基于图像测速的波浪破碎两相速度场测量方案探讨
2022-04-29许媛媛梁书秀毕小奇薛庆仁
许媛媛,梁书秀,毕小奇,薛庆仁
(1.大连理工大学 海岸和近海工程国家重点实验室,辽宁 大连 116024;2.中国建筑工程(香港)有限公司,香港 999077)
在实验室波浪物理试验中常采用激光多普勒测速技术(LDV)、声学多普勒测速技术(ADV) 以及粒子图像测速技术(PIV)等测量波浪水质点速度[1-6]。其中,LDV 和ADV 属于单点或多点测量,它们虽然具有单点测量精度高的优点但难以构建瞬态的全场速度。PIV 是全场测速技术中最为成熟的一种新技术,能够无扰动、精确有效地测量二维或三维全场速度分布,因此更常应用于物理模型实验。
与非破碎波浪试验不同,在波浪破碎物理试验中,波浪破碎会产生显著的气液混合区域,若采用PIV 测量该区域的速度,气泡区会在PIV 图像中过度曝光而形成光斑,使得图像对互相关分析时无法获得该区域正确的速度信息。因此,基于PIV 测量技术,并结合气泡区的特点,Ryu 等提出了气泡图像测速技术(BIV),运用该方法对受到破碎波浪冲击的结构周围掺气区域的速度场进行分析,比较和讨论利用传统的PIV 技术和新的BIV 技术测量的速度场的区别,同时将BIV 测量结果与使用光纤反射测量(FOR)的结果进行了对比验证[7]。Lim 等使用改进的PIV 技术结合气泡图像测速(BIV)技术测量实验水槽中深水卷破波和崩破波速度场,分析了波浪破碎过程的运动特征,计算了破碎过程中波浪动能、势能和总能的变化[8-9]。
可见,BIV 测量技术在对气液混合区速度的测量上有优势。然而其开发时间尚短、实验应用较少,其试验方案仍需讨论,其测量结果也仍需进一步验证。另外,波浪破碎速度场测量试验是较为精细的试验,为了排除重复生成波浪带来的影响,同时测量混合区和其下水体的速度场是必要的。因此,讨论PIV 和BIV 的耦合测量试验条件是极有意义的。
1 图像测速方法原理
1.1 粒子图像测速方法(PIV)
粒子图像测速是流场可视化中的一种测量手段,其基本原理为:在某一时间点T1拍摄流场中质点所在的位置,而后在时间点T2拍摄同一相机位置下质点所在的位置,通过计算出质点在时间间隔内的位移S,最终确定质点速度v。
实际中PIV 并不直接追踪单个粒子质点,而是通过数学统计分析的方式来得出质点位移,一般包括自相关和互相关等计算方法。在自相关算法中,同一粒子两次曝光在一张底片上,速度方向不能自动判别,存在速度方向二义性问题。互相关算法通过对两张连续图片中的查询窗口进行互相关计算,能有效解决自相关中识别两次曝光粒子的问题,现今大多采用多帧单曝光的方式采集图像,并采用互相关算法进行分析计算。在T1、T2两个时间点拍摄的图像中设置询问窗口,使得两个窗口可以进行互相关分析[10]。依据最大互相关系数c(x,y)确定图像中区域的位移,并由此得出流速vx,vy。
1.2 气泡图像测速方法(BIV)
气泡图像测速作为一种对于PIV 的补充测量技术,其主要用于试验中有较多气泡产生的区域。BIV 试验中,由普通灯光照射气泡形成阴影,利用相机拍摄气泡的运动轨迹与结构纹理,并将其中的气泡及气泡结构视作PIV 中的粒子来进行互相关运算。虽然气泡会由于压力变化产生形变,但流体的连续性及1000 帧的拍摄速度使得气泡在短时间内形变很小,故而拍摄得到的图像同样可依据互相关法得出速度场。
BIV 测量中,除灯光对气泡的照明至关重要外,也要求实验者必须提前控制好景深。景深即视场深度(Depth of Field)指的是可以使相机拍摄的目标物体达到图像聚焦清晰时前后的一个范围[11],如图1 所示。

