基于机器视觉的篮球投篮打手动作识别方法
2022-05-02童金茂
童金茂
(福建船政交通职业学院 通识教育学院体育部,福建 福州 350007)
0 引言
动作识别的技术受到高度关注,使其得到快速发展[1-2].动作识别技术主要目的是精确、快速地将视频图像序列中的运动目标在背景中区分出来,它对目标识别以及定位等动作起着重要作用.现阶段如何在复杂环境下进行篮球投篮打手动作识别成为现阶段研究的热点话题,然而,有关篮球投篮打手动作识别方面的内容少之又少.在计算机处理技术的不断加强下,才使该技术得到广泛应用,同时,出现很多新的动作识别技术.凌佩佩等[3]将全部三维信息设定为特权信息引入到二维动作识别过程中,进而实现动作识别,但是降噪效果不佳.罗会兰等[4]对输入信号的类型和数量进行统计,通过深度学习进行人体动作识别,但是识别的准确率不高.上述两种方法虽然取得了较为满意的研究成果,但是无法满足现阶段的发展需求.因此,提出一种基于机器视觉的篮球投篮打手动作识别方法.测试结果表明,本文方法能够在复杂的环境下有效地实时识别动作.
1 方法
1.1 图像预处理
篮球投篮打手动作识别是目前研究的热点话题,该技术主要是图像的识别,然而,图像预处理在图像色彩量化过程中占据十分重要的地位.设定采集到的篮球投篮打手动作图像均为真彩色图像[5-6].因此,为实现图像预处理,需要优先对彩色图像进行量化处理,具体操作步骤如下.
(1)选取具有代表性的256种颜色,结合系统已有颜色,选取剩余颜色即可.同时将全部色彩作为调色索引,组建调色板.
(2)初始图像内全部的颜色映射到调色板索引,组建全新的图像数据.
通过图像中的RGB颜色值全部均匀划分到八叉树结构中实现图像的量化处理.量化处理的操作是在含有9层深度结构的八叉树中,包含一层根节点以及不同取值的8层节点,将不重要的RGB取值放置在较低层,在编程的过程中删除最下面的三层[7],有效节省内存,并且提升计算效率.
图像的量化过程如下:在扫描图像内全部的色素时,将扫描到的新颜色放置在八叉树中,构建全新的节点.当叶节点数量高于所需要重构的调色板颜色数量时,将最下面的节点放置到上层节点进行转换,最终形成叶节点.将在节点数据中出现的颜色以及频数进行存储,能够有效的降低图像的颜色数[8],直至叶节点数量达到调色板所需要的的颜色数量,将叶节点颜色设定调色板颜色,深度扫描处理全部源文件,同时将各个色度点放置到调色板索引上,进而形成一个全新的目标图像文件,图1为具体的操作流程.
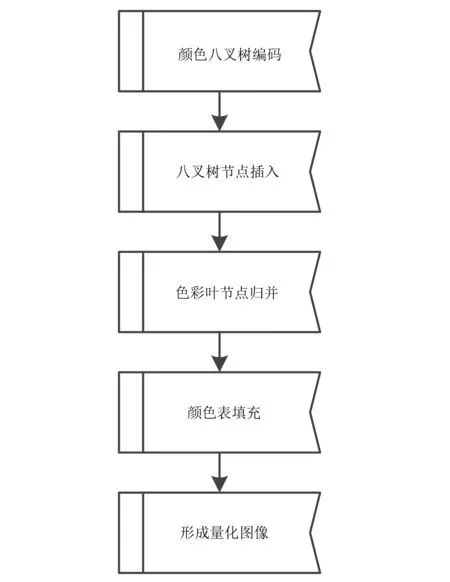
图1 八叉树量化流程图
在CCD摄像头进行图像采集的过程中,会出现图像的质量下降等问题.因此,采用滤波处理的方式对图像进行处理,提高图像的质量,其主要是由噪声的特性所决定的,在不同的空间域或者频率均采取不同的处理措施[9].
