基于FFRLS−EKF联合算法的锂离子电池荷电状态估计方法*
2022-05-05孙金磊顾浩天朱金大
孙金磊,邹 鑫,顾浩天,崔 凯,朱金大
(国网电力科学研究院有限公司,南京 211106)
前言
锂离子电池以其能量密度高、使用寿命长和自放电率低等优点被广泛应用于电动汽车中。电池荷电状态(state of charge,SOC)估计是电动汽车电池管理的关键技术之一,对电池的保护、使用寿命预测和热管理等都具有重要的作用。因此,准确估计电池SOC无论在理论研究还是实际应用中都具有重要意义。
现有常见SOC估计方法包括:安时积分法、开路电压法、扩展卡尔曼滤波法(extended Kalman filter,EKF)、神经网络法和离散滑模观测器法等。安时积分法简单易用,是工程上应用最为广泛的一种方法。但该方法对初始SOC、电流测量精度和采样时间具有较高要求,且累计误差难以消除,因此长期运行时估计精度会受到影响。开路电压法须将电池长时间静置以获得准确的开路电压(open circuit voltage,OCV),故难以满足电动汽车实时SOC估计的要求。对于常用的三元材料电池,其OCV−SOC曲线线性度较高,开路电压结合安时积分的方法在短时间内具有较高的估计精度,但仍存在初始SOC须长时间静置获取和累计误差的问题,无法满足运行状态下实时SOC估计的要求。为消除修正累计误差的影响,有学者提出基于EKF的SOC估计方法,但该方法的估计精度受限于电池模型参数的准确性,电池模型参数不准确时会影响SOC估计精度。基于神经网络法的SOC估计须对数据进行大量训练,其估计精度和运算步长取决于训练数据。离散滑模观测器法能处理电池非线性模型对状态估计结果的影响,但是其抖振现象可能会造成SOC估计结果不收敛。
在上述基于EKF的SOC估计方法中,其SOC估计精度依赖于模型参数的准确性。为提高电池模型参数的精度,通常采用在线参数辨识的方法获取电池模型参数。递推最小二乘算法(recursive least squares,RLS)及其衍生算法是最常用的电池模型参数在线辨识方法。文献[8]中利用带遗忘因子的RLS进行偏差补偿,提高了有色噪声数据的参数辨识精度。文献[9]中使用可变遗忘因子的最小二乘(forgetting factor recursive least square,FFRLS)辨识梯次利用电池模型参数,通过不断对遗忘因子进行校正能更好地跟踪电池老化特性。文献[10]中将滤波高阶滑模微分器与RLS算法相结合辨识电池模型参数,该方法能实现电池模型参数的在线辨识,同时对噪声具有一定的耐受性。除RLS及其衍生算法外,遗传算法、卡尔曼滤波算法和最大似然函数法也常被用于电池模型参数的在线辨识。
本文中针对基于EKF的SOC估计方法忽略工况和SOC变化对电池模型参数的影响从而增大SOC估计误差的问题,提出一种基于FFRLS−EKF的SOC估计方法。利用FFRLS算法在线辨识电池等效电路模型参数,实时修正电池等效电路模型,并将修正后的等效电路模型用于EKF中,提高EKF的SOC先验估计精度,从而提高SOC的估计精度。为验证估计效果,设计3组不同交变电流激励测试实验来验证所提出的方法,并与基于EKF和自适应扩展卡尔曼滤波(adaptive extended Kalman filter,AEKF)的估计方法进行了对比分析。
1 锂离子电池等效电路模型与参数辨识
1.1 锂离子电池等效电路模型
锂电池模型包括电化学模型、等效电路模型、半电池模型和热电耦合模型等。其中,等效电路模型结构简单,参数物理意义清晰,能够用数学解析式表达,便于参数辨识和状态估计,在目前的研究中得到广泛应用。考虑到电池模型精度、计算复杂度、实用性和可操作性等因素,采用如图1所示的1阶RC等效电路模型。