图1 景深示意
依据Ryu 等提出的公式[7],可以表示为:
式中,R 为最近限制范围,S 为最远限制范围,D为景深,L 为相机至聚焦面距离,f 为相机焦距,C为相机模糊圆参数,N 为相机光圈数。

根据公式(4),结合本次试验设备的焦距、光圈值、聚焦距离等参数设置可以得出本次试验采用的拍摄设备其景深及误差,如表1。可以看出本次试验中由设备产生的景深误差在2%以下,表明该设备适用于BIV 的测量,在保证误差尽量达到最小的同时,又保证在现有试验设备下拍摄质量达到最优。另外,本文不仅通过公式(4)对拍摄设备的理论景深误差进行了分析,还利用试验数据对景深造成的误差进行了定量分析。

表1 景深及误差计算
2 图像测速系统的搭建
2.1 试验水槽和仪器
试验在大连理工大学海岸和近海工程国家重点实验室的溢油水槽进行,水槽长22 m,宽0.8 m,深0.8 m,水槽两端有消浪设施,可有效减少波浪反射影响。水槽造波机可生成波浪的周期范围为0.5~3.0 s。
本次试验水深h = 0.5 m,采用能量聚焦的方法产生波浪破碎现象,输入波能按照JONSWAP 谱型在频率间进行分配。频率范围为0.7~1.3 Hz,按照等分频率法将能量在29 份频率间进行离散。聚焦波生成的原理详见梁书秀等的文献[12]。试验工况参数见表2,表中fp为JONSWAP 谱峰频率,A 为输入振幅值。

表2 试验工况参数
试验水槽中,沿波浪传播方向设置8 根浪高仪,详细布置参照毕小奇的文献[13],设置造波板静止位置为x=0.0 m 处,以波浪传播方向为x 正向,由水底至水面竖直方向为y 正向。浪高仪系统记录每次试验中的波面变化,并将采集的浪高数据处理后进行波面比对,确保试验过程中每次波浪生成的准确性和重复性。在x=6.43~9.85 m之间为波浪破碎区域,为防止浪高仪对流场产生干扰,以更好地进行PIV 及BIV 测量,此处未布置浪高仪。试验中使用诺泰科公司研发的小威龙高精度声学单点式流速仪(ADV)测量单点流速用于PIV 和BIV 测量结果的验证。
2.2 PIV 测量系统搭建
PIV 测量系统布置在水槽外侧,由几个典型的子系统组成:片光源系统、粒子生成及供给系统和图像采集系统。试验中搭建的PIV 测量系统的片光源由MGL-W-532 型激光器配合前镀膜光学反射镜生成;图像采集由Photron-SA5 高速摄像机完成;而示踪粒子选用了LaVision 公司的HQ 粒子,粒子比重为1.03 g/cm3,平均粒径为55 μm,在水中有极好的跟随性。
在对破碎流场进行拍摄的过程中,PIV 设备的布置如图2 所示,激光器从底部发射激光线源至全反镜,经前镀膜光学全反镜反射后,形成平行于水槽壁的铅垂激光面,该激光面距离水槽壁20.0 cm,此分隔距离足以避免边壁效应对测量数据的影响。高速相机于水槽侧面对波浪流场进行拍摄。其中,相机放置于水槽一侧可横向移动的车架中,车架下方设置有导轨,确保了在对不同视场拍摄时,相机至激光面的距离一致。车架上方设置有相机云台,该云台为三向三维阻尼云台,可以沿三个方向自由调整角度,并设置有水准气泡。当相机在云台上固定好后,需精确调整云台,使水准气泡居中,以此保证相机拍摄角度垂直于激光面。激光器放置于相机车架前方,设置有四角可调平台及水准气泡,使用中也需调整水准气泡,以使激光入射面水平。

