零部件的装配必须在前一个零部件装配完成之后才能进行,必须让前一个零部件Place节点EvenOut接口的OnRunFalse与后一个零部件Place节点EvenIn接口的SetRun连接。利用Script节点支持的VBScript或JavaScript编写相关逻辑功能函数,能够实现对复杂机构的运动控制。
以前阀部分自动拆卸为例。首先,进行Place节点分配,将GUIControls中2D Text2节点拖到Scene之下,将Agent Nodes中Place节点拖到qianfabufen.SLDASM中离合轮部件、柄头部件、离合杆簧、离合轮部件、拉档部件、离合杆压片、定档簧和拨针轮零部件之下,为了对部件进行进一步的观察,要对部件再次拆卸,需要将Place节点拖到相应零件之下,例如,分别将Place节点拖到拉档轴和拉档钉零件之下。然后,对Place节点中Movement、Time to move、Type和Active进行设置,Movement是对零部件沿x、y、z三维坐标方向上的移动距离和沿x、y、z三个轴旋转的角度进行设置,Time to move是对零部件的移动速度或旋转速度进行设置,Type是对零部件相对或绝对的形式进行设置。本文选择相对移动或旋转形式,Active是对进入程序模拟时是否自动激活进行选择,本文选择不激活。最后,设置逻辑关系及串联和并联方式的选择,将2D Text2节点和Place节点拖到Routes:Simulation窗口中进行逻辑关系设置,串联方式的选择,为了确保下一个零部件的装配必须在前一个零部件装配完成之后才能进行,必须让前一个零部件Place节点输出三角形OnRunFalse与后一个零部件Place节点输入圆形SetRun连接。例如,离合杆压片拆卸之后才能拆卸拉档部件,则离合杆压片Place节点输出三角形的OnRunFalse应当与拉档部件Place节点输入圆形SetRun连接。并联方式的选择。例如,拉档部件移动之后需要对拉档和拉档钉尽心观察,需要将拉档和拉档钉并联在拉档部件之后,即拉档部件Place节点输出三角形的OnRunFalse应当分别与拉档和拉档钉零件Place节点输入圆形SetRun连接。前阀部分自动拆卸各节点逻辑关系设置如图3所示。

图3 逻辑关系设置
机械手表的装配,不仅有一个顺序问题,而且每一步装配都必须按照装配工艺规定操作,来保证各部分的装配质量,以便通过综合检验和调试来确保手表走时准确、工作可靠,且外观符合要求。为了培养学习者科学的操作方法,既提高机械手表装配产量又保证成表合格质量,按照装配规划序列设置ToolTip节点,当鼠标移动到相应零部件表面并单击时则自动显示对该零部件的装配工艺要求。例如,对拉档部件的装配工艺要求,按照手动装配要求,将ClickSensor、Place和ToolTip节点拖到相应零部件下。设置ClickSensor属性,勾选Change cursor when clickable方框,在手动装配过程中当鼠标移动到相应零部件位置时鼠标显示方式发生改变,提示可以装配此零部件,并从Click button中Left、Middle、Right和None选择一种。设置Place节点各项参数与自动装配中保持一致。设置ToolTip属性,在Enter ToolTip Text below方框中输入相应零部件的名称、装配要求和注意事项等装配工艺要求,勾选Change cursor when clickable方框和Click to display方框,当鼠标移动到相应零部件表面并单击时则显示对该零部件的装配工艺要求,在Routes:Simulation窗口中进行手动装配工艺模块逻辑关系设置。
(三)碰撞检测
在机械手表虚拟装配仿真系统环境中,零部件之间碰撞检测是仿真系统研究的一个重要的关键环节。为使机械手表零部件三维模型在虚拟模拟过程更加符合真实手表车间装配情况,各个模型之间必须确保不能够发生穿透现象,因此在虚拟装配系统中需要添加必要的实时碰撞检测。在EON Studio中,利用CollisionObject节点,将需要进行检测碰撞的手表装配零部件Copy as Link到CollisionObject节点下,并利用ColorCode3DMaterial和DirectSound节点,设置这两个功能节点的有关属性,当零部件之间碰撞发生时就会产生颜色变化和发出碰撞真实声音。
四、Visual Basic集成虚拟现实系统
以Visual Basic为开发工具集成机械手表虚拟装配仿真系统时,EON Studio提供了一个EonX的Active控件,EonX 控件具有一系列的属性、方法、事件,当把EonX控件添加到VB应用程序中时,其封装的类也同时添加上了,这时就可以方便地调用该类的成员函数与VB应用程序进行通信了。
设计机械手表虚拟装配仿真系统登录程序时,其程序的功能是实现当用户分别正确输入用户名和密码时,点击登录按钮就可以直接进入机械手表虚拟装配仿真系统主界面。
八大部分的系统主界面设计部分程序如图4所示,其程序的功能是实现当用户点击机械手表前阀部分、能源装置、传动轮系、擒纵机构、振动系统、附加机构、整只机芯和成表总装共八大部分任一部分的按钮时,系统就会完成对相应部分EON Studio模拟程序的加载。例如点击前阀部分,就会加载前阀部分自动装配模块、自动拆卸模块、运动仿真模块、装配工艺模块和点油要求模块共五大模块的内容。本系统八大部分主界面设计如图5所示。
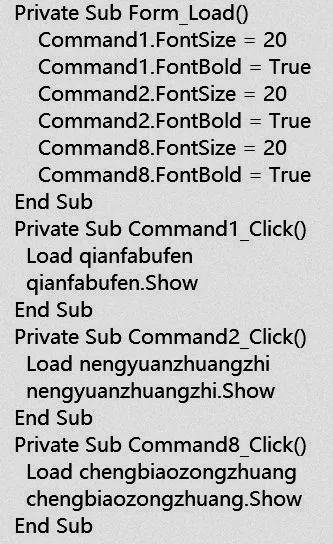
图4 系统主界面设计程序
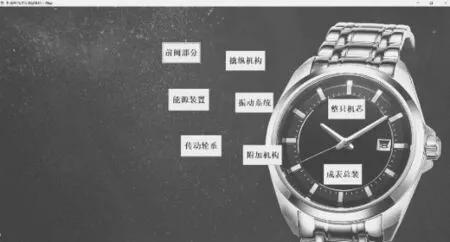
图5 系统主界面
五、结束语
本文利用SolidWorks三维建模软件对机械手表前阀部分、能源装置、传动轮系、擒纵机构、振动系统、附加机构、整只机芯和成表总装八大部分零部件进行建模、渲染和规划,基于EON Studio虚拟仿真平台对机械手表每一部分的自动装配、自动拆卸、运动仿真、装配工艺和点油要求五个模块进行虚拟装配的人机交互设计、运动控制和碰撞检测,运用Visual Basic设计系统登录界面和主界面,实现Visual Basic应用程序对EON Studio模拟程序的加载,集成机械手表八大组成部分,构成一个完整的机械手表虚拟装配仿真系统。该机械手表虚拟装配系统对促进实际机械手表装配与维修培训或教学具有重要的指导意义,降低了培训或教学成本,大幅提高了学员学习效率,切实提高了装配与维修质量,极大地降低了手表零部件损坏程度。