图1 1阶RC等效电路模型
图1中和分别表示极化电阻和极化电容,为极化电压,为欧姆电阻,为电池的开路电压,和分别表示电池端电压和端电流。由基尔霍夫定律可得电路时域方程,如式(1)所示,连续状态方程和输出方程分别如式(2)和式(3)所示。

式中:()为时刻电池的荷电状态;为电池的库伦效率;为电池的额定容量。
OCV是电池模型中的重要参数,通常被视为SOC的非线性函数,可通过离线获得的OCV−SOC映射关系求解得到。常用的OCV−SOC曲线获取方法有:长时间静置法、小电流充放电法和恒流充放电间歇法。长时间静置法和小电流充放电法简单可靠,但通常须花费数十小时。本文中采用恒流充放电间歇法,以0.5C倍率对锂电池恒流充放电,每充入或放出1%的电量静置1 min,直至电池充满或放空。静置1 min后的电压作为OCV,将充电曲线和放电曲线取平均即可得到OCV−SOC曲线,如图2所示。

图2 恒流充放电间隙法测得OCV−SOC曲线
此时获得的OCV−SOC曲线为离散形式,为得到不同SOC相对应的OCV值,可以采用多项式拟合或查表的方法。OCV的准确度直接影响到参数辨识和SOC估计精度,本文中使用查表的方法获得不同SOC对应的OCV值。
1.2 锂离子电池模型参数辨识
使用FFRLS算法在线辨识电池模型中的欧姆电阻、极化电阻和极化电容。根据式(1)的电路时域方程,结合拉普拉斯变换可以获得电路频域方程。令()=()−(),求得连续传递函数。采用脉冲响应不变法离散化传递函数,求得离散传递函数和相应的差分方程。对差分方程整理,得到递推最小二乘电路方程(recursive least squares circuit equation,RLSCE)。最后通过待辨识参数、和求解电池等效电路模型中的欧姆电阻、极化电阻和极化电容。RLSCE转换过程和电路参数解析式如表1所示。
表1中()=(),=为极化时间常数,为采样时间,为输入向量,为待辨识参数向量,、和为待辨识参数。

表1 RLSCE转换过程和电路参数解析式
RLS算法能够在线辨识电池参数,实时修正电路模型。引入遗忘因子(forgetting factor,FF)能降低旧数据的影响度,增加新数据的影响度。本文采用FFRLS辨识电池等效电路模型参数,算法递推过程如下。
(1) 参数初始化
(2) 计算估计误差

(3) 计算增益矩阵

(4) 参数估计

(5) 更新协方差矩阵


2 基于卡尔曼滤波的SOC估计
2.1 基于EKF的SOC估计
EKF算法针对非线性系统状态方程,根据系统输入输出观测数据对系统状态进行最小均方误差最优估计。该算法利用SOC估计方程对状态变量进行“预测”,再利用观测数据对“预测”结果进行“校准”,通过不断地“预测−校准”循环迭代得到准确的状态变量估计值。为使用EKF算法估计SOC,首先要将式(2)的连续状态方程转化为离散状态方程,转换结果为

式中对的导数用1阶向后差分表示。由式(3)和式(10)可得式(11)离散输出方程:
式中和为系数矩阵。式(9)的离散状态方程和式(11)的离散输出方程共同组成SOC估计方程,结合EKF算法即可估计电池SOC。
EKF算法基本步骤如下:

(2)状态变量先验估计

(3)误差协方差矩阵先验估计

(4)系统观测量预测和计算观测误差

(5)计算卡尔曼增益

(6)状态变量后验估计

(7)误差协方差矩阵后验估计


EKF算法中的过程误差和测量误差的协方差矩阵初值设置不当时可能导致SOC估计结果发散,为解决上述问题可采用自适应扩展卡尔曼滤波(adaptive extended Kalman filter,AEKF)算法估计电池荷电状态。AEKF算法是在EKF算法的基础上加入自适应误差协方差匹配,如式(19)所示。通过观测误差实时修正过程误差和测量误差的协方差矩阵,避免初值设置不当造成的SOC估计结果发散问题。
2.2 基于FFRLS-EKF的SOC估计
锂离子电池等效电路模型参数随电池SOC变化而呈现数值上的差异,尤其是极化电容和极化电阻在不同运行工况下也会发生改变。如何实时调整电池等效电路模型参数来保证模型精度,进而提高SOC估计精度是需要解决的实际问题。
基于FFRLS−EKF的SOC估计方法流程如图3所示。首先,通过固定时间间隔采样得到电池的电压和电流信息(电压、电流信息一方面用于辨识电池等效电路模型参数,另一方面用于估计SOC)。其次,利用FFRLS算法在线辨识电池等效电路模型中的欧姆电阻、极化电阻和极化电容,并将其用于更新EKF算法中的状态方程系数矩阵和测量方程系数矩阵,实时修正EKF算法中的电池模型。再次,通过EKF算法和修正后的电池模型估计SOC。最后,根据估计出的SOC结合查表方法获得OCV,用于下一 时刻FFRLS算法辨识电池等效电路模型参数。
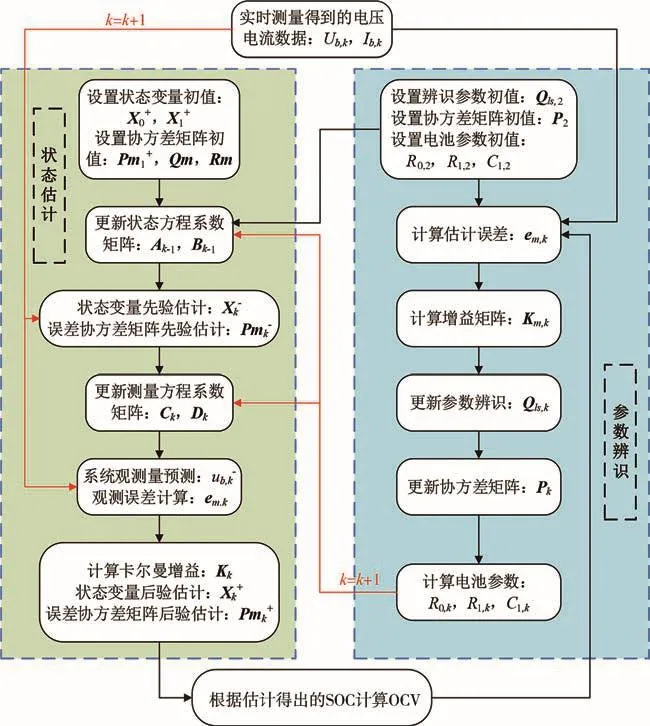
图3 本文所提方法的算法流程
3 测试实验与结果分析
3.1 测试实验
测试实验在新威电池测试仪CT−4008上进行。该设备的电压量程和精度分别为0.025~5 V和±0.05%,电流量程和精度分别为0~20 A和±0.05%。本文所选用的电池是芯驰光电科技有限公司生产的ISR18650−2.2Ah三元锂电池,电池基本参数如表2所示。

