耙吸式挖泥船波浪补偿器控制分析
2022-05-05饶洪华
饶洪华
(大连中远海运重工有限公司,辽宁大连 116113)
0 引言
波浪补偿器在耙吸式挖泥船的挖泥作业中起到至关重要的作用。区别于主动补偿系统中利用伺服阀使马达转动,进而收放钢丝绳,在开式液压系统中,波浪补偿器的补偿方式是被动的,它没有外部动力源,系统对耙头与船舶的相对运动产生的钢丝绳张力及系统压力的变化做出反应,在蓄能空气罐与液压油缸之间进行自平衡。连接蓄能空气罐与液压油缸的液压控制阀在自平衡过程中起到关键的控制作用,如何使波浪补偿器在被动运动的过程中进行安全和有效的工作具备重要的研究意义。
1 波浪补偿器的基本原理
如图1所示,波浪补偿器主要由液压油缸、滑轮、空气罐和液压控制阀组组成。牵引耙头的钢丝绳压在垂向安装的液压油缸顶部的滑轮上,受到液压油缸的推力作用,钢丝绳中产生相应张力。

图1 波浪补偿器示意
波浪补偿器用于维持耙头对海床的压力,控制钢丝绳张力在预设的范围内变化,防止钢缆自由松弛和再度张紧。当船舶受波浪影响向上运动,或耙头沿海床向下运动时,要保持耙头在海床的位置不变,水面以下的钢丝绳变长,船上的钢丝绳变短,钢丝绳张力变大,油缸在钢丝绳张力的作用下被缩回;反之,当船舶受波浪影响向下运动,或耙头沿着海床被迫向上运动时,水面以下的钢丝绳变短,而船上的钢丝绳变长,钢丝绳张力变小,为维持钢丝绳的张力,油缸在油压的作用下伸出,钢丝绳张力抵消了耙头对海床压力加大的倾向。
被动型波浪补偿器应用的是“油液-气体弹簧”效应。空气罐作为蓄能器,内部填充有压缩空气和液压油,通过液压控制阀组和液压管路将空气罐内的压力油与液压油缸相连通。液压油缸为单作用油缸,只能在油压力的作用下主动将油缸伸出,而油缸的缩回则需借助于钢丝绳压向滑轮的张力。
空气罐内预先充满3 MPa的压缩空气,在工作时,液压系统向其内部继续填充不同体积的油液,用以调节空气罐内油液的初始压力。波浪补偿器工作时,油缸内压力时刻发生变化,需通过空气罐内的油液压力进行平衡。
初始压力根据电控系统中的设置进行调节,空气罐充满或排出全部油液均能在15 min内完成。空气罐安装有本地液位指示和高低液位开关,波浪补偿器油缸安装有专用位置传感器,油缸运动的位置信息可在挖泥电控系统中显示,方便实时监控和及时调整。
