冬季韭菜管理、运输机器人设计
2022-05-05刘钰杰郭咏荃姜国振宋敬敬
刘钰杰,郭咏荃,姜国振,宋敬敬
(1.沈阳工业大学工程实训中心,辽宁 沈阳 110870;2.沈阳工业大学管理学院,辽宁 沈阳 110870;3.沈阳市汽车工程学校,辽宁 沈阳 110122)
种植反季节蔬菜是调节居民季节饮食环境、保障菜篮子供应的主要途径之一[1],其中冬季韭菜就是人民非常喜爱的餐桌蔬菜之一[2]。韭菜又名懒人草、草钟乳、扁菜等,属于百合科多年生草本植物,具有抗寒、耐热、抗虫病等优点[3]。冬季韭菜在山东潍坊地区广泛种植,以夏天管理、冬季依靠保温棚使其反季节生长然后收割韭菜为主要方式,为保证韭菜生长均匀,拉长收获期,韭菜保温棚一般以窄、低、长为主。本文以潍坊地区某乡镇种植棚为例,宽度为2.5 m左右,高度为1.1 m左右,长度根据地块决定,一般大于40 m,如图1所示。如此狭长的环境中,农民在棚里工作,受棚内空间限制,完成弯腰运输、跪地翻土、爬行喷药等工作,严重影响身体健康。近年来,新机具、新技术被广泛应用于蔬菜生产各环节[4],设计一种专用于冬季韭菜管理、运输的机器人以减轻农民的体力劳动十分有必要。

图1 冬季韭菜棚
1 冬季韭菜棚内部空间及土地状态研究
1.1 冬季韭菜棚的内部空间
韭菜棚内部空间的合理测量是机器人设计的首要工作。北方韭菜的种植一般为起垄栽培,垄栽10行,行距250 mm左右,垄的宽度为2.5 m左右[5]。韭菜根属于弦线根的须根系,没有主侧根,主要分布在100 mm~300 mm深的耕作层[4]。秋天天气转凉之后,需要搭建近半圆形韭菜棚将韭菜垄完全覆盖,如图2所示。韭菜棚的最大宽度一般为2.5 m,韭菜垄的中间需要做立柱将棚内竹批顶起至1.1 m的高度,防止被保温草帘和大雪压塌,立柱一般选用直径为80 mm的圆木或50×100 mm的水泥柱,使用圆木的韭菜棚较多;韭菜棚上每隔1.2 m会有立柱顶起竹批来支撑整个棚膜;韭菜棚出口一般为棚截面的3/5。