表2 三元锂电池基本参数
为验证所提出SOC估计方法的可行性,分别在脉冲放电、脉冲充电和动态应力测试3种工况下进行验证。所有测试实验均在25℃下进行。
(1)脉冲放电实验
以0.5C倍率将电池充电至上限截止电压,静置2 h后以0.5C倍率对电池放电,放电1 min并静置1 min,如此循环直至电池电压达到下限截止电压。
(2)脉冲充电实验
以0.5C倍率将电池放电至下限截止电压,静置2 h后以0.5C倍率对电池充电,充电1 min并静置1 min,如此循环直至电池电压达到上限截止电压。
(3)动态应力测试(dynamic stress test,DST)实验
以0.5C倍率将电池充电至上限截止电压,静置2 h后按照DST工况步骤对电池使用交变电流充放电,重复DST工况步骤直至电池电压达到下限截止电压。
3.2 实验结果
为对多种SOC估计方法的估计结果进行比较,可按式(20)比较实验值和估计值的误差。
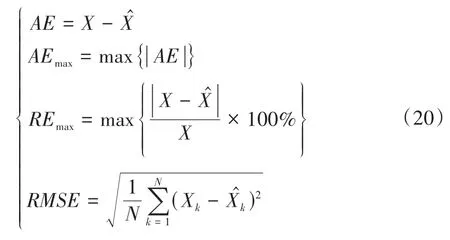
式中:为绝对误差;为实验值;̂为估计值;为最大绝对误差;为最大相对误差;为均方根误差;为总的采样点数。
基于FFRLS−EKF的SOC估计方法中FFRLS估计端电压和实际测量端电压比较如图4所示。
从图4可以看出,在脉冲放电实验和DST实验放电末期,端电压的绝对误差明显增大;而在脉冲充电实验的起始阶段绝对误差也明显大于其他时间段。这是因为SOC设置的初值与实际值略有不同,使查表得到的OCV不准确,且OCV−SOC曲线在电池的充电起始阶段和放电终止阶段会出现剧烈变化,使等效电路模型中OCV对于SOC的估计结果更加敏感,即放大了SOC估计误差对OCV的影响,最终使端电压绝对误差变大。3组测试实验的端电压、和如表3所示。
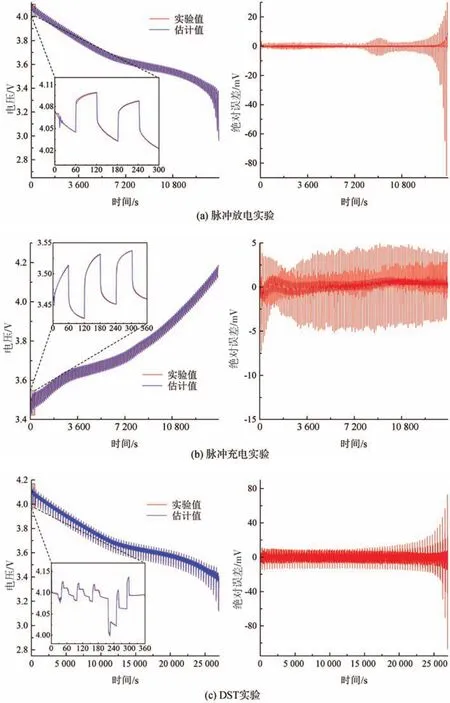
图4 FFRLS估计端电压和实际测量端电压比较

