列车滚子轴承表面缺陷机器视觉检测方法研究
2022-04-28张袁祥李嘉楠
石 炜,张袁祥,李嘉楠
(内蒙古科技大学机械工程学院,内蒙古 包头 014010)
1 引言
列车滚子轴承是铁路列车的一个关键部件,轴承故障是影响行车安全的一个重要因素,因此有关部门十分重视轴承质量的检测。传统的人工检测方法主要依赖于工作人员的经验、责任心等,长时间的劳动使得检测的结果准确性较差,而且无法将检测到的数据存储、上传及统计分析[1−2]。
针对这种情况,这里对已有研究作出了改进,提出了一种基于机器视觉的列车滚子轴承表面缺陷检测方法,工作流程,如图1所示。
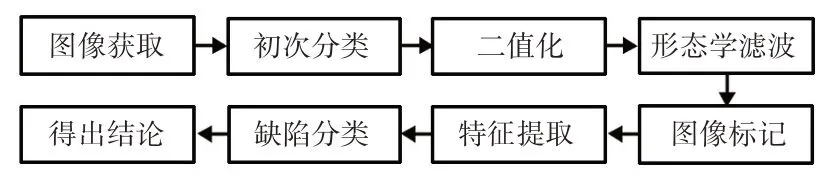
图1 工作流程图Fig.1 Flow Chart
2 图像获取及初次分类
2.1 图像获取
传统的人工检测方法中,工作人员长时间观察滚子轴承内圈外表面容易产生视觉疲劳,这对工作人员的眼睛有一定的伤害,而且会造成检测误差,因此这里提出采用工业内窥镜代替人眼进行图像的获取,将拍摄到的图像存入数据库系统,同时用工控机代替人脑进行分析[3]。
将经过清洗的轴承放置在可控的旋转台上,通过工业内窥镜上的图像传感器可以获取到清晰的轴承表面图像,将图像输入到计算机中,经过图像分析便可得到轴承表面的缺陷类型,系统结构,如图2所示。

图2 系统结构图Fig.2 System Structure Diagram
2.2 初次分类
这里研究五种轴承表面主要缺陷:麻点、辗皮、划伤、擦伤和凹痕,通过工业内窥镜得到此五种缺陷图像及无缺陷轴承表面的图像,如图3所示。
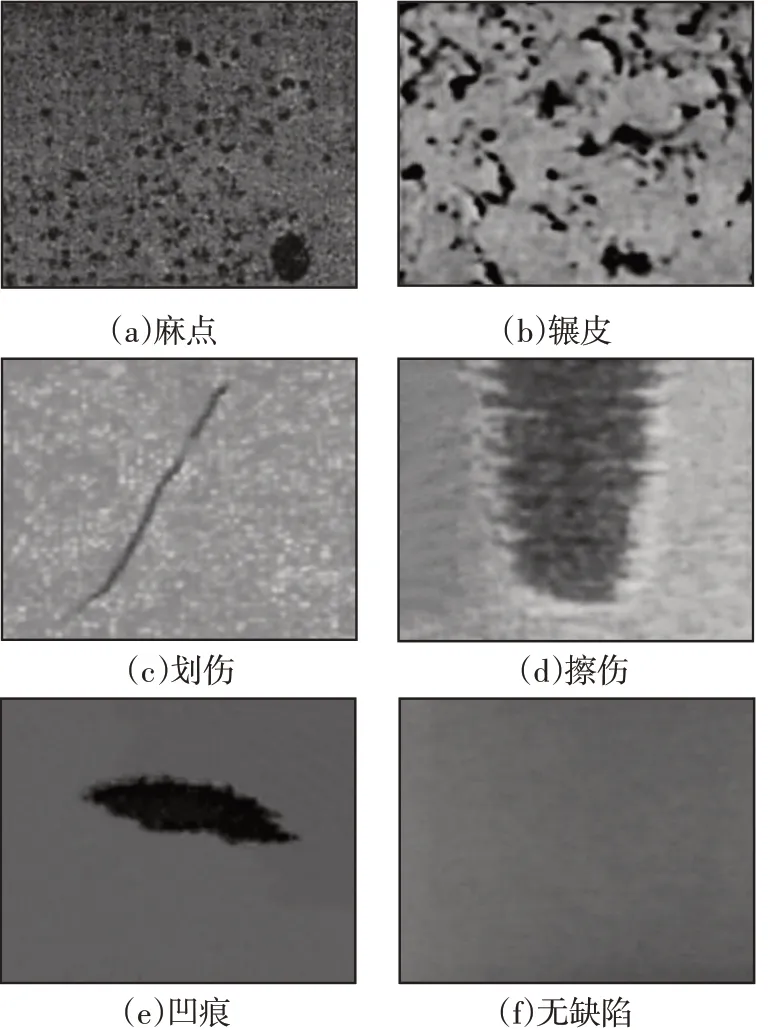
