基于CFD 的民用飞机水上迫降动力学仿真研究
2022-04-28罗文莉陈皓宇
罗文莉 陈皓宇
(上海飞机设计研究院飞机结构强度工程技术所,上海 201210)
水上迫降是指陆基飞行器在水面上的可控紧急降落,属于典型的入水冲击问题,世界各国民用运输机适航条例均要求跨水域飞行必须通过水上迫降适航审定。早在1929 年,Karman[1]就对水上飞机入水冲击的水载荷进行过理论研究,早期众多理论方法都集中于研究二维物体垂直入水问题,但对于复杂三维民用飞机的水上迫降问题,理论分析无法得到应用。1940 年代开始,国外相继开展了一系列动力相似模型试验,用以研究民用飞机水上迫降特性[2-3]。然而动态模型试验具有较强的随机性,且无法准确模拟气动力的影响,同时也无法较好地解释迫降过程中的作用机理。20 世纪后期,随着计算理论和计算机硬件技术的发展,成本低廉且展示度高的数值仿真方法逐步取代了模型试验。越来越多的研究通过数值仿真方法模拟飞机水上迫降,在此过程中不断总结提炼[4],逐渐完善仿真方法,使之成为未来研究水上迫降问题的重要手段。
绝大部分的数值仿真均基于以下几类方法:面元法(panel method, PM),有限元法(finite element method, FEM),光滑粒子水动力学法(smooth particle hydrodynamics, SPH) 和有限体积法(finite volume method, FVM)。2001 年,Vladimir 等[5]基于动量守恒原理采用PM 对福克614 飞机的水上迫降压力、变形和漂浮特性开展了研究。2008 年,Shoji等[6]基于LY-DYNA 软件使用FEM 对缩比机身等直框段垂直入水进行了模拟,压力峰值数据和试验吻合较好但时间历程相差较大。2010 年,贺谦等[7]研究了水平速度、下沉率、俯仰角对迫降时飞机机身载荷的影响,但仿真方法未经验证。2013 年,徐文岷等[8]采用FEM 考虑了水、空气和飞机结构之间的耦合作用,对民用支线飞机水上迫降进行了模拟,但得到的入水初期运动姿态与试验相差较大。SPH 方法由于其不依赖网格的特点优势在水上迫降仿真中得到了应用。