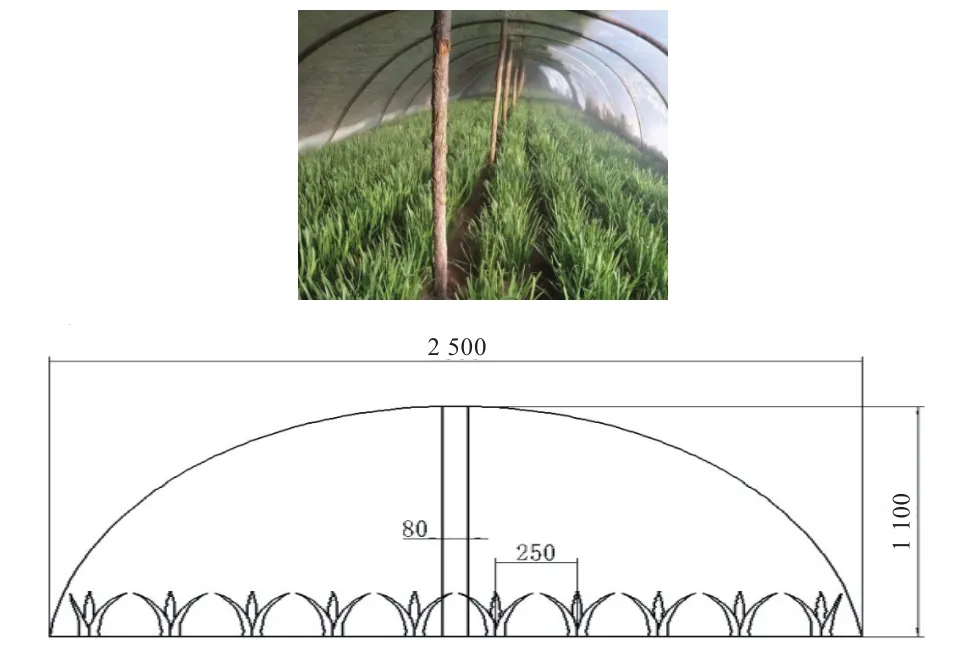
图2 冬季韭菜棚结构图
1.2 割韭菜前后土地的变化情况及处理
冬季培育韭菜之前首先用旋耕机将土打散,再在处理干净韭菜枯叶的土地上盖上50 mm~80 mm的覆土,此时土质较为松软,有利于韭菜穿破土壤长出新叶。进入收割时,需要农民进入大棚中收割打捆,在收获头刀韭菜的过程中,不断踩踏松软土质,泥土会变硬甚至轻微板结,此时机器人在较硬的土地上载重运输,受到的阻力相对较小,但会进一步加大泥土板结的程度,泥土板结后二刀韭菜的茎叶受泥土阻挡无法长出,这时需要机器人携带翻土装置将土地翻松即可。二刀韭菜生长过程中因棚内温度高、湿度大、有割口影响会产生灰霉病,需要喷洒药剂防止韭菜溃烂。
2 机器人整体方案设计及主要技术指标
2.1 整机结构
机器人的整体方案需要满足机器人所使用的空间环境、地面环境和具备的功能。冬季韭菜运输、管理机器人由机器人本体、翻土装置和撒药装置组成,如图3所示,机器人本体与翻土装置和撒药装置可以单独装配使用,根据韭菜生产活动的不同选择相应的组合。机器人本体可单独运行完成在狭长棚中运输韭菜的工作;机器人本体与翻土装置组合可完成土壤的翻耕;机器人本体与撒药装置也可单独配合,完成撒药工作;机器人本体上留有与翻土装置和撒药装置以及电气控制的接口,方便快速安装调试。

图3 机器人整体设计方案
2.2 工作原理