图2 PIV 拍摄布置现场图
2.3 BIV 测量系统搭建
因PIV 在对破碎区进行测量时,产生的大量气泡会造成激光的散射,使图像形成大面积的亮斑,无法对图像进行有效的计算分析,而BIV 以自然光或能量较弱的灯光为光源,恰好适用于气泡区的测量。因此PIV 适用于测量流场无气泡及低密度气泡区的速度,BIV 适用于测量气泡区域速度,二者共同应用才能达到测量破碎波浪速度场的目的。
在BIV 测量中设置合适的光源使得气泡及气泡纹理结构在图像中可以有清晰的影像是试验的重点。标准BIV 光源一般在水槽非拍摄一侧设置灯箱,使得拍摄时可以得到较为柔和均匀的背景灯光,并照射气泡形成气泡阴影轮廓,同时在水槽拍摄一侧也设置灯光,照射气泡,使得气泡区形成更加清晰的明暗对比,得到质量较好的BIV 图像,如图3 所示。这一过程中,为在水槽一侧布置灯光照亮气泡,水槽宽度不能过宽,否则灯光穿透力不足以形成较好的阴影轮廓,同时这也意味着试验拍摄段两侧都必须为玻璃边壁,不能有物体的遮挡,而这对于一些需要设置结构物的试验来讲是极为苛刻的,为此改良标准BIV 的照明方案,使其适应不同情况的实验室及试验条件就变得十分必要。

图3 标准BIV 照明方案布置图(单位:cm)
另一方面,利用标准BIV 照明方案进行测量时无法同时进行该区域的PIV 测量,BIV 和PIV 的分开测量不仅会增加测量的工作量还会因为两次拍摄降低速度场的计算精度。毕竟波浪破碎本身是极度非线性的,很难做到100%的重复性,尤其是气泡区域。为此,本试验将探索BIV 及PIV 的照明方案,尝试以不同的光照方式配合不同强度的激光来对破碎流场中的气泡区进行拍摄,寻找同一次测量中BIV 及PIV 同步拍摄的可能性。如图4 所示,为探索BIV 的照明方案在水槽的前后和上方都布置有光源。为方便表述,将试验中尝试的打光方案进行了分类:在拍摄一侧窗口布置的灯光为前置光源,拍摄区域的另一侧灯光为后置光源,水槽上方灯光为上部光源。将各类灯光方式进行组合拍摄并与标准BIV 照明方案进行结果对比优选出最适合进行BIV 和PIV 耦合测量的照明方案。
图4 BIV 照明方案试验中灯光分类(单位:cm)
3 测量系统验证
3.1 PIV 测量系统验证
为确保本次试验搭建的PIV 测量设备的准确性,通过多个测点布设ADV 测量波浪工况1 的速度历时并与PIV 分析结果进行对比。在PIV 拍摄窗口中布置6 个ADV 测点,由于ADV 测头在水下反光,影响PIV 测量,故先对本窗口使用PIV 测量流速场,而后分别在各个测点布置ADV 测量流速。
为确保ADV 与PIV 测量为同一点,记录ADV测点在图像中的像素位置,确保后期提取PIV 结果时也提取同一测点处的流速数据,ADV 测点布置如图5 所示。所有测点重复测量5 次,每次测量后对比浪高仪波面数据,以确保聚焦时间及聚焦波峰误差在±0.03 s 及1%以内,确保波浪生成的重复性。

图5 (a)#1 ADV 测点实拍图;(b)ADV 测点布置示意图
图6 展示了1—6 号测点PIV 与ADV 测量的水平向流速历时曲线对比,可以看到各测点PIV与ADV 流速曲线基本吻合,证明本次试验中所搭建的PIV 测量设备是准确有效的。

