Galileo双频精密单点定位精度分析
2022-04-29王新来唐宇鹏
王新来 唐宇鹏
(华北(天津)地理信息有限公司 天津 300000)
Galileo系统的建设于2002年正式开始,截至2016年12月,共发射18颗卫星。Galileo系统可以播发多频信号,为全球多频组合定位提供了多样性[1-3]。近年来,对导航定位性能进行的深入研究,不仅扩展了不同定位系统的研究内容,还对定位模型和各项误差改正不断地进行完善[4-6]。其中,精密单点定位(Precision Point Positioning,PPP)技术不仅定位精度高,操作方便,还可以在无网络区域实现高精度定位,广泛应用于很多领域。因此,对Galileo系统精密单点定位精度的评估十分重要[7-9]。
虽然Galileo系统正式提供服务的时间较短,但国内很多学者都对其定位性能进行了分析。林家乐等[10]基于目前Galileo卫星发射的多频导航信号,比较分析了Galileo双频无电离层组合、双频非差非组合和三频非差非组合PPP的定位性能。结果表明, 对大多数测站,三频PPP静态单日解定位偏差水平方向优于1 cm,高程方向优于2 cm;动态定位偏差水平方向优于5 cm,高程方向上优于10 cm。陈嘉锋等[11]提出了一种利用非组合Galileo三频观测数据的PPP定位算法,分析结果显示,Galileo三频PPP算法在定位精度及收敛速度上均优于传统双频PPP算法,三频非组合模型下的Galileo三频精密单点定位精度较高,较双频精密单点定位精度有明显提升。廖锐斌等[12]从星座可见性、DOP值分布情况和静态PPP定位精度方面对Galileo系统在我国境内的表现进行评估。结果表明,与GPS系统相比,Galileo系统的卫星可见数和PDOP值均较差,国内静态精密单点定位水平精度在3.5 cm以内,高程精度在6 cm以内,而GPS/Galileo双系统组合精度比任意单系统定位精度都高。林超才等[13]提出了一种基于GPS/Galileo双系统伪距、载波相位观测量的精密单点定位模型。分析结果显示, 双系统组合精密单点定位精度较单系统在定位时间和收敛速度方面均有明显提升,对遮挡环境下的导航定位具有一定的参考意义。
本文基于当前对Galileo系统精密单点定位精度的研究,采用KAT1站2020年连续3 d的数据,利用双频无电离层组合模型,分析了Galileo系统E1/E5a、E1/E5b、E5a/E5b和E1/E5 4种双频组合下的静态与动态精密单点定位精度。
1 双频PPP模型
原始的伪距观测值与载波相位观测值可以表示为[10,14-15]
(1)
(2)

本文对天线相位中心偏移、相位缠绕、潮汐和相对论效应等误差对应的模型进行改正,得到双频无电离层组合模型[15]:
(3)
(4)
f为频率。
2 试验及其结果分析
2.1 试验数据及其方案
为充分分析Galileo系统双频精密单点定位精度,本文在众多MGEX站中筛选出KAT1站数据作为本次试验分析数据,观测时间为2020年第66天、第67天和第68天,共计3 d,其中接收机类型为SEPT POLARX5,天线类型为LEIAR25.R3,接收频率为 E1/E5a/E5b/E5,采样间隔为3 s,历元数为2 880。
在进行数据解算时,精密星历与钟差产品采用GFZ中心发布的GBM精密星历与轨道钟差,软件采用根据RTKLIB开源软件改进的程序,PCO、潮汐、天线相位和多路径效应改正采用相应的改正模型,对流层延迟改正则采用Saastamoinen模型,映射函数采用 VMF1 模型。
在进行数据处理时,先对E1/E5a、E1/E5b、E5a/E5b和E1/E5 4种双频组合进行静态精密单点定位数据处理,然后对这4 种双频组合进行动态精密单点定位数据处理。以30 s钟差文件中的坐标作为参考值,便于后续计算Galileo系统双频组合精密单点定位误差和精度[10]。
2.2 静态精密单点定位
以第67天为例,对Galileo 系统4种双频组合数据进行静态精密单点定位处理,计算得到4 种组合下E、N和U方向的定位误差序列,如图1所示。
由图1可知,E1/E5a、E1/E5b和E1/E5 3种双频组合静态精密单点定位在E、N、U3个方向的定位误差最后都收敛至±1 cm之内;E方向定位误差曲线较N方向和U方向更为平滑,N方向定位误差曲线在历元数达到500之后趋于平滑,而U方向定位误差在整个历元间一直处于起伏状态。 E5a/E5b双频组合静态精密单点定位在E方向的定位误差最后收敛至±1 cm之内,在N方向和U方向的定位误差最后收敛至±2 cm之内;E方向定位误差曲线较N方向和U方向更为平滑,N方向和U方向定位误差在整个历元间一直处于起伏状态。