2006 年,Climent 等[9]针对CN-235 飞机的研究表明在水上迫降这一类以水平速度为主导的运动中,以本构方程为控制方程的SPH 法无法模拟出气穴效应和负压力,从而影响对运动姿态和冲击力的模拟。之后,文献[10-12] 开发了基于弱可压缩连续方程为控制方程的SPH,模拟负压的精度得到了提升。
PM 计算的原理一般是基于动量守恒或势流理论,忽略黏性、可压缩性、重力和气垫效应等等,多用于简单外形的物体入水问题,在精确描述民用飞机水上迫降动力学问题时存在一定难度。FEM 绝大部分基于商用有限元分析软件,对于气动力的模拟存在困难,另外,计算结果依赖于流固耦合算法,常见的问题是容易引起流体渗漏,导致流体和固体载荷不统一。SPH 避免了由于网格划分产生的问题,但在流体与固体的边界处理上存在较大难度,在模拟精度上存在劣势,且建模复杂度较高。实际水上迫降过程中,飞行速度必须维持在可以保持飞机平稳下降的水平,气动力的影响无法忽略。此外,由空气和水面压差导致的机身尾部的吸力也是影响迫降运动状态和全机载荷的重要因素,因此FVM 具有较大的优势。
2007 年,Streckwall 等[13]使用基于FVM 和流体体积(volume of fluid, VOF)法的COMET 软件对飞机水上迫降过程进行了模拟,对比试验表明计算结果较为准确,并直观体现了飞机入水过程中的水面运动和飞机表面压强分布;2012 年,Zhang 等[14]模拟了一种支线客机的水上迫降过程,表明吸力对于飞机水上迫降的姿态影响较大,且空气模型是吸力产生的必要条件。同一时期,屈秋林等[15]和Guo等[16]详细地研究了尾吊高平尾、翼吊低平尾和翼身融合三种不同布局飞机的水上迫降特性,认为正常布局飞机的低平尾具有抑制飞机过度上仰的作用,从而有利于减缓过载和局部压力。2019 年,吴宗成等[17]基于FVM 采用滑移动网格研究了波浪对水上迫降特性的影响。由于水上迫降过程中的水平位移较大,目前基于FVM 的方法大多采用动网格实现对运动过程的模拟,通过网格变形和重构模拟飞机和计算域的运动,需消耗庞大的计算资源。本文在已有FVM 方法的基础上采用全流场运动网格的方法,添加约束保持水面高度不变,使流场相对水面自由运动,大大缩减了计算量。首先通过典型算例对该方法进行验证,然后模拟分析了某型飞机的水上迫降运动过程。