图6 工况1,1—6 号测点PIV 与ADV 水平向流速历时曲线对比
3.2 BIV 测量系统验证
考虑到BIV 测量在实验室中应用还较少,本文设计了基础的气泡试验来验证BIV 测量系统的准确度。验证试验分为静水下气泡上升试验、不同均匀流下气泡上升试验和静水下气泡上升景深验证。
3.2.1 静水时气泡速度 静水验证试验中在水槽底部中央处布置气泡石以均匀释放气泡,气泡石直径为5 cm,因此其上升速度不受左右两侧玻璃边壁的影响,气泡石与配套气泵相连,气泵最大排气量可达8 L/min,并且可以通过旋钮调整进气量,气泡石上均匀一致的气孔随后生成气泡,因此可知气泡初始速度因气孔大小与气泵排气量一定而固定。
使用竖向探头ADV 对气泡上升速度进行测量,ADV 测点布置于气泡石正上方,ADV 测点通过拍摄BIV 图像可以与BIV 的结果进行准确比较。验证试验中,ADV 的信号强度始终保持在150 以上,其相关度保持在85 以上,确保ADV 测得数据的有效性。同时BIV 数据处理中,取ADV 探头下5 cm处(ADV 测量原始测点即为探头下5 cm 处)为图像的原始测点,并选取其像素点附近9 个点的数据平均值作为测点处BIV 的瞬时测量速度。将ADV测量值与BIV 测量值进行对比,发现ADV 瞬时速度均值为0.187 cm/s,BIV 瞬时速度均值为0.193 cm/s,两者相对误差为3.2%。对于使用声学原理的ADV与使用光学原理的BIV 技术,两者对气泡在同一测点的瞬时速度的测量结果趋势一致且较为吻合。3.2.2 水流下气泡水平速度 在进行均匀流气泡上升验证试验前先对水槽造流系统生成流速的可信度进行了检验,之后再进行BIV 及气泡验证的相关试验。试验通过事先率定好的造流系统频率生成了不同大小的流速,接着气泡石从底部按固定的气泵功率输出气泡,并对气泡运动进行BIV 拍摄,测量结果如图7 所示,图中蓝色带三角标记点的线条代表率定的流速。理论上,若产生的气泡与水体有较好的跟随性,则采用BIV 计算测量的气泡水平方向的速度应该与水槽中流速一致。从图7 可以看到,在水流速度小于0.30 m/s 时,BIV 计算速度与水流流速有较好的一致性,且在z =5 cm 及z =27 cm 处的气泡速度也可以保持一致,可以证明BIV 测量水平速度的准确性。值得注意的是,当水流速度大于0.30 m/s 时,在z =5 cm 处的BIV 计算速度并不能与水流速度保持一致,且当水流速度提升至0.35 m/s 时,z=5 cm 及z =27 cm 处速度差异较为明显。这与水流速度大于一定值时,气泡跟随水流运动的速度并不能很快保持一致,而是需要更多的加速距离有关。
图7 运动气泡群中在不同流速下的BIV 测量速度
3.2.3 静水下气泡上升景深验证 在对水槽中的波浪进行BIV 测量时,指定的x-z 平面处的图像气泡信息会被景深前后的模糊图像所遮挡或影响,虽然景深外的图像因为未清晰聚焦,其气泡的明暗对比及纹理结构在互相关计算中的贡献较少,但仍有必要对其进行检测,以验证BIV 中景深内图像数据的准确性。试验首先通过拍摄聚焦清晰的气泡上升图像,随后改变焦距使图像不再聚焦于原平面,对模糊气泡图像进行拍摄,如图8 所示,之后将模糊图像与清晰图像叠加产生新的带模糊前景的BIV图像,分析并计算这三种图像的速度并加以比较。

图8 清晰气泡图(左)和模糊气泡图(右)
由图9 可知,同一点处清晰气泡的速度曲线与模糊气泡的速度曲线并不一致,但两者叠加后图像计算的速度曲线与清晰气泡图像计算的速度曲线较为吻合。此外对三者的速度均值进行了计算,清晰图像均速为0.1872 m/s,模糊图像均速为0.2069 m/s,两者叠加图像均速为0.1865 m/s,清晰图像与模糊图像间均速的误差为10.53%,而清晰图像与叠加图像间均速的误差为0.37%。一定程度上证明在BIV 的计算中,当景深内的清晰图像与景深外的模糊图像叠加时,计算所得结果仍主要为景深内的气泡速度。

