基于stm32的二便护理机器人设计
2022-05-05陈新宇胡冰山苏颖兵喻洪流陈兆曦
陈新宇,胡冰山,苏颖兵,陆 盛,喻洪流,陈兆曦
(1上海理工大学 康复工程与技术研究所,上海 200093;2上海康复器械工程技术研究中心,上海 200093;3江西善行智能设备制造有限公司,江西 赣州 341000)
0 引 言
二便护理机器人是针对行动不便、失能半失能老年人所研发的一种护理机器人,其能够自动检测患者的大小便,并进行冲洗、清洗、烘干等操作,帮助老年人实现大小便自理,缓解护理人员在处理老年人大小便过程中出现的尴尬和护理工作环境脏、累、差的情况,同时解决患者在护理过程中易感染、难清洗等问题,有效的替代护理人员的二便护理工作。
目前,国内外在这个领域上已经做了相关研究,并且出现了一些成果转化产品。日本的EVERCARE全自动大小便智能护理机器人和Smilet安寝全自动智能排泄处理机器人,是国外二便护理机器人中比较有代表性的。EVERCARE全自动大小便智能护理机器人,采用机器与床体结合的设计方式,加强了人体和大小便斗之间的贴合。管子埋入床体,方便了人体挪动,避免了人体与管子碰触造成感染的风险。但是由于床体和机器的结合设计,产品需要搭配特定床垫使用,相对提高了使用成本。Smilet安寝全自动智能排泄处理机器人,采用大小便斗与床体分离式设计方式,便斗用医用软胶制作,扁平化设计,穿戴在人体上,柔软不伤肤,有效减小了患者长时间使用出现褥疮的风险。但缺点在于人机交互性差,控制面板设计较简单,缺少实时信息反馈。
国内二便护理机器人比较典型的是苏州伊利诺护理机器人与铱鸣智能护理机器人。伊利诺二便护理机器人,采用微电脑控制技术、智能检测技术,自动感应患者大小便排泄情况,能够通过真空水气分离技术,进行多级处理,实现大小便冲洗,人体清洗和烘干。护理机外部还设计有亲肤贴片,能够有效防止局部感染和褥疮,提升了患者使用的舒适度。铱鸣智能护理机器人将便斗与床体合并设计,通过便斗下的气垫充放气过程,帮助患者排便和透气。正常的检测、冲洗清洗、烘干流程与其他二便护理机器人基本相同。两者的缺点都是工作头便斗设计与床体配合,不能单独使用。
综上所述,虽然国内外已经研发出了几款二便护理机器人,但是还存在搭配床体使用增加成本和大小便斗定制等问题。本文在充分研究现有护理机器人的基础上,对失能半失能老人二便护理需求进行调查分析,研发了一款能够不需要床体配合,独立使用的智能二便护理机器人。本文在针对人群的二便护理功能分析的基础上,对二便护理机器人进行总体设计;对机械系统、控制系统两部分进行详细地描述。
1 二便护理机器人方案设计
1.1 需求分析
本文设计的二便护理机器人所针对的是行动不便的老年人及长期卧床的病患等人群。通过调查这部分人的需求,分析得出二便护理机器人应具备的主要功能为:二便智能检测、冲洗、清洗、烘干、除臭消毒、交互控制等。
二便智能检测要求护理机器人能够自动准确地检测出患者大小便排出情况,通过冲洗、清洗、烘干人体来帮助患者实现大小便自理;除臭消毒确保患者有一个舒适、安全的使用环境;交互控制功能能够让患者和护理人员更加方便操作,通过简单地对机器人下发指令,控制元件则马上执行对应操作。
1.2 模块构成
本文通过上述功能分析,对控制系统功能模块进行分类。二便护理机器人功能模块主要包括:二便检测模块、冲洗清洗模块、烘干模块、控制模块等。检测模块负责检测患者排出的大小便及污物桶、净水桶的液位;冲洗清洗模块负责对工作头内部大小便进行冲洗,以及对患者排泄部位进行清洗;烘干模块负责对清洗后人体进行烘干,保持人体干燥,避免滋生细菌;控制模块包括总控制端及其外围电路,负责信号收集、传输以及下发指令,控制元件执行对应的功能。
2 二便护理机器人结构设计
二便护理机器人整体结构如图1所示,其主要结构由工作头和主机两部分组成。
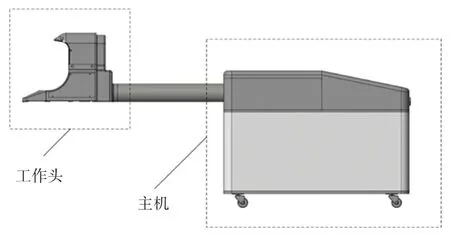
图1 二便护理机器人结构图Fig.1 The structure diagram of the nursing
2.1 工作头设计
二便护理机器人工作头结构如图2所示,工作头穿戴在人体上,用于检测识别大小便,并对人体清洗,烘干。工作头主要包括检测模块、冲洗清洗模块、烘干模块。检测模块利用透光性原理和电容特性,使用红外对射式传感器与接近式电容传感器来检测使用者的排泄状况;冲洗清洗模块和烘干模块,通过工作头内部冲洗管路、清洗管路进行工作;烘干风路输送水和热风来达到冲洗便斗、清洗和烘干人体的目的。研究中考虑到冲洗时所需水压有所不同,特别设计两种不同的喷头:矩形喷头与锥形喷头。矩形喷头负责冲洗小便,锥形喷头用来击碎大便,并配合矩形喷头进行冲洗。工作头外轮廓装有软胶垫,防止患者长期使用产生褥疮。