图3 轴承表面图像Fig.3 Bearing Surface Image
灰度直方图描述了一幅图像的灰度级统计信息,通过直方图可以很直观地看到图像灰度值的分布情况,完好图像的灰度值比较集中,而缺陷图像的分度值比较分散。使用MATLAB 图像处理工具箱中的函数可以得到图像的均值和标准差,根据标准差的大小来判断轴承图像是否有缺陷[3]。
无缺陷图像的灰度标准差明显小于缺陷图像的标准差,如表1所示,这证明根据图像灰度值的标准差来判断图像是否有缺陷的方法是可行的,该方法可以对轴承进行初次分类,接下来仅对缺陷图像进行处理即可。

表1 图像灰度标准差Tab.1 Image Gray Standard Deviation
3 二值化及形态学滤波
3.1 二值化处理
使用这里方法进行二值化处理后的图像,如图4所示。

图4 二值化处理Fig.4 Threshold Segmentation
进行特征提取之前,首先对缺陷图像进行二值化处理。目前,常用的二值化处理方法有自适应阈值法、人工选择阈值法、迭代选择阈值法等,其中人工选择阈值法的二值化视觉效果最好,但是需要工作人员的参与,而且要用不同的阈值不断试验来选取最优,比另外两种方法花费时间更长[4]。
这里提出一种根据缺陷图像的灰度均值范围确定阈值的方法,实验证明,该方法既快速又实用。对获取到的300张图片进行二值化处理,五种主要缺陷的灰度均值和人工选择阈值的范围,如表2所示。
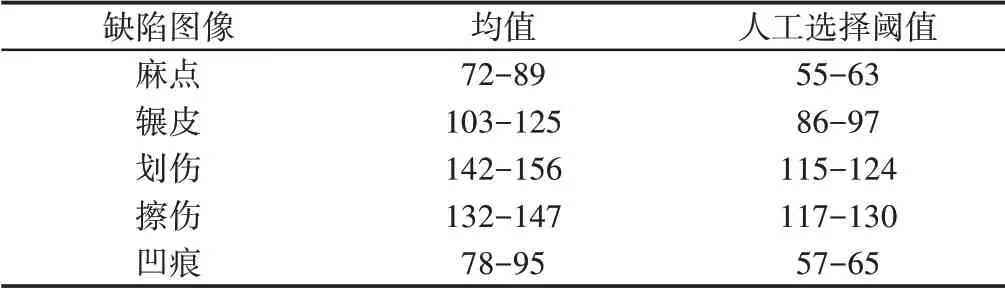
表2 图像灰度均值及最优阈值Tab.2 Image Gray Mean and Optimal Threshold
由上表2可以看出,不同缺陷图像的灰度均值范围和人工选择阈值法确定的阈值范围并不相同。