机器人本体设计整体较矮,总体高度200 mm,宽度450 mm,在运输韭菜过程中,装韭菜的筐高度500 mm,加上本体总高度为750 mm,如果机器人本体继续加高则在运行过程中会撞坏上方韭菜棚的结构。机器人运行时两侧距离棚边及立柱有一定距离,机器人本体离立柱的距离为150 mm~450 mm,否则会出现运行碰撞的现象;机器人电池仓及控制系统采用下沉式设计,不占用机器人工作平台;机器人的行走机构充分考虑在土地较为松软的环境下工作,首先考虑设计的结构为履带式,但是履带式结构成本较高且结构复杂,维修和养护较为困难,农机具的设计应首先保证实用性与可靠性[6];因此创新行走机构,采用单侧两轮同驱结构,一个电机通过链条就能驱动两个轮子,减少电气元件,提高可靠性,降低成本;翻土装置是多个翻勾并排,利用直动推杆推动机构深入土层,将土翻松;撒药装置由药桶、药桶固定装置、高压泵以及防刮喷药杆组成。
2.3 主要技术参数
韭菜管理、运输机器人技术参数如表1所示。
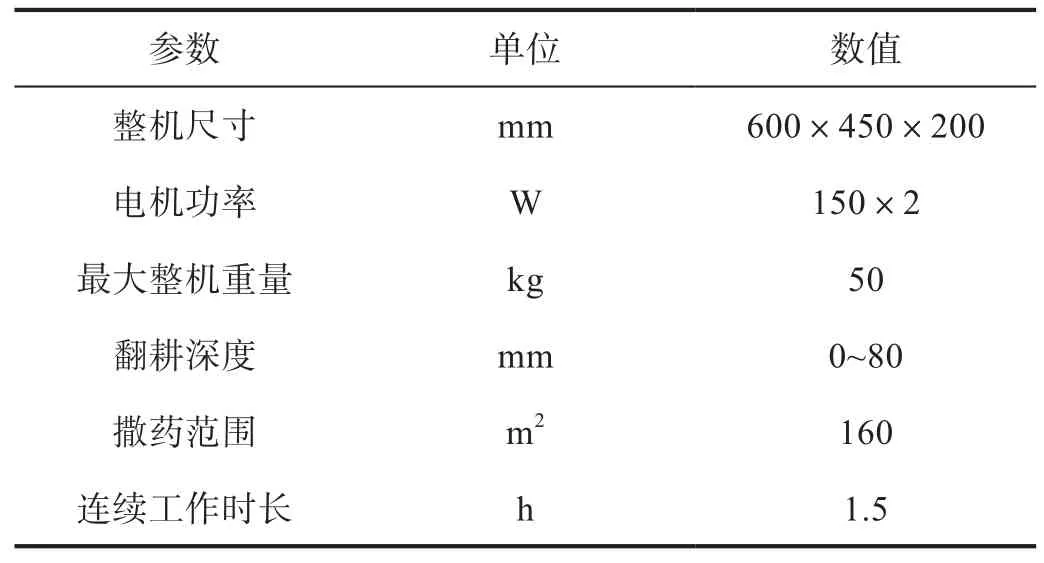
表1 冬季韭菜管理、运输机器人技术参数
3 主要工作部件设计
3.1 机器人结构设计
机器人在运输韭菜、翻松土地和撒药工作过程中,需要在松软土质上进行,在松软土地上运行最好的为履带式结构,但其结构复杂、可靠性差、维护不方便,并考虑成本等因素,在本设计中不能使用,因此根据土地的实际条件采用单侧两轮同驱结构,其能够代替履带式结构,整个结构如图4所示。单侧的两个轮子7的动力来源于电机1,电机1将动力输出经过减速器2提高扭矩后,使轮轴3运转,轮轴3上通过键带动链轮4与轮子7同时转动,链轮4上挂有链条5,链条通过小链轮6的张紧带动另一侧的链轮4转动,链轮4与轮轴3通过键连接,轮轴3与轮子7连接,实现同步转动。
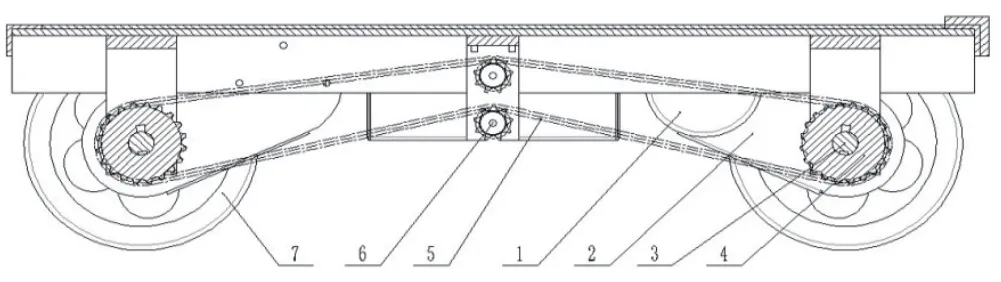
图4 单侧两轮同驱结构