图2 二便护理机器人工作头Fig.2 The working head part of the nursing robot
2.2 主机设计
主机是存放执行元件的地方,其内部主要包括净水桶、污物桶、消毒器、电磁阀、水泵、真空泵、加热器、活性炭、主控制端等元件。电磁阀用来实现分路隔离控制,将冲洗水路、清洗水路、烘干风路分隔开并加以控制。水泵将加热器和消毒器处理后的净水泵出,进行冲洗、清洗,再通过真空泵抽负压将污物抽入污物桶中。主控制端接受工作头传感器信号,下发指令给各个执行元件,实现功能。主机部分如图3所示。

图3 二便护理机器人主机部分Fig.3 Nursing robot host part
3 二便护理机器人控制系统设计
本设计的控制系统以STM32F407板为核心,利用各传感器外围电路与STM32通信,将检测结果传给单片机,通过STM32的I/O端口控制继电器,进而控制各个执行元件实现功能。选用STM32F407芯片,植入ucosiii嵌入式系统,用以处理二便护理机器人不断检测和显示器上位机运行等多个线程任务。二便护理机器人控制系统结构如图4所示。

图4 二便护理机器人控制系统结构Fig.4 Control system structure diagram of nursing robot
3.1 传感器原理与应用
二便护理机器人的大便传感器采用红外对射式传感器,利用光栅遮挡数多少来检测大便这种不透光物体。红外对射式传感器安装于工作头两侧,将物体穿过所遮挡的光栅数转化为电压信号,经过放大器把微弱电压信号放大后,传给单片机I/O口;利用AD转换模块转成数字信号读取。单片机内部通过判断信号量的大小,从而判断患者是否排出大便。
小便传感器采用接近式电容传感器,当小便流过工作头便斗时,传感器与小便之间的介电常数发生变化,由此改变电路状态,使得小便传感器输出电压信号,通过输出的电压信号判断患者是否有小便排出。由于液位传感器原理与小便传感器原理相同,此处不再赘述。
陀螺仪(角度传感器)用来检测患者侧身角度值,并将角度值实时反馈给单片机。单片机通过角度传感器反馈的信息,判断患者侧身角度是否超过阈值(实验设计阈值为45°)。当角度超过阈值时,单片机会发出指令,使蜂鸣器报警,警告患者侧身角度太大,二便护理机器人无法正常工作。陀螺仪使用IIC接口与单片机进行通信,通过SCL传递时钟信息,SDA传递数据信息。角度传感器电路如图5所示。
温度传感器使用DHT22,用来测量净水桶内部加热水温以及烘干热风温度。温度传感器将检测到的温度数据传递给单片机,单片机根据患者或护理人员在主控制端设置的预设温度值来控制加热器工作,以此来控制水温和风温,提高患者使用舒适性。温度传感器电路如图6所示,其内部包括一个NTC测温元件,并与高性能8位单片机相连接,通过串口传递数据。