本方法的核心思想是在缺陷图像进行二值化处理之前,首先进行灰度均值计算,根据不同均值范围,使用不同的阈值进行二值化处理[5],阈值选择规则,如表3所示。
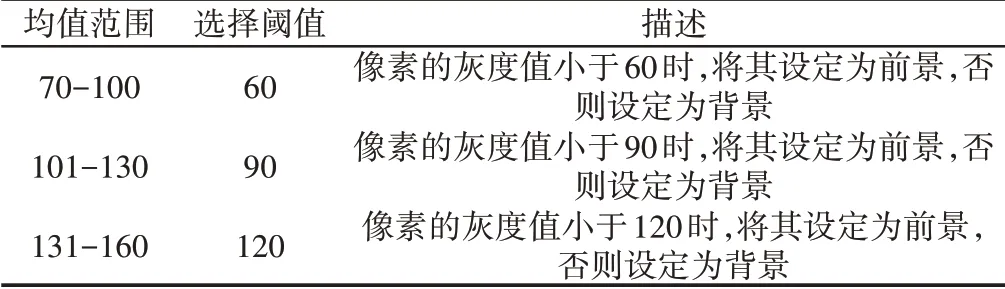
表3 阈值选择规则Tab.3 Threshold Selection Rule
3.2 形态学滤波
由于图像获取过程中光照不均或者轴承清洗不干净等原因,导致获取到的图像会有噪声的产生,这是图像采集过程中难以避免的。这里对二值化处理后的图像进行形态学滤波,这既可以去掉多余的噪声点,又保留了缺陷图像的主要特征,为特征提取带来了极大便利。
形态学基本运算包括腐蚀、膨胀、开运算和闭运算四种,各有其作用和优势,用于图像处理的效果也不同,通过实验对二值化的图像分别进行处理,最终选择闭运算作为这里形态学滤波的基本运算。
由于结构元素的选取在形态学处理中占有极其重要的地位,所以对多种不同的结构元素分别进行对比实验,最终选择[0 0 1 0 0;0 1 1 1 0;1 1 1 1 1;0 1 1 1 0;0 0 1 0 0]作为这里算法形态学处理中的结构元素,实验证明,此结构元素对于二值化后的图像滤波效果最好,经过形态学滤波处理后的二值图像,如图5所示。
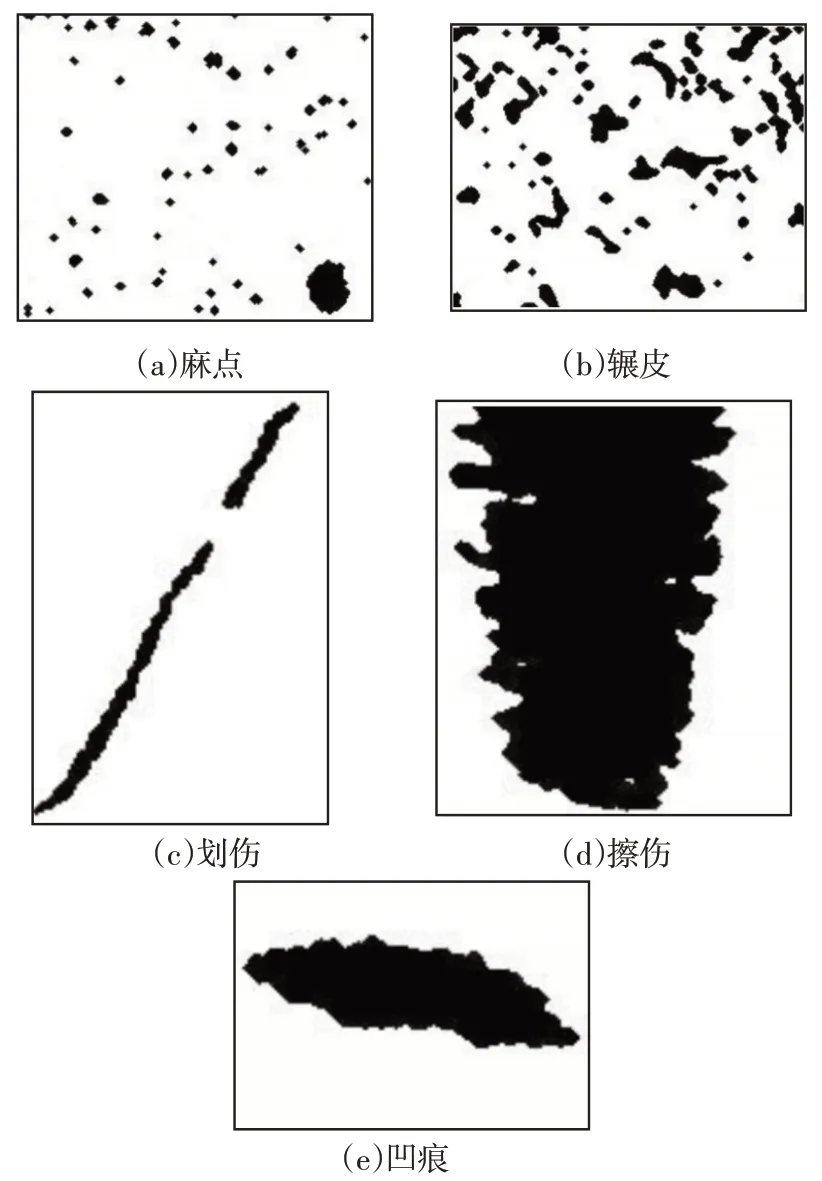
图5 形态学滤波后的二值图像Fig.5 Binary Image After Morphological Filtering
4 图像标记及特征提取
4.1 图像标记
在二值图像中提取连通区域时,通常的做法是给每个区域分配唯一代表该区域的编号,该区域内所有像素的像素值就赋值为该编号,这样的输出图像被称为标记图像[6]。