图9 清晰、模糊及两者叠加图像BIV 计算速度的比较
4 照明方案探索
利用标准BIV 照明方案进行测量时无法同时进行该区域的PIV 测量,而BIV 和PIV 的分开测量不仅会增加测量的工作量,还会因为两次拍摄降低速度场的计算精度。为此,本试验将探索BIV和PIV 的耦合照明方案,尝试以不同的光照方式配合不同强度的激光强度来对破碎流场进行拍摄,寻找同一次测量中BIV 及PIV 同步拍摄的可能性。
4.1 不同照明方案效果图及速度场分析
为对比不同照明方案的BIV 拍摄效果及最终的处理结果,选取气泡较为明显的破碎时刻和拍摄窗口来进行试验。需要说明的是,各方案的每次拍摄过程都对浪高仪的采集数据进行了对比,将聚焦波峰误差控制在3%以下,相位误差控制在0.03 s以下,确保波浪生成的重复性。同时,在各方案的拍摄过程中都使用了任喜峰基于UDP(用户数据报协议)开发的自动化、同步采集软件[14],并采用一致的相机参数进行同步拍摄。该同步系统将信号的发送和触发命令执行之间的时间控制在1 ms以内,而相机的采样间隔为1~2 ms。在这样的精度下,每次采集都确保了各方案拍摄的是同一工况下、同一时刻的破碎气泡区域。另外,采集到图像后,由于试验中PIV 及BIV 测量系统均为独立搭建,没有直接配套的PIV 及BIV 处理程序,本文使用Matlab 中已较为成熟的、开源的PIV-Lab 来进行速度场的处理计算[15-16]。计算时采用FFT 互相关算法,设置三重查询窗口,初始查询窗口为72×72 像素,最小查询窗口为24×24 像素,子窗口之间的重叠区域达50%。
4.1.1 标准BIV 照明方案 标准BIV 照明方案分析的速度场将为耦合测量方案中气泡区速度场的结果提供验证数据。该照明方案中(图3),主要布置有前置灯两盏(光线与拍摄窗口成60°角)及后置灯两盏,本次试验中灯光功率均为500 W。拍摄效果及处理后的结果如图10 所示:可以看到此时有较清晰的波面、气泡轮廓及纹理结构,气泡区域拍摄效果有较好的厚度感,进行图像处理时无过多噪声;气泡区域前方速度整体较大,后方速度整体较小,最大速度出现于气泡区前方。
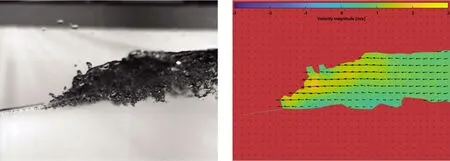
图10 标准BIV 照明方案处理结果(左:原始图像,右:处理后流场图)
4.1.2 激光+前置灯的耦合照明方案 本系列耦合照明方案共设计了3 组(见表3,序号1—3),分别选择10 W、7 W 和4 W 激光+前置灯两盏(光线与拍摄窗口成60°角)进行组合拍摄测量,照明设备示意图见图4,后置灯关闭、激光和前置灯开启。拍摄效果及处理结果如图11 所示:①10 W 激光+前置灯的波面较为清晰,气泡区域上方气泡有较清晰的纹理结构,但气泡区域下方有较多的亮斑,不利于互相关分析。②7 W 激光+前置灯的波面仍可识别,气泡区域无过多亮斑,有很清晰的纹理结构,其最大流速出现位置与标准BIV 照明方案一致。③4 W 激光+前置灯的波面无法通过原始图像识别,气泡区域几乎无亮斑,有较好的结构纹理,最大速度出现位置与标准BIV 照明方案一致。此外对于下部非气泡区,10 W 激光下,粒子效果最好,7 W 次之,4W 激光下从原始图像中无法识别清晰粒子。