表3 3组测试实验的端电压AE max、RE max和RMSE
通过所提SOC估计方法中FFRLS辨识出的参数而求得电池等效电路模型参数如图5所示。可以看出,3种测试实验中得到的欧姆电阻、极化电阻和极化电容均不相同,且随SOC的变化而改变。EKF和AEKF算法中采用离线辨识的电池模型参数会降低SOC估计精度。所提SOC估计方法中等效电路模型参数通过在线参数辨识获得,通过实时修正等效电路模型参数,进而提高SOC估计精度。
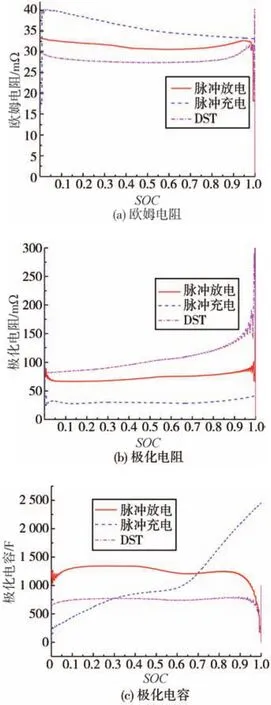
图5 3种工况下等效电路模型参数辨识结果
为证明本文所提出SOC估计方法的优越性,分别与基于EKF和AEKF的估计方法在3组测试工况下对SOC估计结果进行比较,如图6所示。其中,SOC实验值是对新威电池测试仪CT−4008输出的电流用“安时积分法”计算得到的。可以看出,与离线获取等效电路模型参数的基于EKF和AEKF的SOC估计方法相比,所提方法得到的SOC绝对误差整体小于基于EKF和AEKF方法得到的SOC绝对误差。这是因为实时修正电池模型参数,提高了EKF算法的先验估计精度,从而提高了SOC的估计精度。
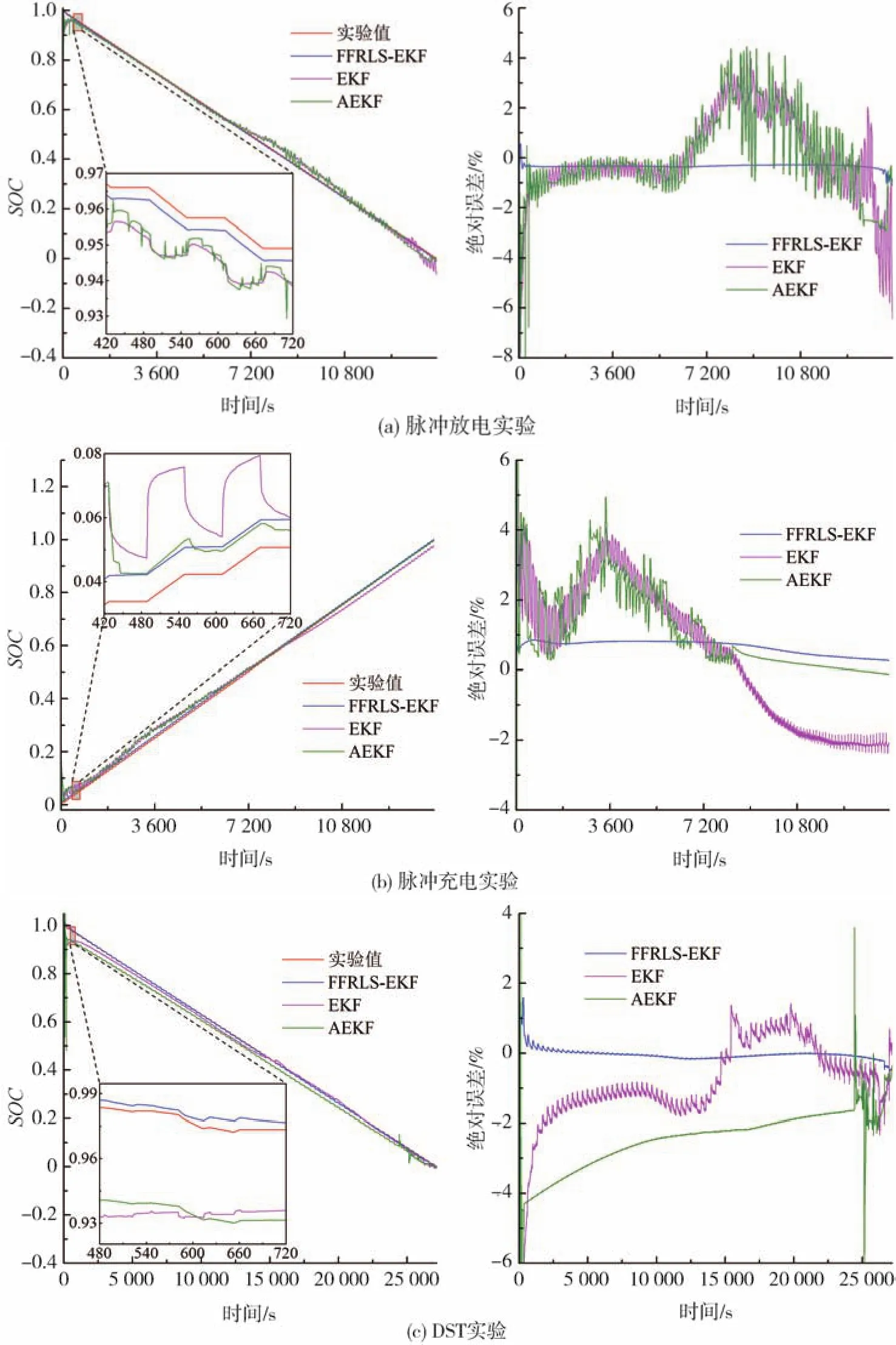
图6 SOC估计结果和绝对误差比较
3组测试实验SOC估计如表4所示。可以看出,3组实验中FFRLS−EKF的都小于EKF和AEKF算法,最大为0.69%。表5给出本文所提SOC估计方法在3组测试实验下SOC设定的初值与实际初值的误差(初始误差),全时间尺度(测试实验开始至结束的整个时间段称为全时间尺度)SOC的和算法运行30 s后的(即算法收敛后的最大估计误差)。