2 波浪补偿器的控制要素
根据波浪补偿器的使用功能要求,在如下3种情况下,波浪补偿器必须能够实现锁定。
1)在耙管绞车起降泥耙时,为避免波浪补偿器不必要的补偿运动,可通过按下“锁定”按钮实现一键锁定功能。
2)在挖泥过程中,当监测到耙头前方有障碍时,应立即触发“探测系统应急起耙”功能,即快速锁定波浪补偿器,再用耙头绞车将耙头起升,离开海床。
3)在钢丝绳意外破断时,控制系统必须能够紧急锁定液压油缸的运动。与此同时,油缸的压力必须控制在极限工作压力以下,防止油缸被瞬态液压冲击损坏。
波浪补偿器在工作工况下,可通过电控系统调节空气罐内的初始充油量来调节钢丝绳张力的大小,钢丝绳张力的调节范围为耙头绞车额定拉力的20%~70%。不同初始充油量情况下空气罐的初始压力和油缸压力见表1。
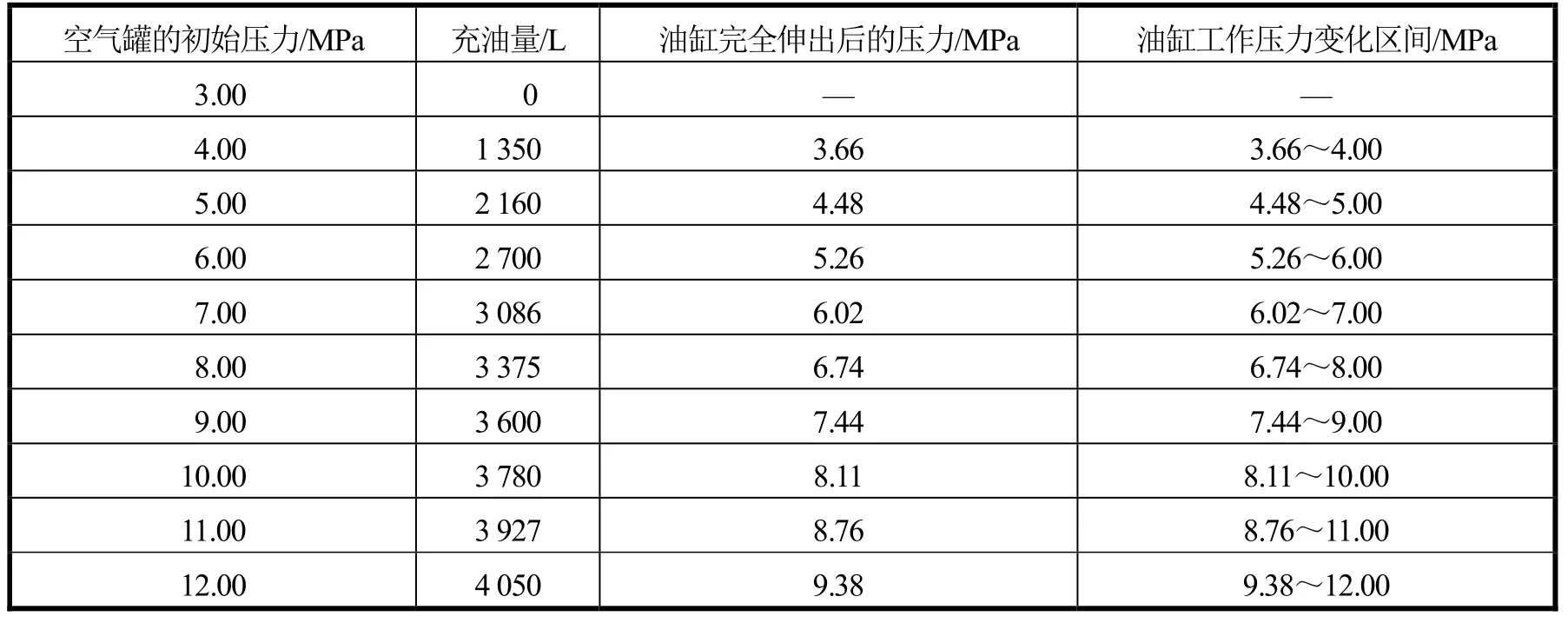
表1 不同初始充油量情况下空气罐的初始压力和油缸压力
3 波浪补偿器的液压控制
波浪补偿器的油缸和空气罐通过液压控制阀组进行控制。以18 000 m耙吸式挖泥船为例,液压油缸的总行程为3 m,最大补偿距离为6 m,油缸的最大移动速度为1 m/s。按照油缸容积为377 L进行推算,可得油缸的最大设计流量为7 540 L/min。如此大的流量应优先考虑使用盖板式插装阀进行压力和方向控制。因此,采用2个大流量盖板式插装阀(插装阀1和插装阀2)连接油缸和空气罐(见图2)。
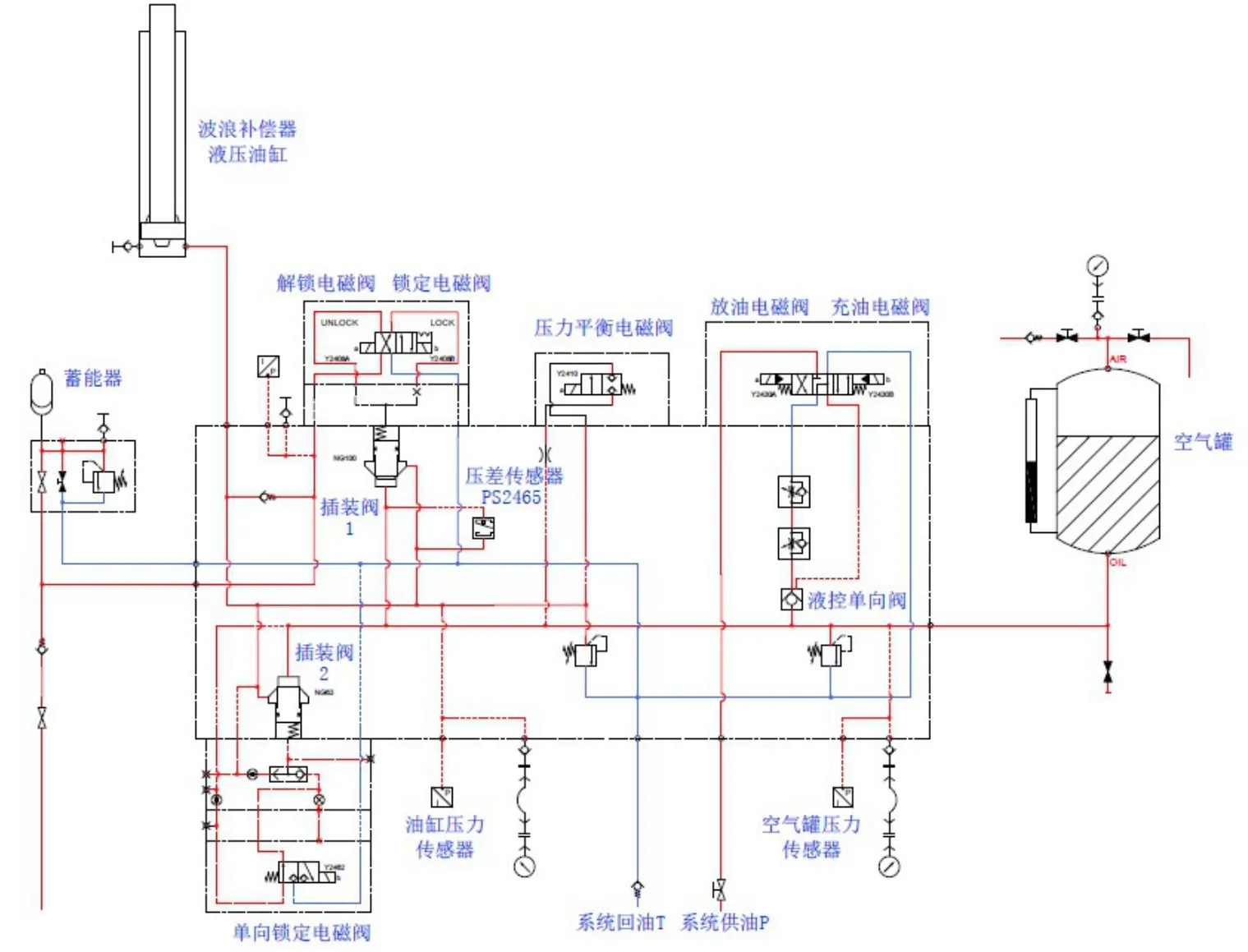
图2 波浪补偿器液压原理示意
插装阀1默认为打开状态,其开关状态由盖板上的电磁阀控制。系统中安装的5 L蓄能器采用独立的高压系统来保持压力,其压力远高于油缸或空气罐的工作压力。在挖泥作业时,电磁阀不需要一直给电,电磁阀的默认位置为解锁位置,且不带复位弹簧。若需要切换电磁阀的位置,则必须由电控系统发出1次脉冲电信号。
插装阀1默认为关闭状态。当盖板上的单向锁定电磁阀得电时,插装阀2起到单向阀的功能。当空气罐的压力大于油缸压力时,压力油流入油缸,使油缸伸出;而当油缸的压力大于空气罐的压力时,油缸不能缩回。单向阀功能主要用于探测系统应急起耙的工况。