目前的二值图像连通区域标记算法大致可以分为三类:像素标记法、游程编码法和区域生长法。
这里采用8连通区域标记法,按照从左到右、从上到下的顺序依次扫描图像中的各像素点,找到灰度值为0的黑点并对其进行标记,判断其右边点、右下点、下边点是否为黑点,是黑点则进行同一编号标记,否则编号加1并继续进行扫描,直至扫描结束。
其原理就是把每个像素相互邻接的8 个像素中灰度值为0(黑点)的像素集合提取出来进行同一编号标记,这样便可以获得标记图像[7−8]。
4.2 特征提取
从标记后的缺陷图像中可以获得一些几何特征,根据这些特征对缺陷进行分类识别。针对轴承的五种主要缺陷,这里选择了连通区域数量、面积、平均面积、周长和长宽比作为缺陷特征的描述。
4.2.1 连通区域数量N
通过图像标记可以得到连通区域的数量,实验证明,五种缺陷的连通区域数量存在很大的差别。
4.2.2 面积A
面积是描述缺陷区域大小的几何量,通常用连通区域内像素点的个数来表示,其数学表达式如下式:
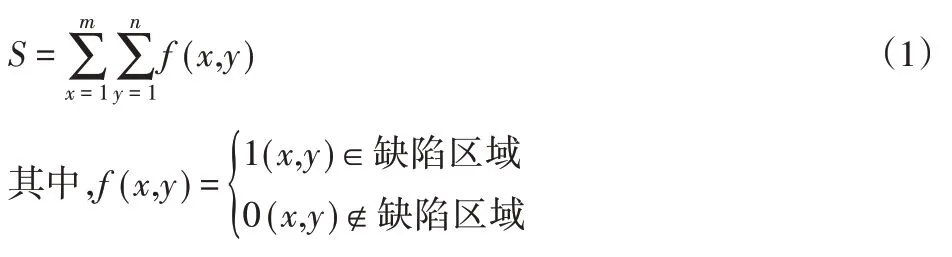
这里提出一种平均面积MA的概念,即图像中缺陷区域的面积A和连通区域数量N的比值,其数学表达式如下式:

4.2.3 周长P
特征区域的周长也就是区域边界的长度,其像素点有两种连接形式:并列或倾斜。当像素点并列连接时,像素间距为一个像素值;倾斜连接时为个像素值[9],数学表达式如下式:

式中:C—周长;No、Ne—并列或倾斜连接的数目。
4.2.4 长宽比R
对于一个任意方向的特征区域,和它的主轴、垂轴方向分别平行的矩形是唯一确定的,称为最小外接矩形(MER)[10]。
特征区域MER的长度和宽度之比称为长宽比,其数学表达式如下式:

式中:R—长宽比;L—MER的长度;W—MER的宽度。
对图5中的图像标记后进行特征提取,结果,如表4所示。
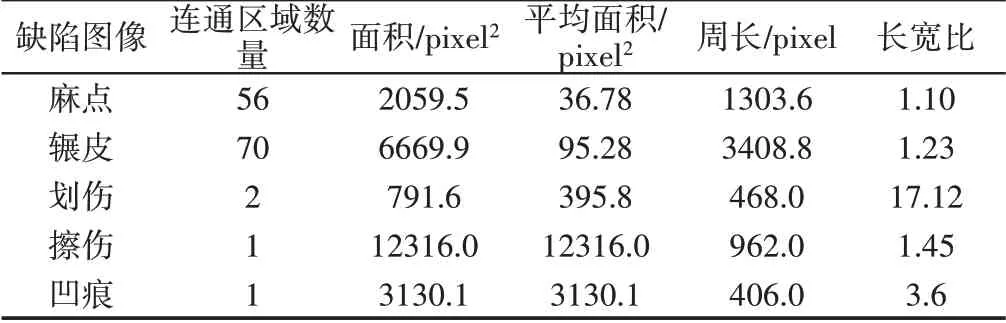
表4 缺陷图像特征检测数据Tab.4 Defect Image Feature Detection Data
5 分类识别及结论
5.1 分类识别
由上表4可以看出,各类缺陷图像的不同特征存在很大的差别,这里利用连通区域数量特征作为麻点、辗皮和其它三类缺陷的分类依据;利用平均面积特征作为麻点和辗皮的分类依据;利用长宽比特征作为划伤和擦伤、凹痕的分类依据;利用面积特征作为擦伤和凹痕的分类依据,形成了缺陷分类决策树,如图6所示。其中,N’、A’、MA’、R’分别为实验获得的边界值。

图6 缺陷分类决策树Fig.6 Defect Classification Decision Tree
利用该分类方法对获取到的300 张图片进行处理,统计结果,如表5 所示。可以看出,对轴承缺陷图像的识别率达到了97.3%,与BP神经网络、支持向量机等分类方法相比,这里方法更加简单实用、快速方便。
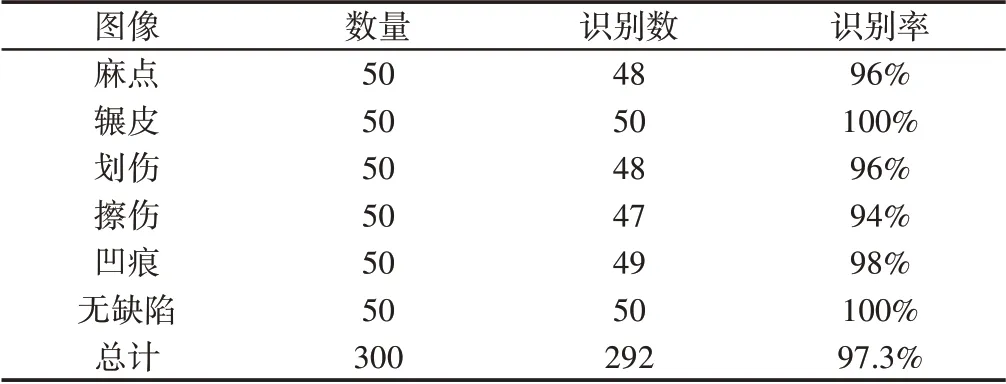
表5 统计结果Tab.5 Statistical Results
5.2 结论
针对列车滚子轴承表面缺陷检测问题,这里提出了一种基于机器视觉的检测方法,首先对图像获取装置进行了设计,提出了基于灰度标准差的初次分类方法,在二值化处理后对图像进行形态学滤波,然后对缺陷区域进行标记和特征提取,最后利用缺陷分类决策树完成缺陷类型的识别。实验表明,该方法实时性好、运算速度快,可有效检测出列车滚子轴承表面缺陷,而且可进行数据统计和管理,便于之后此类问题的研究。