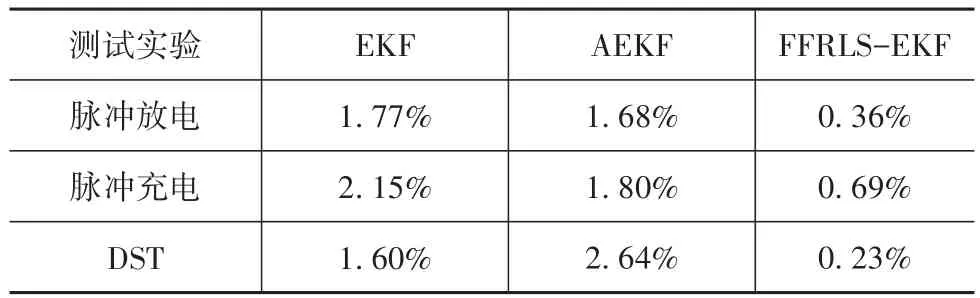
表4 3组测试实验SOC估计RMSE
从表5可以看出,全时间尺度与初始误差有关。这是因为全时间尺度通常出现在算法迭代初期,设定的SOC初值与实际值较为接近时全时间尺度较小,反之亦然。此外,从表5还可以看出,算法收敛后所提出的方法具有较好的SOC估计精度。在脉冲放电、脉冲充电和DST实验中SOC最大估计误差分别为1.01%、0.87%和1.59%。
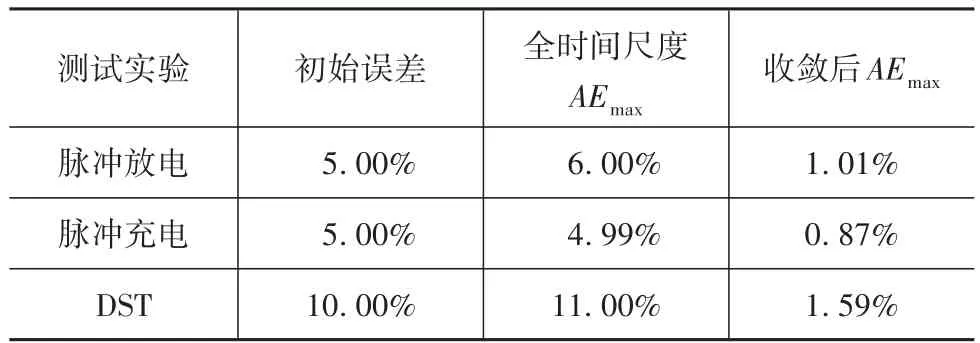
表5 3组测试实验SOC估计误差
4 结论
SOC估计是电动汽车电池管理的关键技术之一。传统的采用恒定模型参数的EKF算法估计电池SOC忽略了模型参数随SOC和工况的变化,这增大了SOC估计误差。为解决上述问题,本文的研究如下:
(1)针对电池开路电压获取速度慢的问题,采用恒流充放电间歇法离线获取开路电压。
(2)提出一种基于FFRLS和EKF相结合的SOC估计方法,提高SOC估计精度。
(3)在脉冲充电、脉冲放电和DST 3种工况下分别对采用EKF、AEKF和本文所提出方法进行对比。结果表明:所提出的基于FFRLS−EKF的SOC估计方法能根据SOC和工况的变化有效修正电池等效电路模型参数,在3种工况下都具有更小的SOC估计误差,算法收敛后SOC最大估计误差为1.59%。
电池等效电路模型参数也会受到低温和老化的影响。后续工作将围绕低温和老化条件下的在线可用容量估计和SOC估计展开,以拓展所提出方法的适用性。
