激光扫描技术在高速公路改扩建中的应用
2022-05-05李锦明
李锦明
(广东省交通规划设计研究院集团股份有限公司,广东 广州 510000)
1 引言
沈阳至海口国家高速公路茂名至湛江段(以下简称“茂湛高速公路”)是国家7918 高速公路网中第二条南北纵线——沈阳至海口高速公路重要组成部分,自2005 年9 月建成通车以来,随着经济的快速发展,交通量快速增长,通行量达到或接近高速公路所能适应的通行能力,现有通行能力逐渐不能满足社会经济发展对交通运输的需求。因此,开展茂湛高速公路的改扩建工作非常必要,且十分迫切。
茂湛高速公路改扩建项目需对旧路的桥涵、原路面等进行详细测量及调查,内容繁杂;设计周期短,测量时间少,给项目各个阶段的测量工作带来了极大挑战。传统测量技术手段采用GPS-RTK、精密水准测量的方法,工作量大、效率低且存在重大施工安全风险,因此不适用于茂湛高速公路项目的改扩建。激光扫描技术作为一种全新的数据获取手段,具备数据采集快、自动化程度高、安全性好等特点,能够满足高速公路改扩建的要求。
2 激光扫描技术在道路勘察设计中的应用分析
机载LIDAR(Light Detection and Ranging)是激光探测及测距系统的简称,集成了GPS、IMU、激光扫描仪、数码相机等光谱成像设备。其中主动传感系统(激光扫描仪)利用返回的脉冲可以获取探测目标高分辨率的距离、坡度、粗糙度和反射率等信息,而被动光电成像技术可获取探测目标的数字成像信息,经过地面的信息处理而生成逐个地面采样点的三维坐标,最后经过综合处理得到沿一定条带的地面区域三维定位与成像结果。
机载激光雷达测量精度取决于激光雷达的激光器的校对和标定、飞机的飞行高度和速度、GPS/IMU 系统精度、激光器类型、斑点大小[1]。 机载激光测量系统组成如图1 所示。
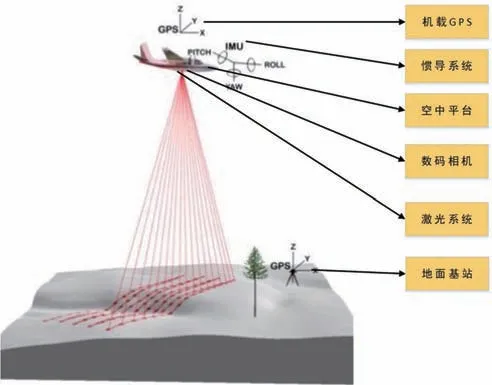
图1 机载激光测量系统组成
三维激光扫描仪采集的数据,其表现形式是矩阵,并且每个矩阵单元获取的是目标结构的表面三维点,矩阵单元值是三维点的坐标值。三维激光扫描仪对目标物体进行扫描,获取目标结构物上的空间点坐标,多个目标的点集合即“点云”(Point clouds)。三维激光扫描仪获取的数据成果如图2 所示,包括了目标物体的三维坐标(X,Y,Z) 、反射强度(intensity)、颜色(RGB)和影像信息等[2]。

图2 雷达点云数据成果
2.1 数据获取
项目实施前需要布设GPS 参考站,并做好设备检查和系统测试工作。布设参考站要准确测量站点坐标,确定好参考站之间的距离;在检校航线(如图3 所示)工作中,AB、EF 为双向对飞航线,而CD 则为平行飞行航线,布设检校方案时需要将与相邻航线重叠部分的范围控制在30%~50%;根据公路勘察设计项目条带状的基本特征,进行分区域摄影,确保同一航带范围内的高差保持在一定范围内,确保点云的密度以及精度[3]。

图3 检校航线
2.2 数据处理
LIDAR 数据处理主要分为几何地理定位和滤波分类两大部分。
(1)轨迹线解算、点云解算配准
主要进行几何定位处理,通过定位数据的差分处理,IMU 姿态确定、校正和配准、坐标变换等过程,结合LIDAR 数据实现激光点的三维坐标解算。
(2)激光点云精细分类
激光点云精细分类也就是滤波分类,对于公路项目来说,最重要的就是从纷杂的激光点云中分离出地面点,为公路设计人员提供准确DEM。点云分类成果分为两类,一为初步分类成果,即经过预处理和成果精度的初步检验,将噪声点完全剔除,通过算法分类地面点,经常用于方案研究阶段、地形图制作、快速正射影像制作和地形图调绘等;二为精细分类成果,基于初步分类成果,编辑处理形成精细化点云模型,构建规则合理的地面点云模型,能够清晰描述沟坎处等地物特征形状,可以真实表达测区地理信息,一般用于矢量绘图、断面提取、土石方计算、三维模型制作等[4]。
2.3 质量检查
质量检查主要为激光点云内符合检查和外符合检查。激光点云内符合检查主要是检查不同时间采集的统一区域的点云匹配是否满足要求。外符合检查就是通过野外实测一些控制点来检查激光点云数据与实地是否匹配[4]。
2.4 应用分析
快速、精确、高效地获取项目激光扫描数据信息,满足改扩建公路施工图设计精度要求,可替代传统测量手段,保证作业安全。原始数据经过二次精化后可作为高速公路改扩建的基础资料,满足了高速公路改扩建路面施工图设计的需要。
(1)能够勘察设计不同阶段线路区域中的DEM、影像图以及相关的地形图,同时利用LIDAR 系统获取密度较高的点云数据,从而有效生成DSM、精度较高的DEM 以及比例尺较大的地形图,为前期公路勘察提供一定的参考数据。