1 仿真方法
本文采用ANSYS FLUENT 软件,基于非定常RANS 方程,使用加强壁面处理的可实现k-ε湍流模型,压力速度耦合采用SIMPLEC 算法。各控制方程中扩散项采用二阶中心差分格式离散,动量方程的对流项采用三阶守恒律的单调迎风格式,湍动能、湍流耗散率和能量方程对流项采用二阶迎风格式离散,非定常项采用一阶隐式格式离散,水气体积分数离散采用Modified HRIC 格式以精确捕捉水气界面。采用全流场运动网格模拟模型和周围的流场运动。在空气和水面两相流的界面定义中运用了VOF模型,即同一个网格内空气和水的体积分数之和为1,对于第1 相流空气的体积分数v1,如果一个网格中的v1= 0 表示不存在空气,v1= 1 表示该网格中只有空气,0< v1<1 则该网格中同时存在空气和水。使用用户自定义函数定义水面位置和流场初始压力分布。同时使用六自由度模型求解平动和转动方程确定模型的位置和姿态。当模型为对称运动时,可将侧滑和滚转方向的运动约束住,从而简化为三自由度模型,方程为
式中,Vi表示x或y方向的速度,Fi表示x或y方向的合力,t表示时刻,m表示质量,M表示俯仰力矩,I表示俯仰惯量,θ表示俯仰角,n和n −1 分别表示当前和上一个时间步长。由此可获得模型当前的位置和姿态为

2 二维垂直入水算例
2.1 算例参数
首先对两个典型的简单二维模型垂直入水进行模拟,模型参数和试验数据均取自试验[18-19]。算例中,圆柱直径200 mm,高度200 mm,重12.5 kg,入水速度为0.989 m/s,在圆心角0◦,7.5◦,15◦和30◦的位置布置了压力传感器;楔形体长333 mm,截面宽度80 mm,高度45 mm,楔角20◦,重1.639 kg,入水速度为1.28 m/s,采用高速摄像设备获取运动过程中的位移和速度参数。图1 所示为试验相关设备及模型参数。

图1 二维算例试验示意图(续)Fig.1 Experiment diagram of the two-dimensional example(continued)