图11 激光+前置灯照明方案处理结果(上:10 W 激光,中:7 W 激光,下:4 W 激光)
4.1.3 激光+后置灯的耦合照明方案 本系列耦合照明方案共设计了2 组(见表3,序号4—5),分别选择10 W 和7W 激光+后置灯两盏进行组合拍摄测量,照明设备示意图见图4,后置灯和激光开启、前置灯关闭。拍摄效果及处理后的结果如图12 所示:当激光配合后置灯光时,由于后置灯对气泡呈现效果较好,图像都可以有清晰的波面,气泡区域也可以很好地识别。然而10 W 激光下,气泡区亮斑较多不利于该区域的速度计算。7W 激光下亮斑区域较少,气泡区域有较好的纹理结构,计算的最大速度出现位置与标准BIV 照明方案一致。对于下部非气泡区可以看到7W 激光下粒子效果与10 W 一致,甚至要稍好一些,这与10 W 激光下气泡区亮斑散射对下方粒子成像效果产生影响有关。
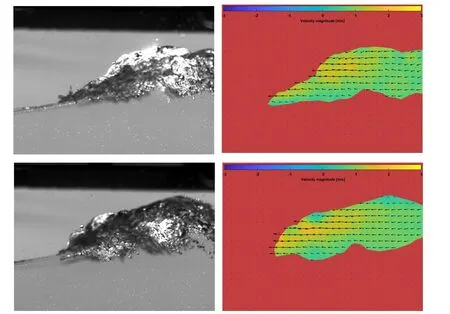
图12 激光+后置灯照明方案处理结果(上:10 W 激光,下:7 W 激光)
4.2 照明方案结果分析
4.2.1 改良方案与BIV 测量结果对比分析 选择最大水平向速度值、平均水平向速度值及平均动能值作为验证参数,定量地检验5 种照明方案测量的气泡区速度与标准BIV 照明方案测量结果的差异。考虑到各照明方案中选取气泡区域稍有差别,为此对于平均速度值及平均动能值使用公式(5)计算:

式中,ui表示计算区域中各网格点处的x 向速度值,vi表示计算区域中各网格点处的y 向速度值,N 为计算网格点数目(因各方案在速度场计算中窗口网格大小一致,N 可以视作方案中的计算面积)。经计算后,各方案的速度参数及动能结果如表3所示。表3 中照明方案0 号为标准BIV 照明方案,照明方案1—5 为设计的BIV 和PIV 的耦合照明方案。
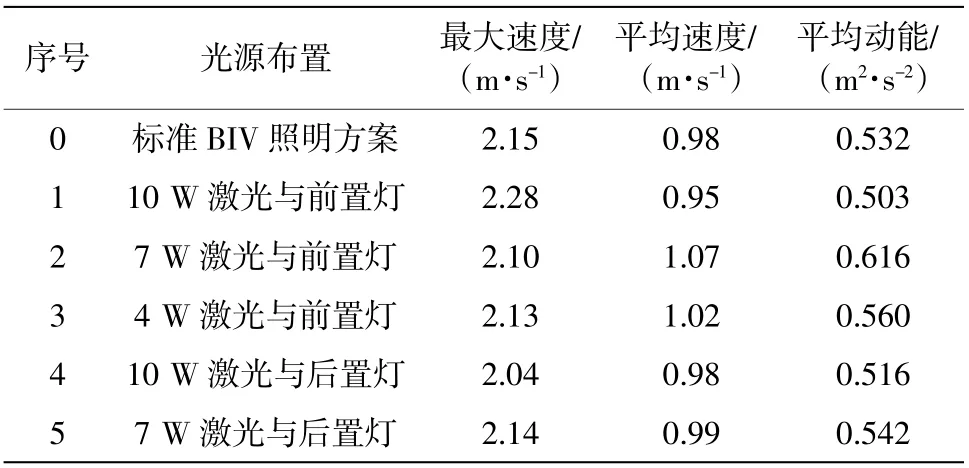
表3 不同照明方案最大速度、平均速度及平均动能计算结果
各照明方案中,2 号、3 号和5 号方案得到的最大x 向速度与标准BIV 照明方案最为接近,误差控制在5%以内。对于平均速度值,计算结果显示各方案差异并不是很大,其中1 号、3—5 号方案的计算结果与标准BIV 照明方案较为一致,误差在5%以内。最后对比各照明方案的平均动能值发现,3 号、4 号和5 号方案的平均动能与标准BIV 照明方案的平均动能误差在5%以内。综合3个验证参数与标准BIV 结果的比较可以看出照明方案3 和方案5 的测量结果更接近标准BIV 测量结果。
为进一步对比方案3(4W 激光+前置灯)和方案5(7 W 激光+后置灯)的气泡区计算速度与标准BIV 照明方案的差异,验证改进方案3 和改进方案5 的测量准确度,选取拍摄窗口内受气泡区影响的点作为考察点,并采集整个破碎过程该点的瞬时速度形成水平向速度历时曲线,通过历时曲线的对比检验整个破碎过程2 种改良方案与标准BIV结果的差异。
图13 展示了2 种改进方案气泡区考察点处x向速度历时曲线与标准方案的对比结果,可以看到2 种改进方案得到的该点处气泡区速度随时间变化曲线与标准BIV 的结果较为一致,方案3 的均方根误差为0.0376 m/s,方案5 的均方根误差为0.0543 m/s。再综合3 种特征参数的分析,认为4 W激光+前置灯、7W 激光+后置灯这两种方案对气泡区速度的测量与标准BIV 照明方案的测量具有相同的精度。
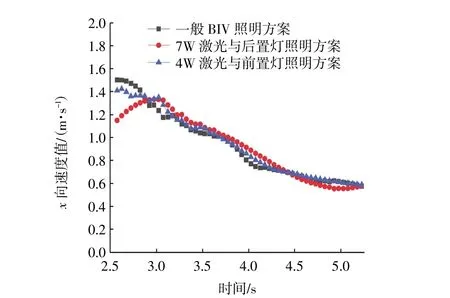
图13 改进方案BIV 考察点处x 向速度历时曲线与标准方案的对比
4.2.2 改良方案与PIV 测量结果对比分析 改进方案的提出是为了找到合适的照明方案达到BIV及PIV 同步拍摄的目的,因此,需要对BIV 测量结果合理的改进方案3(4 W 激光+前置灯) 和方案5(7 W 激光+后置灯) 进行PIV 测量结果的对比。将标准PIV 测量方案(仅10 W 激光)的测量结果作为参考值。选取气泡区下方水体的点作为考察点,并比较该点处x 向速度历时曲线(图14)。可见,对于4 W 激光+前置灯照明方案,其计算速度曲线虽趋势与标准PIV 照明方案一致,但总体数值较小,其均方根误差为0.0764 m/s;而7W 激光+后置灯照明方案,其计算结果与标准PIV照明方案计算结果更为吻合,其均方根误差为0.0254 m/s。