(2)利用LIDAR 系统能够为公路设计工作者提供更真实、更直观的三维浏览场景,制作出真三维模型,能够实时检测道路设计的效果,有效获取影像并建立模型,以便对周边的高速公路和周围地物进行识别,从而直观监控高速公路和周围环境。
(3)可以为规划和扩建工作提供基础数据。LIDAR系统具有的高程数据能够为扩建和规划工作提供相应的三维数据,而且这些数据的密度较高,不需要内插计算,即可直接获取图内任何一点的平面坐标和高程坐标,且精度较高,以便后期公路规划以及扩建工作的开展[5]。
3 激光扫描技术在茂湛高速公路改扩建中的应用
激光扫描技术可以在高速公路改扩建工程中实现路面高精度数据精化改正,基于多源异构融合数据进行高精度数字模型制作,还可以基于三维数据进行工程关键要素/部分的精准提取,建立高速公路测设工程的新模式。
3.1 基于激光扫描的改扩建工程路面高精度数据精化改正
本项目采用激光雷达扫描的主动测量方式进行外业数据采集,作业自动化程度高,无需人工进入快车道,能够实现不干扰正常交通流的既有道路信息采集,安全且高效。
为了获取路中路面特征线的高精度高程数据,首先利用电子水准仪沿路肩每隔100 米左右测量一个标靶点,并与水准控制测量统一平差计算,得到精准的水准高程;划定路中路面的范围线,并从经过首次精化后的激光点云数据中提取道路路面范围的点云数据,利用水准高程点对已有的路面点云数据进行高精度二次改正。
二次改正后的激光点根据高速公路平纵面线型变化规律和高程变化的平顺情况及数模高程变化进行人工判别点云的正确性,并及时进行修正;密集提取纵断面,加上自动化的人机可视化交互,根据高速公路路面纵断面线型变化的规律,利用Excel 计算纵断面相邻高差进行检查,利用半自动化人工干预剔除错误数据,最终得到满足要求的路面数据,经抽检,精度达到高程中误差为0.014m,完全满足高速公路改扩建施工图设计需要。
3.2 海量多源异构数据融合的高精度精细数字高程模型制作
高速公路改扩建项目的精细数字高程模型利用了电子水准仪测量数据、高精度测量的GNSS-RTK 实测数据、高精度测量的全站仪测量数据、改正后的激光点云数据、路面高精度二次精化的点云数据等多源多种数据,通过计算机编程自动化处理,按照精度高低次序进行融合计算利用,进而形成实测数据的点集及线集(实测的密集高程点、路边、沟坎等);然后,结合分离后的激光数据和二次改正后的高精度路面模型,通过一系列的运算处理,经过删除、修正和融合形成最终的高精度精细数字高程模型。该模型的应用不仅能够满足现阶段的勘察设计需求,经过一定的格式变换还可以直接进行BIM 建模的应用,为后续BIM 技术在施工过程中的应用,如施工信息管理、BIM-4D 施工进度管理等一系列BIM 应用,奠定了坚实的基础。
3.3 高速公路改扩建工程关键要素精准提取
针对激光雷达技术的非接触式主动测量特点,利用其正射影像图DOM 数据和实测边线数据对道路中线进行拟合并提取;同时对既有桥梁等结构物的关键要素进行高精度获取,采用独立的测量数据编码对既有桥梁桥台平面位置、台前台背、桥墩柱、垫石、横梁、梁底高程等关键要素进行单独提取,在测量成果中独立分层建模。该项技术能帮助不同专业的设计人员快速获取各自所需的基础数据,大大提高了与设计的协同作业效率。
3.4 建立高速公路自动测设新模式
该项目在定测过程中最大程度减少了人工干预,实现了定测阶段纵横断面测量的测设数据处理自动化作业模式。与传统纵横断面方法相比,新的方法在作业流程中减少了人工干预,避免了全站仪通视困难等问题,精度均匀可靠。在定测路线调整后,补测横断面过程效率极高,充分利用了项目前期的测量成果,避免了大量的重复测量。新方法施测过程灵活,避免了传统方法必须等全部路线稳定后方可实施的劣势,可以灵活分段采取先测稳定路段后测其他路段的方法,提高了公路测设的工作效率,既保证了作业人员安全,节省了工程建设成本,又为勘察设计工作争取了大量时间。
4 结论
本项目采用的基于激光扫描技术的改扩建工程路面高精度数据精化、基于北斗和激光扫描等海量多源异构数据融合的高精度精细数字高程模型、高速公路改扩建工程关键要素精准提取技术,将测绘行业的多项先进技术相结合集成在公路勘测中。特别是激光雷达扫描技术在高速公路改扩建项目中的应用,极大缩短了项目整体建设周期,最大程度上保证了作业人员的安全,在保证质量的前提下提高了工效,提升了社会经济效益,全数字化作业的同时减少了外业时间,减少了对环境的负面影响[6]。