图1 二维算例试验示意图Fig.1 Experiment diagram of the two-dimensional example
2.2 求解过程
2.2.1 流场设置
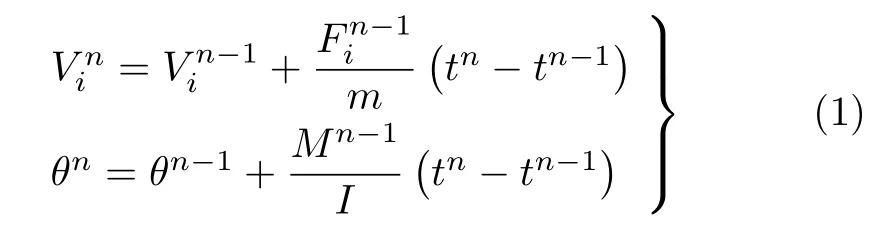
对计算域进行网格划分,由于模型均左右对称,因此计算时采用半模,对模型附近尤其是底部与水面交界处的网格进行适当加密。对称面采用对称边界条件,模型为无滑移壁面条件,其余边界均为压力入口边界条件。计算域的网格划分结果如图2 所示。
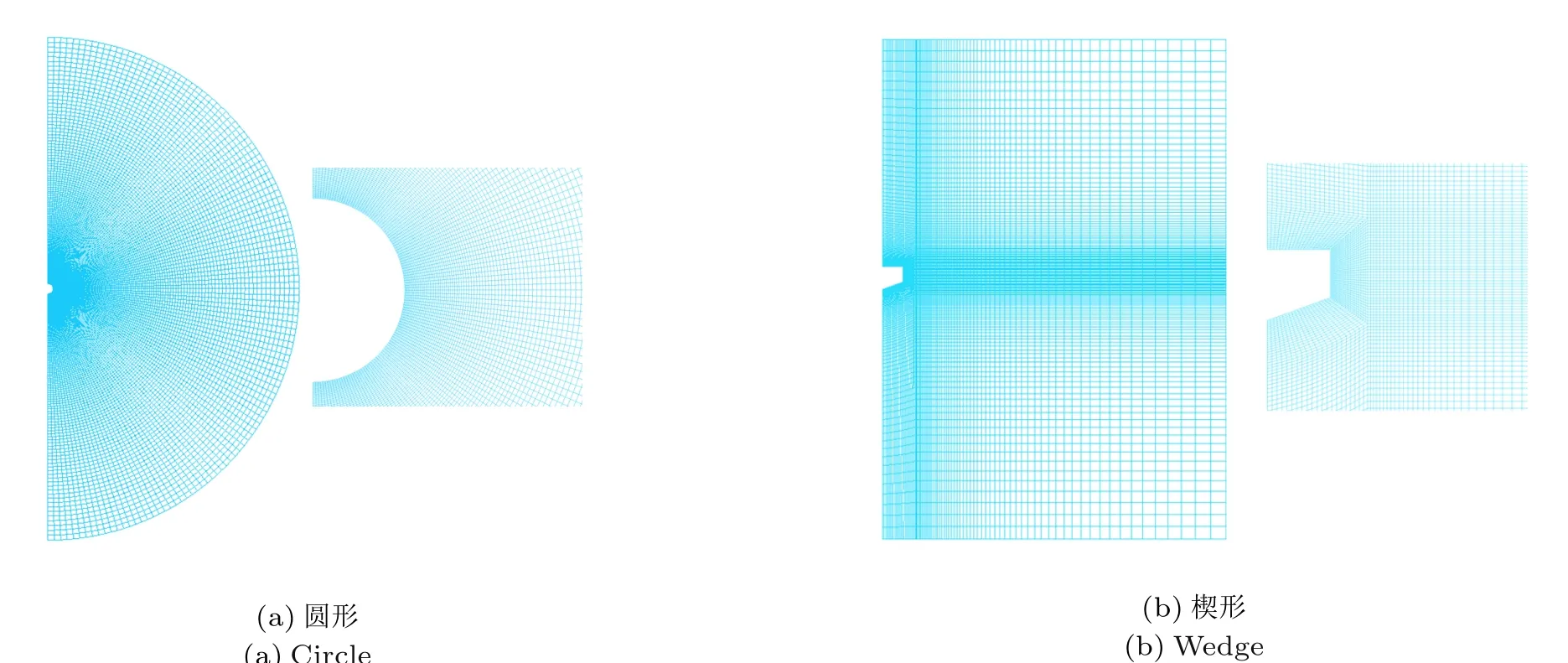
图2 二维算例流场网格Fig.2 Mesh of the two-dimensional example
2.2.2 时间步长设置
采用第1 节中的方法进行求解参数设置。由于入水过程为动态变化过程,时间步长的设置需要兼顾对运动特征的捕捉、计算稳定性以及计算效率。为了保证计算稳定性,需在每一个时间步长内迭代计算达到收敛,然后开始下一个时间步长。因此时间步长应选定一个合理的区间,太大或太小都可能会导致无法收敛。在确定数值时一般会参考特征长度除以特征速度得到的特征时间,在此基础上低两个数量级。另外由于入水冲击过程中速度变化较为剧烈,因此可将时间步长设置为可变的,设定最大和最小时间步长以及步长变化系数,计算过程中根据收敛情况自动更改时间步长。以二维圆形算例为对象,特征长度为0.2 m,特征速度为0.989 m/s,计算特征时间约为0.2 s,将初始时间步长设置为10−4s,分别对最大时间步长10−2s,10−3s,和10−4s 进行影响研究。图3 所示为不同时间步长计算得到的圆弧角0◦(即最低点) 压力系数Cp与试验结果的对比,可以看出,不同时间步长下,对于压力峰值和变化趋势的捕捉结果基本一致,在入水后期由于速度大幅降低,压力数值较小,计算结果出现小幅波动,但此时并不是冲击问题的关注点,影响可以忽略。综上,将时间步长设置为可变的可以降低计算结果对时间步长的依赖性,同时保证计算精度。考虑到计算效率,可以适当增加最大时间步长,因此在后续的计算中,采用初始时间步长10−4s,时间步长范围设定为10−3s~10−6s。