设计滤波器窗口尺寸以及对滤波效果进行分析,利用编程设定窗口的大小以及窗口数量,给出整个算法的具体操作流程如下:
设窗口内N个矢量的集合能够表示为
V={v1,v2,…,vN}.
(1)
根据矢量中值滤波器计算对应的输出中值数量,即
xVM=VM{v1,v2,…,vN}.
(2)
窗口中不同矢量间的距离和为
(3)
其中vk需满足
(4)
式中:vk代表输出的中值矢量.
此外,如果光的强度不均匀会对图像的色彩产生影响,同时影响图像后期的分割效果.造成该现象的主要原因是大部分的光源为点光源,且采集的图像均呈中间亮旁边暗的状态,因此,需要对图像进行亮度补偿,以此完成图像预处理.
1.2 基于机器视觉的篮球投篮打手动作识别
当图像经过预处理后,通过机器视觉对篮球投篮打手动作进行识别,具体的操作流程如图2所示.

图2 基于机器视觉的篮球投篮打手动作识别流程图
通过背景差分法对篮球投篮打手动作进行剪影特征提取,得到对应的剪影特征.在t时间段内[10-11],对图像I中的像素低进行剪影,其中剪影特征可以表示为D(x,y,t).通过全局时空表征向量表示特征的时空变化,具体的计算式为

(5)
由于需要针对不同时间间隔内的篮球投篮打手动作进行识别,使用机器视觉进行表征的过程中还需要考虑时长产生的影响.设定最小时长为τmin,最大时长为τmax,为了有效实现不同图像序列的匹配工作,在表征时设定时间窗口算子为Δτ,n代表窗口数量,通过以下公式计算各个Δτ对应的MHI,

(6)
利用阈值法获取动作时空特征[12],同时使用时空特征在时间坐标的累积完成动作特征表征.
利用图像势获取图像中全部像素的关联性,给定一幅图像I,首先计算梯度幅值G在设定区间内的平均值,则有
GI=|G|*Gσ.
(7)
在对数空间内对图像进行滤波处理,获取各个像素点间的相关关系,即
