无人机LiDAR技术在水利崩岸应急测绘保障中的应用
2022-05-05李煜东
李煜东
(广东省水利电力勘测设计研究院有限公司,广东 广州 510000)
随着测绘遥感技术的发展,传统卫星遥感技术不断向着高精度、高分辨率、高时效性的方向发展。特别是在自然灾害发生时,一般传统测量手段无法快速获取有效、准确的地理信息数据。无人机激光雷达系统(LiDAR)作为一种先进的主动式遥感观测系统,可通过快速采集激光束在目标地物上反射的回波数据获取详细的地物三维信息,凭借其高效、安全可控、机动灵活、测量精度高、受外界干扰性小等特点,能作为应急抢险的先锋,可快速获取应急抢险时的第一手地形数据资料,更好地服务于水利工程抢险测量的需要。当灾害(如崩岸)发生时,如何快速有效获取地形地貌数据,及时给出有效灾害评估结果及处置结果,对水利工程建设安全保障和快速应急响应、人员撤离及后期抢险救灾具有十分重要的意义[1]。
1 无人机激光雷达测量系统
1.1 无人机激光雷达设备组成及原理
激光雷达(Light Detection And Ranging,LiDAR)是一种通过发射高频激光束来获取地面信息的主动式遥感系统,它是激光测距、全球定位系统(差分GPS)和惯性导航系统(IMU)三种技术结合的产物。其中,激光测距系统用于测量传感器到地表反射点的距离,差分GPS能够依靠地面基站GPS与激光雷达系统上的GPS进行差分得到准确的扫描中心空间位置,惯性导航系统能够用于获取扫描系统的空间姿态参数[2-3]。目前无人机平台搭载的激光雷达凭借着其全天时作业、受天气干扰小以及能够快速生成扫描区域地形数据且成果精度高的优点被广泛应用于应急测绘任务中。
1.2 无人机激光雷达技术突出优点
机载激光雷达是一种主动遥感技术,通过接收激光在地表物体反射的回波获取对象表面的三维信息,由此建立地表的三维模型。激光雷达具有快速性、穿透力强、全天时观测、高精度等优点。
(1)数据获取效率高,产品生产周期短。传统测绘测量效率低下、人工成本高,单兵作业慢且很多地方无法到达,即使达到安全风险过高,无法胜任应急测绘的需要。与传统航测成图相比,无人机LiDAR测量时只许布设少量地面控制点,且航线布设要求的重叠率低,飞行时间更短,相同容量的电池作业时,其效率更佳。且激光雷达扫描时是环形扫描,扫描范围更广,因此同样区域作业时,与传统航测时间对比,可以节省一半时间,提高了外业数据采集效率;其次,成图时间缩短,也节省了外业调绘和补测的工作量,可很好地应用于水利水电工程项目测绘任务中[4-5]。
(2)较大程度地克服了植被覆盖的影响。激光良好的单向性使其能从狭小的缝隙中穿过,扫描植被茂密地区时,每发射一束激光脉冲,可分别获得树冠、树干、地表灌木以及地面等多个反射回波[6]。虽然在植被密集区获取的地面点数量会减少,但是通过合理设置航线、增加重叠度、增强发射功率和调整扫描角度等措施,仍然可以获得满足大多数项目要求的地面点密度。对点云进行滤波和分类处理后,准确输出地面点和非地面点,再结合反射强度信息分类出地面、房屋、植被、建筑、桥梁、道路等要素。与传统方法获得的DEM相比,根据分类后的地面点生成的高精度数字高程模型,能反映出准确真实的地面高程信息,提高了地形图的准确性[7-9]。水利水电工程测区常常植被覆盖密集,获取真实地面高程困难,因此,无人机LiDAR技术相对于传统测量和航空摄影测量有无法比拟的优势。
(3)基于激光点云生成的测绘产品成果类型多,三维激光点云数据以及DSM、DEM、DLG可广泛应用于工程的规划设计、建设管理、三维建模等。生成的高精度DEM结合DOM影像可以直接获取水文断面、坝址和库区纵横断面、土方断面等信息,更加准确计算出水库淹没范围线和库容[10-12]。
2 无人机LiDAR技术在测绘应急保障中的应用
2.1 背景及概况
2021年5月16日,西江河段某江心岛正在建设的水利工程项目现场,江心岛上有一处边坡堤岸发生崩岸滑坡险情。整个崩岸长度约为150m,宽约90m,项目施工现场立即安排警戒人员划分警戒处,现场施工人员撤离该危险地区。项目现场相关负责人安排我司测量人员进行快速测绘获取险情段具体灾害风险程度及第一手测绘地理信息资料。我司携带相关作业设备第一时间到达现场,迅速组装好无人机后,航飞获取本工程地段的正射影像图、激光雷达数据,整个数据获取飞行作业时间约3h。
2.2 设备简介
大黄蜂BB4四旋翼无人机为华测定制版,惯导系统为Honeywell HG4930,采样频率为600Hz;激光扫描仪的型号为RIEGL_VUX_UAV,最大脉冲频率为550KHz,扫描角度为330°。AS-900HL激光雷达参数见表1。