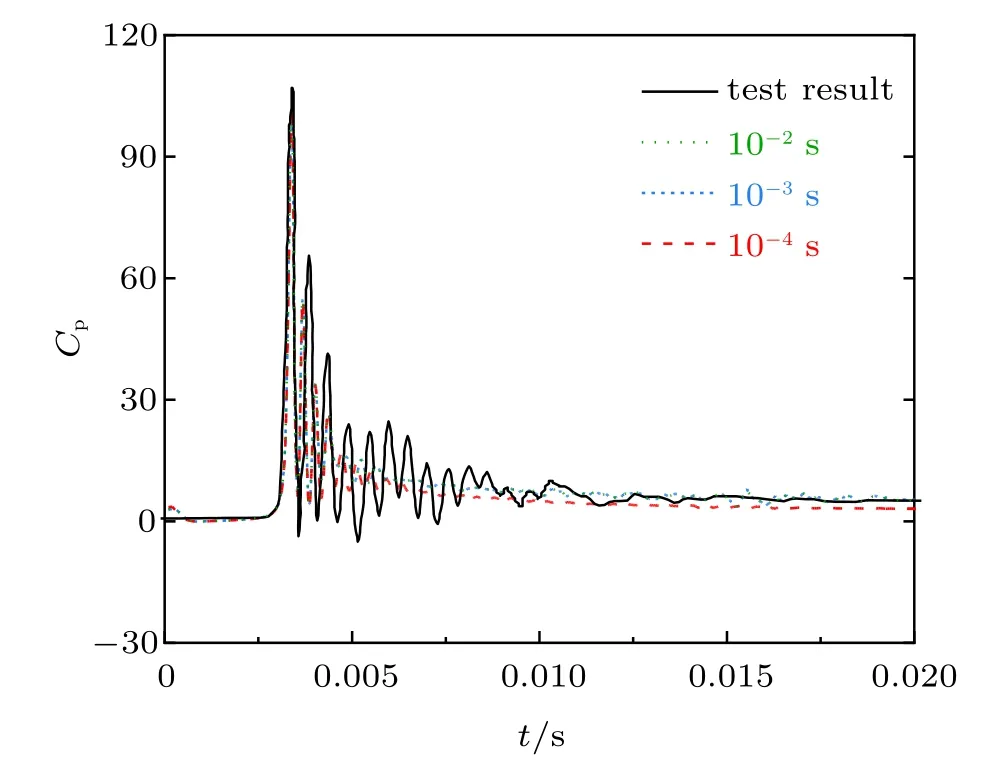
图3 不同时间步长压力计算结果对比Fig.3 Pressure results of different time step
2.3 仿真结果
图4显示了圆形入水过程中圆弧角0◦(即最低点) 与7.5◦位置压力数据的计算结果与试验结果对比,图5 显示了楔形入水过程中位移、速度的模拟结果和试验结果对比,可以看出该仿真方法对于压力峰值、压力变化趋势、垂向位移和垂向速度均能够达到较高的准确度。


图4 圆形入水压力结果对比Fig.4 Pressure comparison of circle example

图5 楔形入水结果对比Fig.5 Result comparison of wedge example
在工程实际应用中,不仅关心飞机在水上迫降过程中运动和受力情况,同时也需关注水面变形情况,为确定水线位置以及后续的漂浮特性提供依据。因此能否准确模拟水面位置和动态变化趋势也十分重要。图6 所示为仿真与试验中模型入水过程中水面变化情况的对比,水面的变形过程得到了很好的复现。虽然无法捕捉到液体的破碎和喷溅,但这些现象对于宏观运动趋势影响较小,在更关注运动姿态和受力形式的飞机水上迫降问题研究中可以忽略。
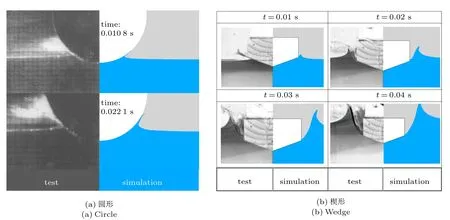
图6 水面变形对比Fig.6 Water surface deformation comparison
3 三维水上迫降算例
3.1 算例参数
仿真方法经过简单外形的验证之后,为了考虑更接近真实情况的复杂外形和三维效应,对水上迫降典型算例NACA TN 2929 模型试验[3]进行了仿真模拟。该经典试验中研究了多种机身外形对迫降特性的影响。选取其中更接近民用飞机后机身外形的Model F 进行建模,如图7 所示,该模型长1.2 m,翼展1.68 m,襟翼偏角60◦,重5.67 kg,飞行速度9.144 m/s,初始俯仰角10◦。