RI=ln(GI)-ln(GI)*Gσ.
(8)
针对原始的图像势能进行改进[13],经过改进后指数函数区间对应的图像势能,即梯度函数表示为
∇Gr(x,y)=γ[φ(eη(x,y,σ))].
(9)
将梯度函数∇Gr(x,y)设定为sobel梯度,则有
Grx=I(x-1,y+1)+2I(x,y+1)+
I(x+1,y+1)-I(x-1,y-1)-
2I(x,y-1)-I(x+1,y-1),
(10)
Gry=I(x-1,y-1)+2I(x-1,y)+
I(x-1,y+1)-I(x+1,y-1)-
2I(x+1,y)-I(x+1,y-1).
(11)
针对图像而言,在进行sobel梯度计算的过程中,将其看做通过窗口对图像进行卷积操作,其中对应方向的核窗口表示为
(12)
(13)
由于模糊特征值存在负值和零值,因此,在映射时需要选择模糊特征点对应的绝对值,同时将其进行转换,具体的计算公式为
(14)
在完成转换后,对图像进行阈值化处理,获取图像势能差分在不同方向的特征,即
(15)
(16)
在上述分析的基础上,进行深度特征提取,获取中层特征描述子[14-15],即
(17)
将获取的中层特征作为局部动作表征算子,采用soft-VLAD算法对其进行高时空特征表述,最终达到篮球投篮打手动作识别的目的,即
(18)
2 仿真实验
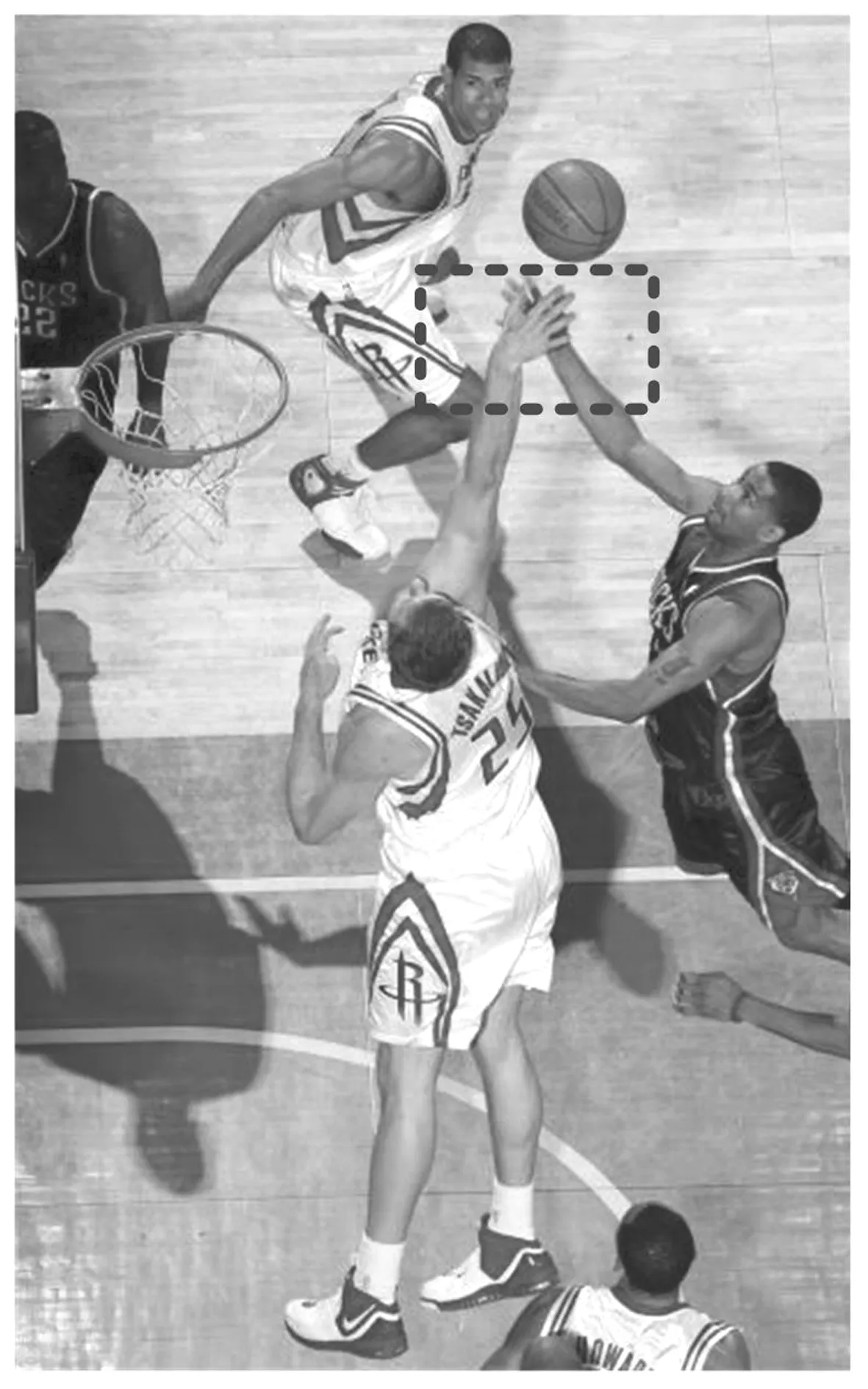
为了验证本文设计的基于机器视觉的篮球投篮打手动作识别方法的准确性,设计以i7处理器为实验平台,实验数据来自ADNI数据库的实验.在实验的过程中,设置两组对照组进行对比分析,对比组采用的方法分别为文献[3]的结合特权信息的人体动作识别和文献[4]的深度学习的视频中人体动作识别方法,在相同的条件下用不同的方法对相同的动作进行识别,识别结果如图3所示.