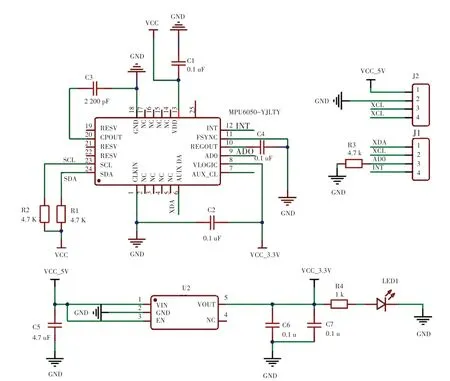
图5 角度传感器电路图Fig.5 Angle sensor circuit diagram

图6 温度传感器电路图Fig.6 Circuit diagram of temperature sensor
WiFi模块选用ESP32模块,通过串口与单片机连接,进而将单片机与云端连接,将实时数据上传到云端,也能够通过云端下发指令给单片机,控制二便护理机器人执行对应操作。云端通信结构如图7所示,患者(用户①)通过主控制端WiFi模块上传传感器数据信息给云端;护理人员(用户②)利用手机等能够连接网络的设备,通过云端能够查看一个或多个二便护理机器人的状态信息,并对这些机器人下发指令,执行对应操作。

图7 云端通信结构图Fig.7 Cloud communication structure diagram
3.2 控制系统流程设计
二便护理机器人控制系统检测步骤如下:
(1)机器人通电,按下启动按钮进入工作状态。
(2)对净水桶和污水桶液位进行检测,当两个桶的液位均正常时,开始检测患者大小便;否则发出警报提示音并点亮对应警报灯,提示护理人员倾倒污水或填装净水。
(3)当传感器检测到信号后,会根据传感器传回的信号判断是大便还是小便,并进入对应的冲洗流程。冲洗过程中,水泵与真空泵配合,共同完成冲洗工作。水泵从净水桶泵出净水冲洗便斗,真空泵抽负压,利用负压将冲洗污水排入污物桶。两种排便冲洗工作只是所用水管路与处理时间不同,执行过程并无本质区别。
在检测环节结束后,二便护理机器人会用热水和热风对患者身体进行清洗和烘干。二便护理机器人控制系统清洗烘干流程为:清洗阀打开、水泵工作,泵出净水清洗患者,真空泵利用负压将清洗污水排入污物桶,风机和加热片开始工作,对清洗后患者身体进行烘干。在清洗和烘干环节结束后,机器重新返回检测环节检测大小便。
4 检测实验
实验采用小块状橡皮泥模拟大便、浓度为0.3%氨水溶液模拟小便各自进行20次模拟实验检测。其中,正确检测出大便的次数为14次,正确率约为70%,而小便检测正确检测率为100%。
此外,二便护理机器人已经实现与云端互联,能够上传数据或从云端发送指令,控制二便护理机器人执行对应操作。
5 结束语
本研究所设计的二便护理机器人虽已初步实现检测、冲洗、清洗、烘干等功能,但在细节处理上仍存在一些问题。如,检测精度不高,难以准确检测大小便;风机动力不足,热风供应慢;结构设计复杂,不宜安装和拆卸等。为了更好地减轻护理人员负担,帮助老年人实现大小便自理,还需要进一步改进整体结构,进行模块化设计,方便安装和检查;对风机进行适当的优化,以保证提供足够风力烘干;深入研究传感器检测知识,选择更合适的传感器和检测方法。