图7 三维算例模型Fig.7 Model of three-dimensional example
3.2 求解过程
由于试验时飞机为对称运动,建模时采用半模,机体表面网格如图8 所示,对称面采用对称边界条件,机身表面采用无滑移边界条件,其余边界均为压力入口边界条件。所有网格均为六面体结构网格,网格总数约240 万,计算初始时间步长为10−4s。

图8 三维算例网格Fig.8 Mesh of the three-dimensional example
3.3 计算结果
图9所示为模拟与试验的对比结果,其中实线表示试验数据,虚线表示仿真结果。可以看出俯仰角和重心高度的变化趋势总体上非常吻合。飞机开始触水即0~t1时刻,重心高度随着入水深度的增加逐渐降低,之后由于俯仰角逐渐增大,而重心位置靠近前机身,因此高度也随之增加。t2时刻开始,俯仰角逐渐减小即飞机逐渐低头,飞机在气动升力和水面浮力作用下保持在水面上滑行,入水深度变化较小,高度随俯仰角的降低而减小。t3时刻开始前机身逐渐入水,受到冲击力俯仰角略有增大,但变化幅度较小,同时飞机在浮力和重力作用下绕重心上下浮动,因此重心高度逐渐趋于稳定。
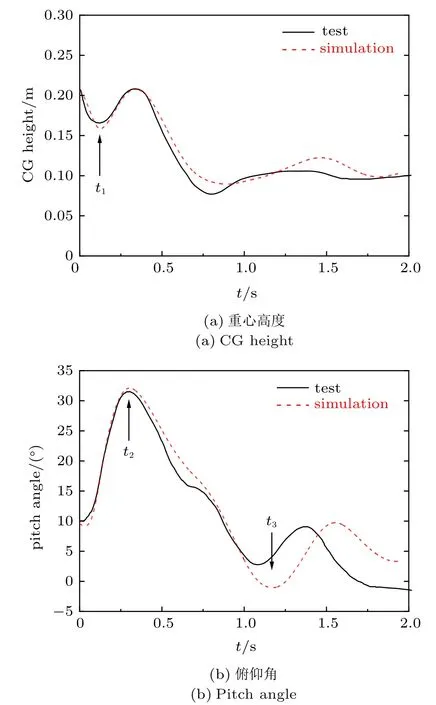
图9 三维算例结果对比Fig.9 Results comparison of the three-dimensional example
4 某型支线飞机水上迫降模拟
4.1 参数设置
经过以上几种算例的验证,将该方法应用于某型支线飞机的水上迫降过程,进行仿真模拟。试验相关参数和数据取自文献[20]。参考缩比模型试验中的参数设置,模型重37.88 kg,飞行速度为17 m/s,初始俯仰角为9◦。同样该飞机水上迫降过程可认为是对称运动,依然选择半模进行计算,模型采用全封闭的发动机短舱,襟缝翼为着陆构型。流场网格划分结果如图10 所示,边界条件设置与第3 节相同。
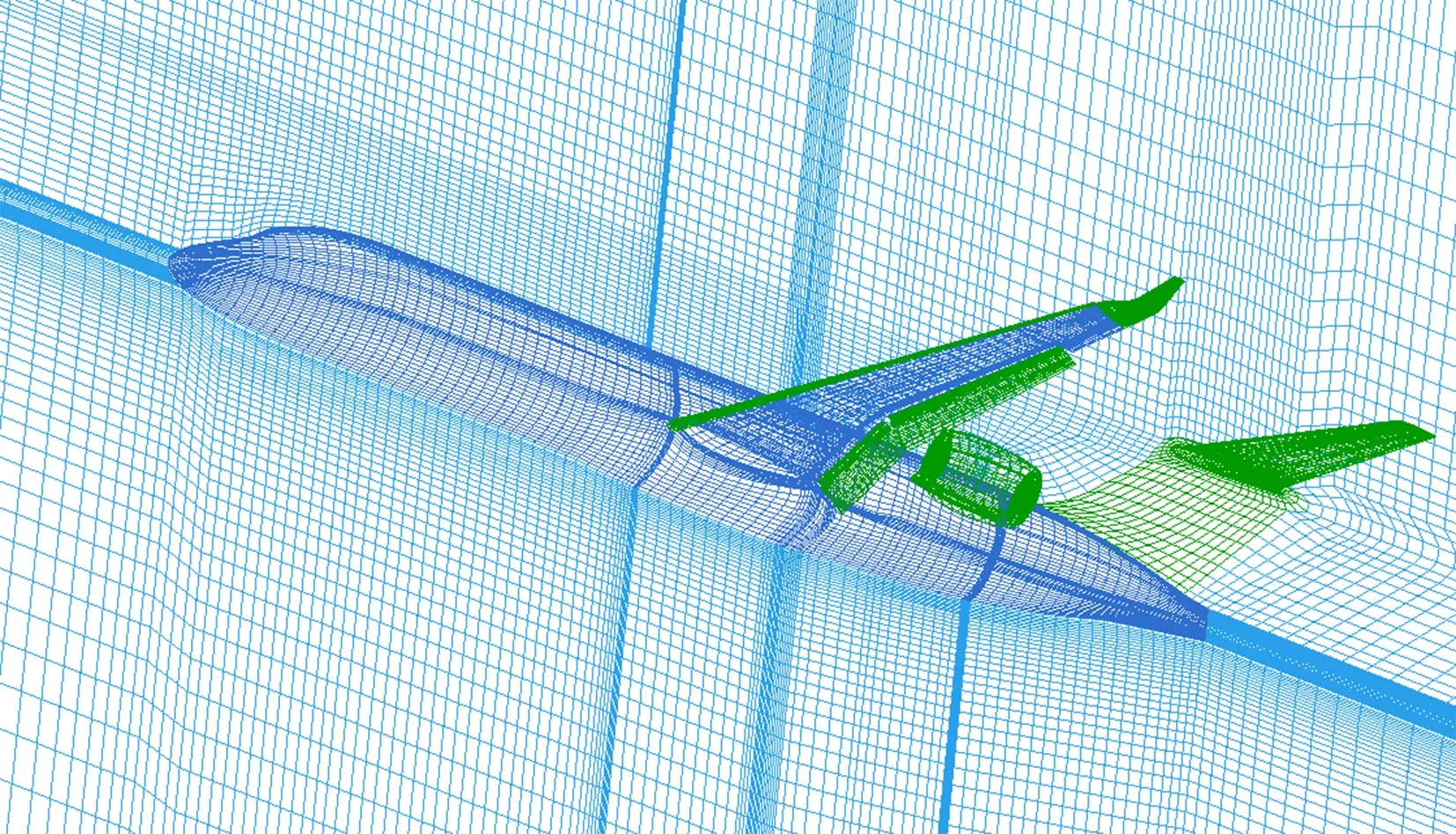
图10 某型支线飞机流场网格Fig.10 Mesh of the regional aircraft