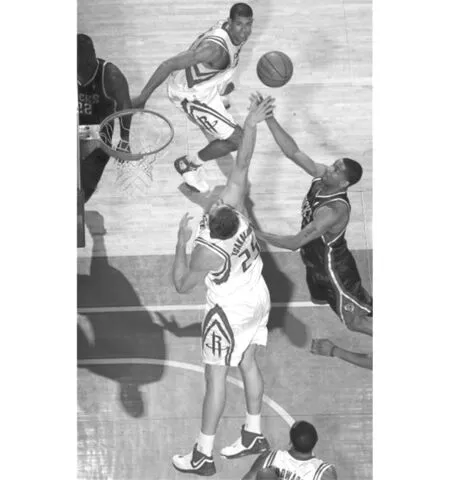
(a)测试对象
(b)本文方法
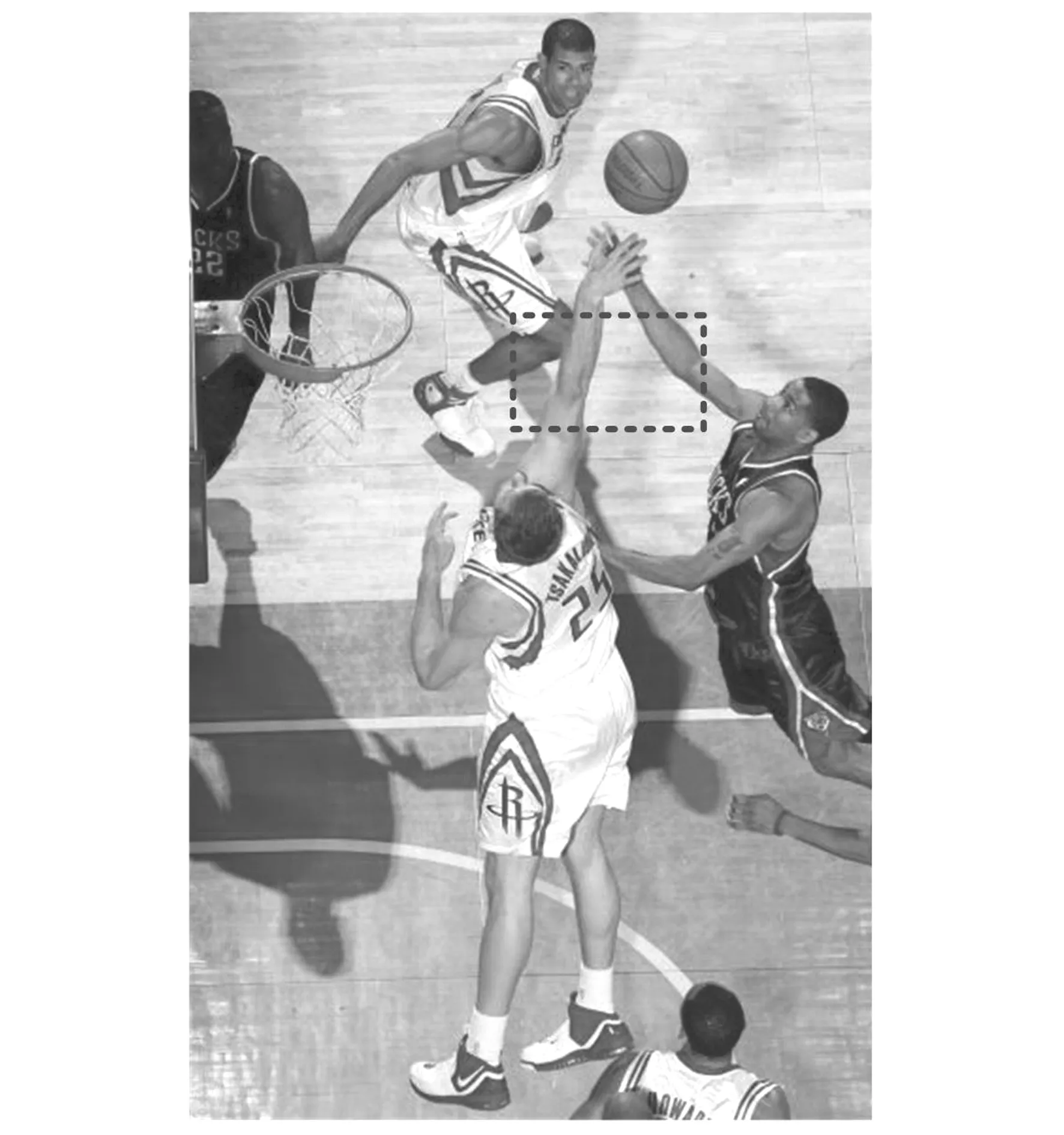
(c)文献[3]方法

(d)文献[4]方法
分析图3中的实验数据可知,本文方法在多人环境下能够精准识别篮球运动员的篮球投篮打手动作,及时发现犯规情况,而另外两种方法的识别均存在误差,分别识别到肘部和小范围的手掌,其精度远远低于本文的方法,这说明所提方法能够获取更加精准的识别结果.