整个机器人底盘有四个轮子、两个驱动同时控制,运行原理与坦克类似,可以实现直线行驶(双向)、左右转弯和原地打转等运行动作。根据两侧同驱结构的差速进行转向控制和曲线运动控制,转动的方向和曲线运动的半径可通过两轮旋转方向及两轮的速度差Δv来得到[7],机器人运动学模型如图5所示。
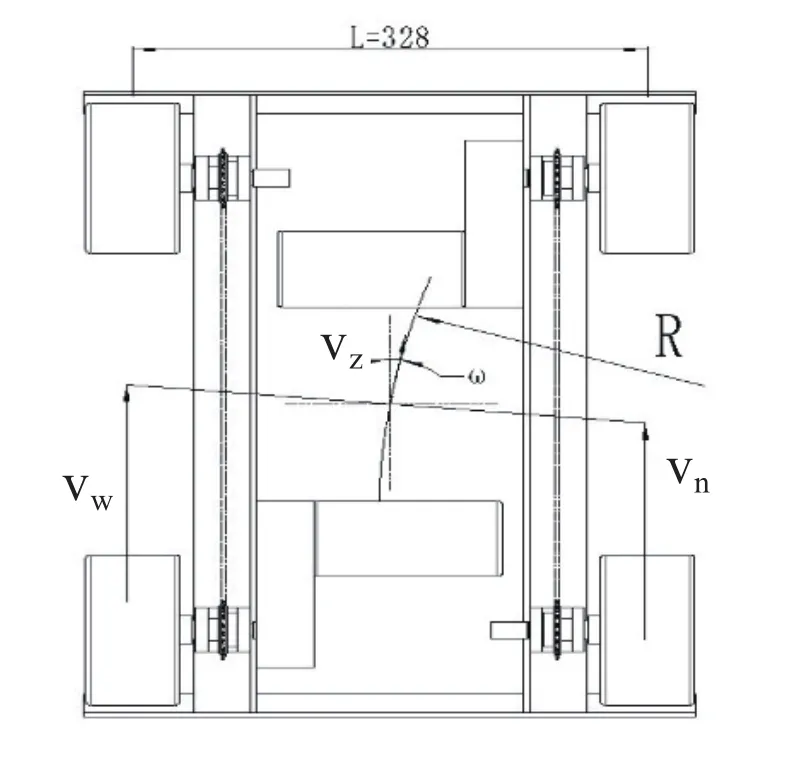
图5 机器人运动模型
假设机器人正在做转弯运动,由运动学可知:

上式中,vz为合速度即机器人运行中心的速度,vw为转弯方向外侧轮速,vn为转弯方向内侧轮速。

上式中,ω为曲线运动角速度,L为两个单侧两轮同驱结构的轮距。由式(1)和式(2)可得曲线运动的转弯半径R:

根据式(1)、式(2)、式(3)得,当vw=vn时,机器人的运行速度vz=vw=vn,转弯半径R=∞,机器人实现直线行驶。当vw=-vn时,转弯半径R=0,机器人原地打转。当vw≠vn和vw≠-vn时,机器人根据速度的差值,按照半径R旋转。
3.2 翻土装置设计
翻土装置主要由多齿翻土耙1、旋转铰链2、电动推杆3和推杆支架4组成,如图6所示,主要对被踩踏板结的土壤进行翻松。其工作原理如下:多齿翻土耙1通过旋转铰链2与车体连接,且多齿翻土耙1能绕旋转铰链2转动,转动通过电动推杆3推动,电动推杆3一端通过推杆支架4连接到机器人本体。工作中的机器人进入棚中时电动推杆3收回,多齿翻土耙1随之上扬,不会插入土地,进入棚中后,通过控制系统使电动推杆3伸出,连接的多齿翻土耙1回绕着旋转铰链下插,电动推杆3的推动力为1 400 N,能够克服泥土阻力,多齿翻土耙1的翻土齿长为120 mm,插入土壤中的深度大于50 mm,控制机器人运行将棚中泥土翻松。