4.2 计算结果对比
图11所示为计算得到的俯仰角和重心处垂向加速度随时间的变化曲线与试验对比结果。俯仰角变化趋势与第3 节中的经典模型类似,经历了两次明显的上仰过程。重心处垂向加速度在入水后约0.15 s出现峰值,随后出现波动并逐渐趋于0◦。俯仰角和加速度峰值的模拟数据与试验值误差分别为1.5%和4.5%,表明模拟结果能够较好地反映水上迫降运动过程和模型整体受力情况。
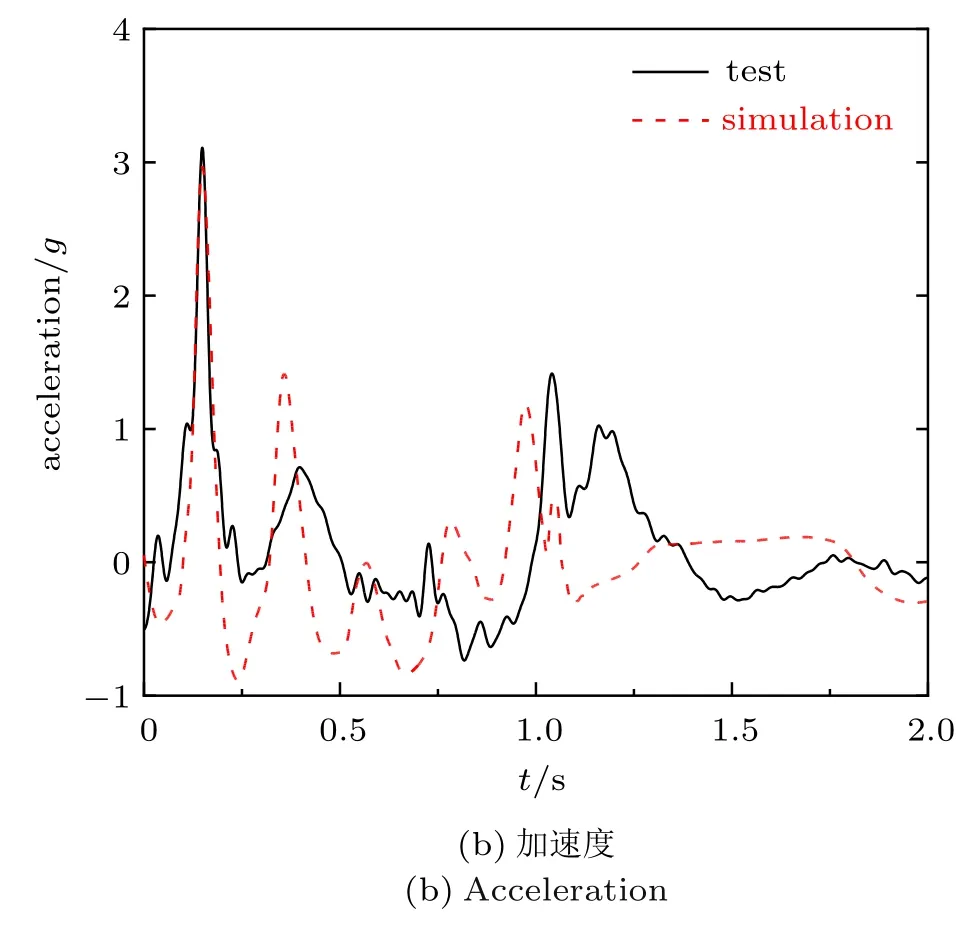
图11 支线飞机结果对比(续)Fig.11 Results comparison of the regional aircraft (continued)

图11 支线飞机结果对比Fig.11 Results comparison of the regional aircraft
4.3 运动过程和受力分析
4.3.1 运动过程
结合图12 中的水线位置和机体表面压力变化过程,可见0.2 s~0.6 s 之间,后机身和发动机短舱底部大部分区域均有明显的负压,产生较强的后体吸力,这是使得俯仰角增大的主要原因。从图11(b)加速度曲线可知此时飞机的加速度到达峰值,虽然合力仍表现为向上的冲击力,但由于负压区更靠近尾部,力臂更长,因此合力矩表现为抬头力矩。

图12 迫降过程中的水线位置和压力分布Fig.12 Water surface position and pressure distribution during ditching
0.6 s 左右俯仰角达到第一个峰值约32◦。由于该支线飞机采用T 型尾翼,高置平尾,因此即使俯仰角到达峰值时平尾仍然位于水面以上,局部喷溅的水花对平尾的冲击力较小,无法起到抑制俯仰角继续上仰的作用。0.6 s 以后,由于巨大的水阻力使得滑行速度迅速降低、后体吸力减弱,同时中后机身以及发动机短舱着水部位受到较大的冲击力,产生低头力矩,从而使得飞机逐渐低头。过程中飞机持续下沉,中后机身和发动机不断排开水面,冲击力出现小幅增大。