图1 Galileo双频静态精密单点定位误差序列Fig.1 Error Sequence of Galileo Dual- Frequency Static PPP
表1为第66天、第67天和第68天静态精密单点定位E、N、U3个方向的定位精度平均值(RMS)的统计结果。由表2可知,E1/E5a、E1/E5b和E1/E5双频组合静态精密单点定位在E方向的精度优于 0.015 m;在N方向的精度优于0.01 m,在U方向的精度相差较大;E1/E5a组合精度优于0.04 m,E1/E5b组合精度优于0.02 m,E1/E5组合精度优于0.03 m。E5a/E5b组合静态精密单点定位精度相对较差,在E方向和U方向的精度达到了分米级,N方向的精度接近分米级。
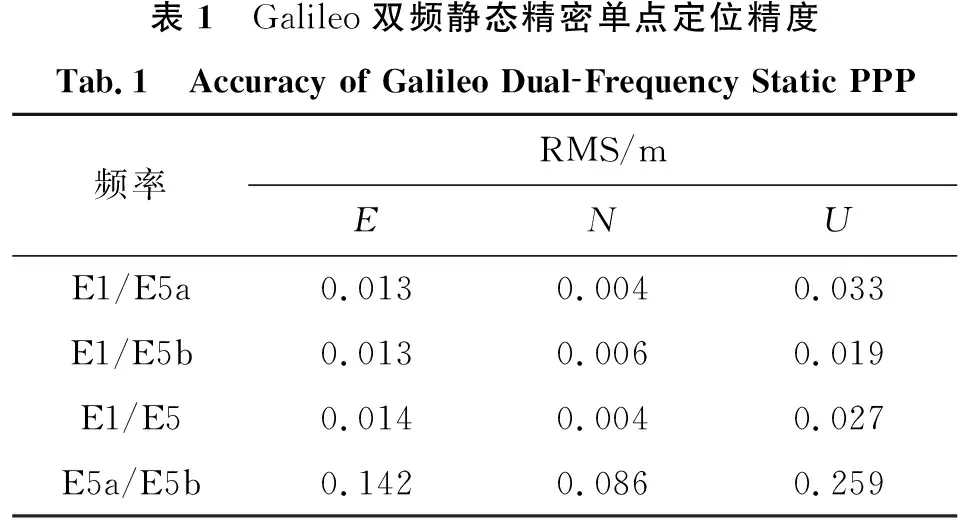
表1 Galileo双频静态精密单点定位精度Tab.1 Accuracy of Galileo DualFrequency Static PPP频率RMS/mENUE1/E5a0.0130.0040.033E1/E5b0.0130.0060.019E1/E50.0140.0040.027E5a/E5b0.1420.0860.259
2.3 动态精密单点定位
同样以第67天为例,采用与静态精密单点定位相同的数据处理方案和分析方法,得到4 种组合在E、N和U3个方向的定位误差序列,如图2所示。

图2 Galileo双频动态精密单点定位误差序列Fig.2 Error Sequence of Galileo Dual- Frequency Dynamic PPP
由图2可知,E1/E5a、E1/E5b和E1/E5双频组合动态精密单点定位在E、N、U3个方向的定位误差大于静态精密单点定位在E、N、U3个方向的定位误差,E方向和N方向的定位误差较平滑,收敛至2 cm之内,U方向定位误差一直在±10 cm之内波动;E5a/E5b双频组合动态精密单点定位在E、N、U3个方向的定位误差波动较大,最大值达到了米级。
表3为第66天、第67天和第68天动态精密单点定位在E、N、U3个方向的定位精度平均值的统计结果。由表3可知,E1/E5a和E1/E5b双频组合动态精密单点定位在E方向的精度优于0.02 m,在N方向的精度优于0.01 m,在U方向的精度优于0.04 m;E5a/E5b组合精度较差,E方向、N方向和U方向精度达到了分米级;E1/E5双频组合动态精密单点定位在E方向的精度优于0.03 m,在N方向的精度优于0.015 m,在U方向的精度优于0.04 m。

表3 Galileo双频动态精密单点定位精度Tab.3 Accuracy of Galileo Dual-Frequency Dynamic PPP频率RMS/mENUE1/E5a0.0160.0090.039E1/E5b0.0130.0090.032E1/E50.0270.0130.039E5a/E5b0.2430.1510.498
综合Galileo系统 4种双频组合精密单点定位精度可知,E1/E5b组合定位精度最优,E5a/E5b组合定位精度最差,可能是因为E5a/E5b组合观测噪声过大,降低了定位精度。因此,在实际应用中,要避免使用E5a/E5b组合进行定位。
3 结 论
基于MGEX提供的多频Galileo实测数据,采用双频无电离层组合分析了Galileo系统E1/E5a、E1/E5b、E5a/E5b和E1/E5 4种双频组合的静态与动态精密单点定位精度,结果表明:
1)对于静态精密单点定位,E1/E5a、E1/E5b和E1/E5双频组合精密单点定位在E、N和U3 个方向的定位误差都收敛至1 cm之内,其中,E方向的精度优于1.5 cm,N方向的精度优于1 cm,U方向的精度较差,在3 cm左右;E5a/E5b双频组合定位误差相对较大,其静态精密单点定位精度达到了分米级。
2)对于动态精密单点定位,E1/E5a、E1/E5b和E1/E5双频组合精密单点定位水平定位误差收敛至2 cm之内,高程定位误差在10 cm之内波动;E5a/E5b双频组合定位误差相对较大,其动态精密单点定位精度都达到了分米级,最大定位误差在米级。