图14 改进方案PIV 考察点处x 向速度历时曲线与标准方案的对比
综上,在改进方案中,耦合照明方案5(7W激光+后置灯)的BIV 均方根误差虽然大于耦合照明方案3,但相对于该气泡区考察点的速度范围(0.57~1.46 m/s),0.0543 m/s 的均方根误差是较小的,说明在气泡区域该耦合测量的精度较高,而耦合照明方案5 的PIV 均方根误差明显小于耦合照明方案3,说明在水体区域该耦合测量的精度也较高。因此,耦合照明方案5 对于本次试验的气泡区与非气泡区计算结果都较为准确,证明了合适的激光与外部灯光配合可以对破碎中的气泡区与非气泡区进行有效的同步测量,即实现了BIV 与PIV 的耦合测量。这将大大减小由于对破碎波分别进行PIV 和BIV 测量所产生的工作量,减小波浪破碎重复生成所造成的速度测量误差。
5 结论
本文从发展有效的波浪破碎两相速度场的测量手段出发,进行了聚焦波浪破碎试验,取得了以下成果:
(1) 在波浪水槽中搭建了PIV 和BIV 系统,并利用ADV 对PIV 和BIV 的测量结果进行了验证,结果表明,BIV 测量的瞬时速度均值与ADV测量结果误差仅为3.2%,且BIV 景深验证结果表明,带前景气泡干扰的图像对分析结果产生的影响仅为0.37%,证明BIV 系统适用于波浪破碎气泡区的速度测量。
(2)根据PIV 和BIV 对光源的需求不同,设置了多种试验照明方案进行波浪破碎速度场耦合测量的探索,最后优选出7 W 激光+后置灯的照明方案,使各项误差均在5%以内,且液相和气液混合相的参考点水平向速度历时曲线也与各自的标准测量方案历时曲线吻合良好,均方根误差小,表明改进方案能够实现PIV 与BIV 的耦合测量。
本文实现的波浪破碎两相速度场的同时耦合测量,有利于缩短测量和分析工作的耗时,并能提高测量精度,减小破碎波浪重复生成的影响。