0.8 s~1.0 s 之间,随着飞机的低头前机身逐步入水,在此过程中受到较大的冲击力产生抬头力矩,使得1.0 s 以后加速度和俯仰角均出现第二次峰值,但由于此时速度已经大幅度降低,第二次峰值相较第一次有明显降低。此后飞机逐渐趋于稳定,1.2 s时机身底部的压力分布已经显著降低且分布较为均匀。
4.3.2 受力分析
图13(a) 给出了整个机身以及机身尾部受到的法向力随时间的变化曲线,t= 0 s 时刻机体开始着水,可以看到法向合力的变化趋势与图11(b) 的过载曲线一致,并且机身尾部受力始终为负且峰值达到约−1100 N,后体吸力作用明显。在着水1.2 s 以后受力逐渐趋于稳定,表明飞机逐渐停止上下沉浮运动。图13(b) 所示为飞机的俯仰力矩随时间的变化曲线,使飞机抬头为正。入水初期俯仰力矩迅速增加,飞机出现第一次抬头,随后俯仰力矩产生波动并逐渐减小,对应图11(a) 中抬头趋势逐渐平缓,0.6 s以后低头力矩逐渐减小,对应图11(a)中低头趋势也逐渐平缓。0.8 s 以后,与运动过程分析一致,俯仰力矩再次增加从而产生第二次抬头运动,1.2 s 后俯仰力矩趋于0 表明飞机逐渐停止俯仰运动,达到静止状态。
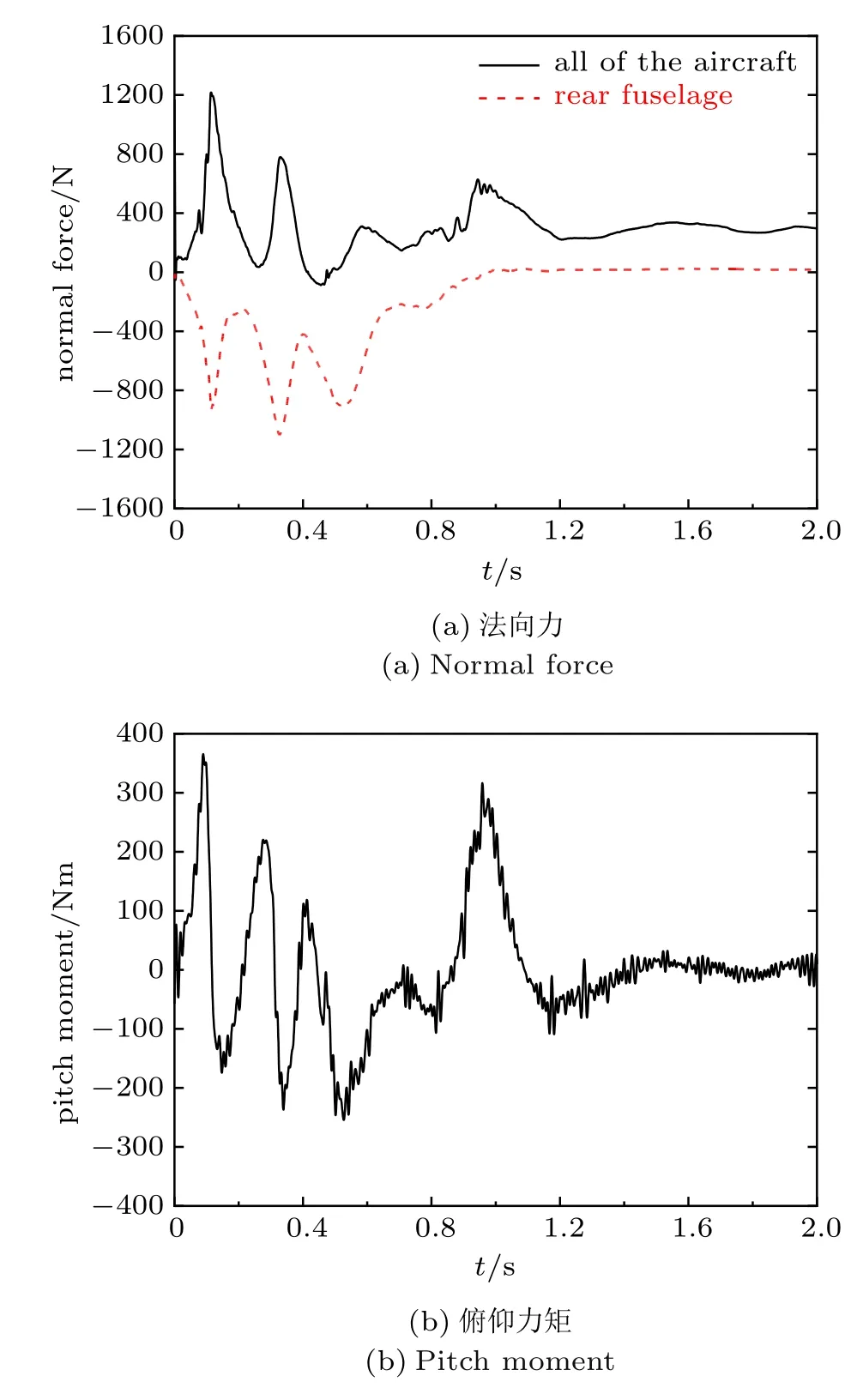
图13 迫降过程中的受力随时间变化Fig.13 Time history of force during ditching
5 结论
通过对圆形和楔形垂直入水以及三维飞机入水试验的模拟,基于全流场运动网格的CFD 水上迫降仿真方法得到了验证。利用该方法研究了某型支线飞机水上迫降的运动和受力特性。结果表明仿真得到的俯仰角和加速度数据均与试验值相近,对后体吸力的准确模拟证实了其对于迫降运动状态和受力特点的重要影响。通过对仿真结果的进一步分析表明,尾吊−高平尾布局的支线飞机在水上迫降时,后机身和发动机短舱底部的后体吸力会导致飞机产生明显的抬头,由于平尾高置无法抑制抬头,俯仰角峰值会达到30◦以上,入水后期水阻力使得速度减小,从而减弱吸力,使得飞机逐渐低头并在较小的波动后逐渐趋于平稳。针对民用飞机水上迫降特性的研究目的,本文目前仅完成了方法的验证和典型迫降工况的分析,对于俯仰角、气动力等不同因素的影响研究还需持续开展。