为实现不同功能要求,波浪补偿器可分为如下6种操作模式:1)波浪补偿;2)按钮锁定;3)紧急锁定;4)探测系统应急起耙;5)解锁;6)空气罐压力调节。
1)波浪补偿
挖泥作业工况下,解锁电磁阀得到1次脉冲信号,插装阀1打开,液压油缸与空气罐连通。正常工作时,油缸与空气罐的压力差值应在 0.45 MPa范围内。若空气罐的压力高于油缸压力0.8 MPa以上,应立即触发“紧急锁定”操作。
2)按钮锁定
驾控台和挖泥控制台均设置有“波浪补偿器锁定”专用按钮。在按下该按钮后,锁定电磁阀和单向锁定电磁阀同时得电,波浪补偿器的油缸被锁定。
3)紧急锁定
当压差传感器监测到空气罐的压力高于油缸压力0.8 MPa以上时,空气罐向油缸供油流量过大,超过最大设计流量的30%。此时,控制系统立即发出“紧急锁定”控制命令,锁定电磁阀得到1次脉冲信号,插装阀1被快速关闭。
4)探测系统应急起耙
当需要应急起耙时,锁定电磁阀和单向锁定电磁阀同时持续得电,波浪补偿器油缸只能伸出,不能缩回,耙头被绞车从海床紧急起升。
5)解锁
解锁操作前,需保证空气罐的压力与油缸压力差值小于0.45 MPa,若压差过大,则不能解锁。解锁操作首先将压力平衡电磁阀通电,通过小流量的节流阀将空气罐与油缸连通,待压差满足条件后,再将压力平衡电磁阀断电并给解锁电磁阀1次脉冲信号,空气罐与油缸连通,从而实现解锁功能。
6)空气罐压力调节
电控系统的操作界面可改变空气罐的压力设定值。当空气罐压力传感器反馈的实际值小于设定值时,液压系统向空气罐内充油;当实际值大于设定值时,空气罐向液压系统放油。充油时,充油电磁阀得电,油从液压系统经流量控制阀和液控单向阀流向压力罐;放油时,放油电磁阀得电,油从空气罐经液控单向阀和流量控制阀流入液压系统。
4 结论
波浪补偿器在耙吸式挖泥船的挖泥作业中起到至关重要的作用,本文基于18 000 m耙吸式挖泥船项目,分析开式液压系统波浪补偿器控制的关键要素,得到如下结论:
1)波浪补偿器工作时需设置锁定与解锁功能,该功能通过安装在插装阀盖板上的不同电磁换向阀的通电或断电来实现。
2)通过监测插装阀两侧的压差来判断流量是否超标。当压差过大时,应立即触发紧急锁定。