表1 AS-900HL激光雷达测量系统主要参数
2.3 航飞设计与实施
无人机在进行航测之前,需要做好相关准备工作。首先,需要根据测绘任务、范围区域向当地所属空域管辖部门进行空域申请与报备;其次,踏勘现场环境确定起飞场地,把航飞范围导入三维地球软件,查看最高和最低海拔高度,确定分区和设计航高,利用航线规划软件进行航线布设。
准备工作完成后,架设好基站,安装好激光雷达设备,进行通电和开机。雷达数据采集前需要打开静态基站获取同步观测数据用于数据后差分,在作业前需要对激光雷达进行静置,设置好相关参数后即可开始,一般3~5min。按照设计好的航线进行飞行作业,作业时间为25min。
为了准确、高效、及时地获取灾害现场第一手可视化资料,本任务实施过程中还进行了摄影测量作业以便获取正射影像。采用的设备为大疆精灵4RTK,飞行作业时间为40min。测绘作业实施的飞行航线如图1所示。

图1 激光雷达航线和正射影像航线示意图
2.4 数据内业处理
采集完数据后,将所有相关数据导入并进行解算。激光雷达数据预处理是对激光雷达原始数据的整理过程,通过整合GNSS原始数据、地面站数据以及IMU数据生成地面激光点云,用于后续的地面处理和分类。图2表征了一般情况下激光雷达数据预处理流程。

图2 激光雷达数据预处理流程
对数据进行预处理后,检查数据范围足够、无航摄漏洞、轨迹解算、WGS84转20000国家大地坐标系参数准确无误后,生成所有点云文件las格式。导入Microstation数据处理平台,采用Terro Solid软件进行点云滤波、地面点云分类处理、高程点检核等一系列处理。同时将正射影像导入Pix4D软件进行全自动处理,得到DOM。将点云与正射影像叠加得到赋色后的彩色点云,可以更加直观反映出此次发生险情江心岛上的全部地貌。如图3所示。
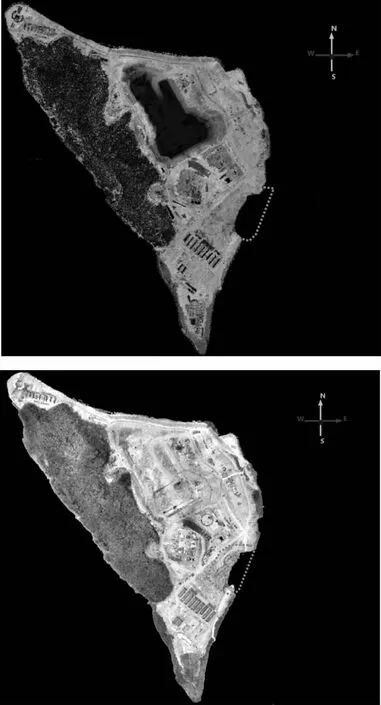
图3 激光点云和正射影像赋色后的激光点云模型图
2.5 数据成果精度对比分析
将解算完的点云同正射影像进行融合后对比,观察地物棱角与赋色后的点云平面位置,可以看出,正射影像与激光点云匹配良好,说明本方案采集的数据点平面精度正确,符合平面位置要求。一般地,激光采集点云高程精度难以保证工程测量精度需求,特别是植被覆盖茂密地区。因此,本任务也对此做了相关验证,用于检核LiDAR点云的高程精度。在项目外业数据采集中分别采集了平坦水泥路面、草地、树林等不同地方的RTK数据,均匀分布在测区范围内。通过对比分析,采集的地面点高程偏差都在5cm左右,具体高程精度检查报告见表2。
根据SL 197—2013《水利水电工程测量规范》中表3.0.5-5与GB/T 24356—2009《测绘成果质量检查与验收》中4.3.3节、4.3.6节、5.5.1节b)条规定要求,点云检查对比属于同精度检测,高程中误差均应小于±0.17m,从表2中可以看出,点云检查结果均符合规范要求。

表2 地面点云高程精度检查表 单位:m
3 崩岸塌方险情处理与分析
在崩岸塌方发生后,现场施工地已出现大面积坍塌区,沿河道路垮塌,具体灾害程度不明,项目现场相关负责人迅速启动应急预案,画出警戒安全线,现场作业人员与车辆避开危险区。我司测绘技术人员第一时间现场采集数据,当天通过第一时间对数据进行计算、分析,此次崩岸塌方的土方量约为30584.81m3,周边约9763.5m2区域处于不稳定松软区,岸坡滑动上下高度最大约为12.2m。将此次处理测绘成果信息提交给相关部门,用于研究分析崩岸发生的原因,并制定险情应急预案,进行安全风险评估后再进行现场填土加固与维护。
4 结语
文章主要探讨了无人机LiDAR技术应用于水利抢险应急测绘,当灾害发生时,利用无人机LiDAR技术可第一时间获取灾区详细准确的测绘应急资料。通过数据处理、比对、分析,其测绘成果可满足工程任务的需求。在作业效率上,极大地提升了测量人员在应急测绘中地效率,保障了人员及工程安全;在可靠性方面,激光点云与新型测绘摄影测量、遥感等方式相比,更适用于此类灾害分析与评估。
同时,利用好无人机LiDAR技术对专业人员能力要求高,恶劣天气无法适用,对于应急测绘保障来说,还需要借助其他的方式补充。随着无人机雷达向长航时、高性能、普适性等方面不断发展,LiDAR技术将在水利行业及应急测绘保障中发挥巨大作用。