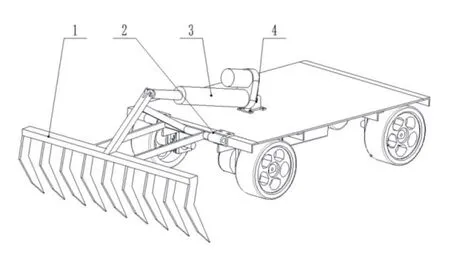
图6 翻土装置结构
3.3 撒药装置设计
撒药装置主要由喷雾杆1、药桶固定套2、药桶3、高压泵4组成,如图7所示。机器人背有药桶,药桶通过药桶固定套固定于机器人本体上,药桶固定套上安装高压泵,高压泵的进水端通过水管与药桶连接进行吸水,高压泵的出水端通过水管与喷雾杆连接,实施喷药工作。
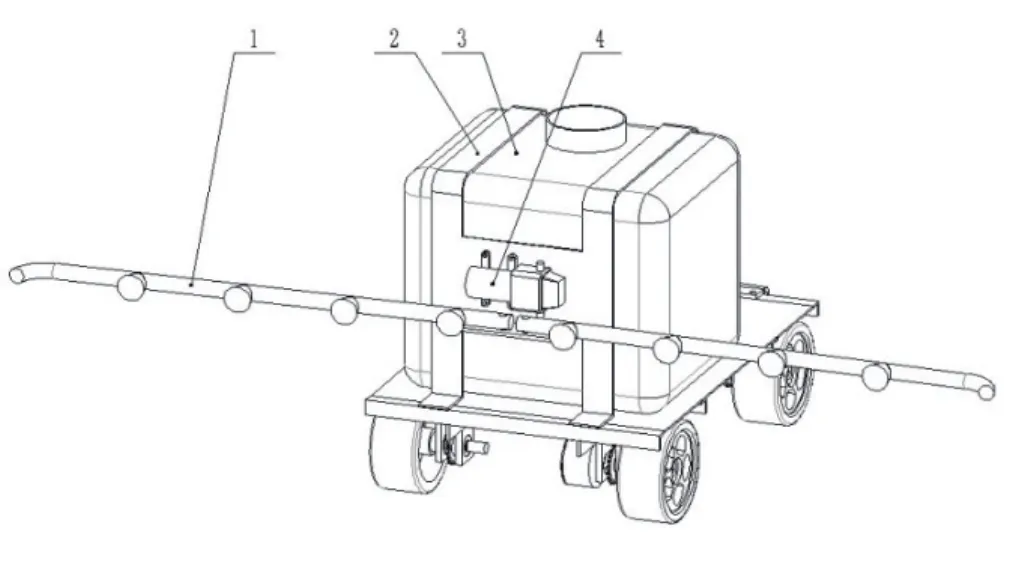
图7 撒药装置结构
4 自动控制系统设计
控制系统主要由人机交互、执行装置、主控系统和安全管理四大部分组成,如图8所示。人机交互由SP2手柄对机器人进行控制,对执行装置发出控制信号,一键启停可保证机器人在遇到 危险时及时停机,保护操作人员安全并减少危害与损失[8-9];主控系统接收人机交互和安全管理的信号,并进行判断和处理,控制执行装置执行相应动作。
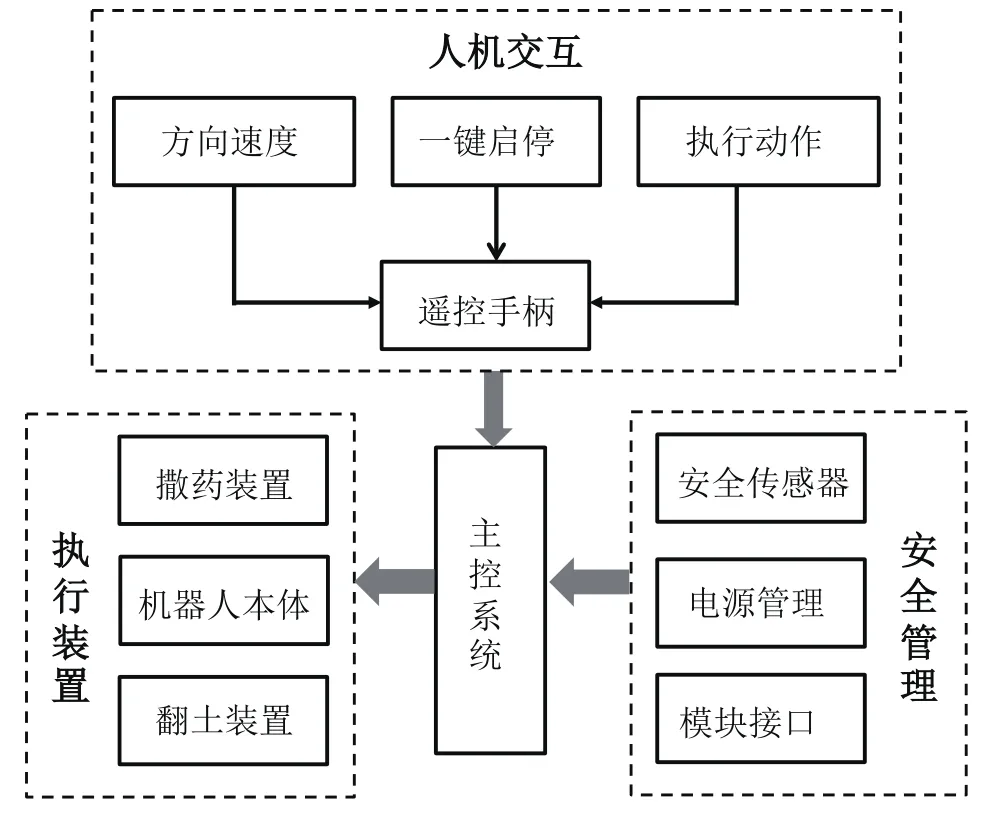
图8 翻土装置结构
5 结论与分析
综上所述,蔬菜规模化、产业化发展的关键在于机械化和智能化收获,以取得更快的上市时间,获得最大的经济效益[10]。研究小组针对冬季保温棚韭菜管理运输的实际情况设计了此款机器人,主要包括机器人本体、翻土装置、撒药装置和控制系统四部分。根据使用环境,可以单独使用机器人本体运输,运输重量达到70 kg;翻土装置和机器人本体结合进行土壤翻松,翻松深度最大达到80 mm,一遍翻松土壤便达到韭菜生长的条件;机器人和撒药装置配合对韭菜农田进行撒药工作,单次撒药面积不低于160 m2,且喷施的均匀程度与人工喷施均匀程度一致。冬季韭菜管理、运输机器人能够辅助农民的田间工作,减轻农民的体力劳动,促进冬季韭菜的田间管理标准化,进而提高韭菜产量。