动作识别的时间长短也是衡量动作识别技术的好坏指标,因此,为了更加全面地验证本文方法的优越性,将识别时间设定为测试指标,对比结果如表1所列.
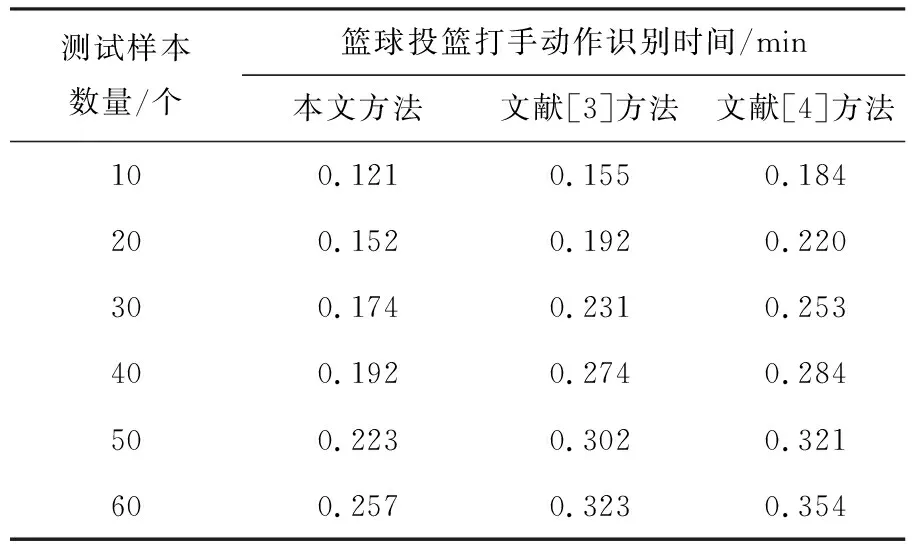
表1 不同方法的篮球投篮打手动作识别时间对比结果
由表1中的数据可知,本文方法无论进行多少样本的测试,其所用识别时间都是3种方法中最短的,而且本文方法平均识别时间为0.187 min,文献[3]的方法平均识别时间为0.246 min,文献[4]的方法平均识别时间为0.269 min,其他两种方法的识别时间均高出本文方法.因此,本文方法能够更快地完成精准的识别.
3 结语
通过机器视觉进行动作识别为实现机器人和人智能交互起到重要作用,结合机器视觉,提出一种基于机器视觉的篮球投篮打手动作识别方法.通过八叉树量化方法对图像进行量化处理,借助矢量中值降低噪声的干扰,再对其进行深度特征提取,得到中层特征描述子,通过soft-VLAD算法对局部算子进行高时空特征表述,实现篮球投篮打手动作的识别.经过实验证明,本文的方法与传统方法相比,降低了识别时间,提高了的精准度,并且能够在复杂环境下进行识别,同时实时输出结果,在动作识别技术上取得了突破性进展,满足了篮球运动的需求,丰富了动作识别技术,提高了识别效果,可为篮球运动和识别技术的发展提供参考.
