基于相干视频模拟法的机载脉冲多普勒雷达地杂波功率谱仿真分析
2022-04-28龚云
龚 云
(南京电子技术研究所,江苏 南京 210013)
0 引言
机载脉冲多普勒雷达的主要功能是探测飞行目标。雷达工作在下视状态时,雷达接收信号掺杂有强烈的地杂波信号,会大大影响雷达对目标信号的检测。为了发现远距离的低空飞行目标,必须采用高性能的信号处理技术对杂波进行抑制。要抑制杂波,就要对机载脉冲多普勒雷达地杂波功率谱及其空间分布情况有充分的了解。因此,研究机载脉冲多普勒雷达的地杂波功率谱具有十分重要的意义[1]。
直接计算法、等多普勒线积分法以及相干视频信号模拟法是计算机载雷达地杂波功率谱的常见方法。其中,直接计算法是根据理论表达式直接计算得到旁瓣杂波功率谱、主瓣杂波功率谱以及高度谱的值。该方法简洁但杂波谱细节表现不够且不形象。
等多普勒线积分法是将雷达波束照射到的地面按照等距离环等多普勒线划分成不同大小、不同形状的栅格,计算每个栅格的杂波回波。该方法需要进行大量的数值积分,且积分面积的形状复杂,积分运算计算量大,工程使用不便[3]。
相干视频信号模拟法是将雷达照射到的地面按照等距离环及不同的方位间隔划分成不同大小的栅格,利用雷达方程分别计算出每个栅格散射单元内的雷达回波信号,该信号具有幅度和相位信息[4]。由于脉冲多普勒雷达采用全相参体制,该方法利用了返回信号的相位信息,当存在运动目标信息时,对返回的信号作相参积累,利用地杂波与目标回波的多普勒差异,能够有效区分真实的目标信号,从而提高目标检测性能。
本文基于雷达方程,采用相干视频信号模拟法[6]对机载脉冲多普勒雷达地杂波回波信号进行模拟,给出地面反射杂波信号表达式,计算其功率谱。
1 地杂波的相干视频信号模拟法
采用等距离环等角度划分栅格的方法如图1所示,将雷达波束照射的地面区域划分成若干个ΔR×Δθ的栅格单元,其中ΔR和Δθ分别代表雷达的距离和角度分辨率。
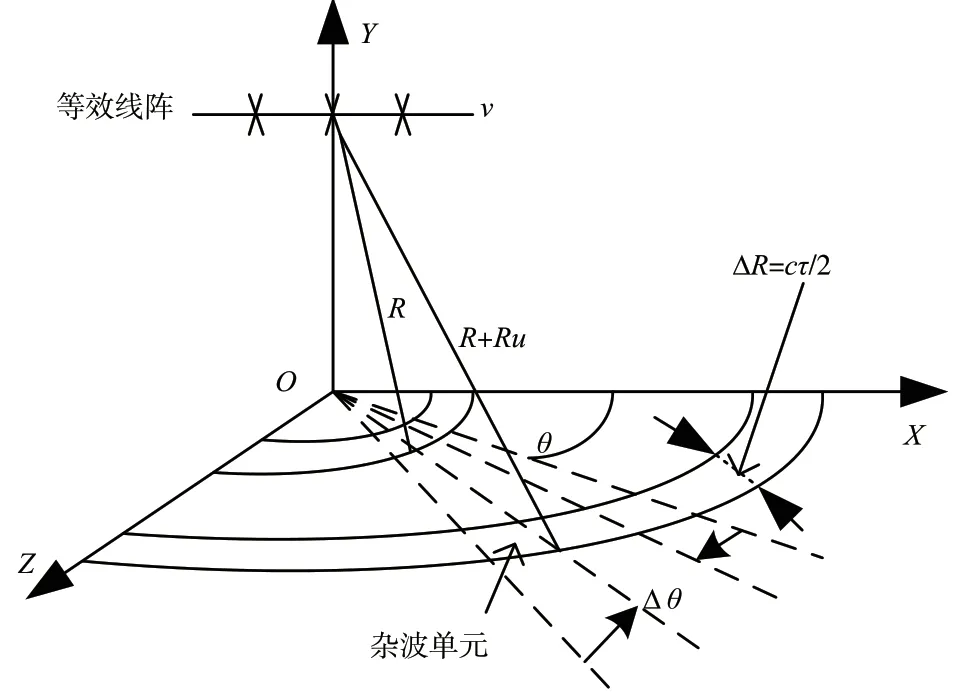
图1 地面栅格划分
1.1 距离分辨率ΔR
目前,雷达一般采用脉冲压缩技术提高分辨率。若雷达的采样频率为Fs,则在空间斜距上距离分辨单元为ΔR=c/(2Fs),而地距分辨率为ΔR/cosφ,φ代表擦地角。
1.2 方位角分辨率Δθ
在一定的距离环内,方位角变化量Δθ的选取准则是杂波源多普勒频率不可分辨。方位角变化量Δθ可表示为:
式中:fs为多普勒频率分辨率,M为积累脉冲数,PRF为脉冲重复频率,θ为方位角,φ为俯仰角。取角度变化量Δθ为最小(θ=π/2 时最小)值作为划分间隔,即:

一定距离环内所属的方位分辨单元总数为:

1.3 回波信号模型
雷达照射的地面杂波回波信号为所有栅格内散射单元回波信号的矢量和,而散射单元的方位角变化范围为全向360°,方位角每次按照Δθmin递增,任意散射单元的方位角可表示为:

任意栅格单元对应的杂波散射单元的雷达散射截面积(RCS)为:
式中:ΔAi为杂波散射单元面积,Ri为机载雷达与杂波散射单元的距离,σ0为栅格单元对应的地面后向散射系数。地面后向散射系数的模型如下:
式中:σod为漫反射系数,σos为镜面反射系数,β0为镜面反射区域角,βs为擦地角。βs通过式(9)计算:

距离Ri处散射单元的俯仰角为:

式中:H为载机高度,Re为地球半径(4/3 平均地球半径)。
依据机载脉冲多普勒雷达方程,对位于方位(θ,φ)处的杂波散射单元,其返回的第m个脉冲回波信号模型可表示为:
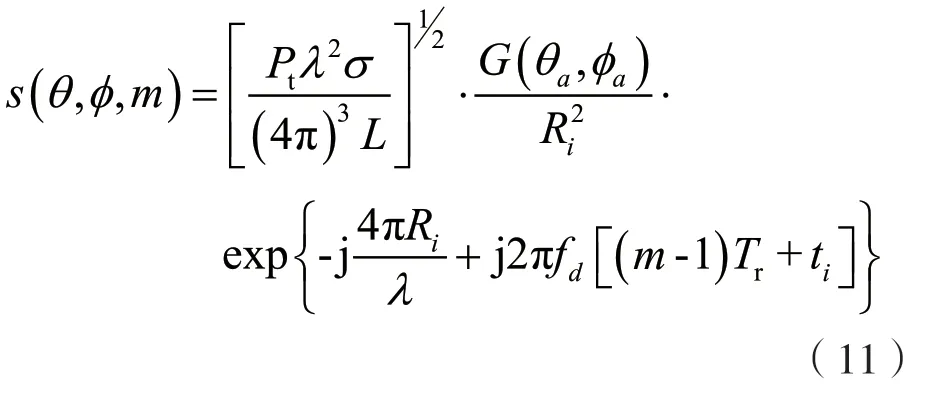
式中:Pt为发射机峰值功率,λ为雷达波长,σ为某个散射单元对应的雷达散射截面积,G(θa,φ a)为某角度下对应的天线增益,L为雷达系统损耗,Ri代表空间斜距,fd为该杂波散射单元对应的多普勒频率,Tr为慢时间采样即脉冲重复周期,ti代表快时间采样。
1.4 回波信号叠加
雷达发射周期脉冲信号,导致距离为R+iRu的这些距离环内的杂波信号会同时到达。Ru表示不模糊距离,不模糊距离及模糊次数分别表示为:
需要注意的是,回波信号叠加时,从各个模糊距离环返回的脉冲是不同的[6]。此过程可用图2说明。
如图2 所示,假设载机沿正Y轴水平飞行,雷达照射的最远距离为3 个模糊距离,对于图2(a)所示的距离门雷达接收到的各个模糊距离环的脉冲信号时域波形如图2(b)所示。对于3 个距离环,每隔一个脉冲重复周期都会有脉冲返回,只是各个距离环脉冲返回的起始时刻不同,如图2(b)所示。因此,当t=3Tr时刻,雷达第一次接收到从最远距离环A内的脉冲1#时,那么从与距离环A相距Ru的距离环B和与距离环A相距2Ru的距离C内接收到的则是脉冲2#和3#;当t=4Tr时,从距离环A、B、C内返回的脉冲分别是2#、3#和4#,后面的时刻依此类推。
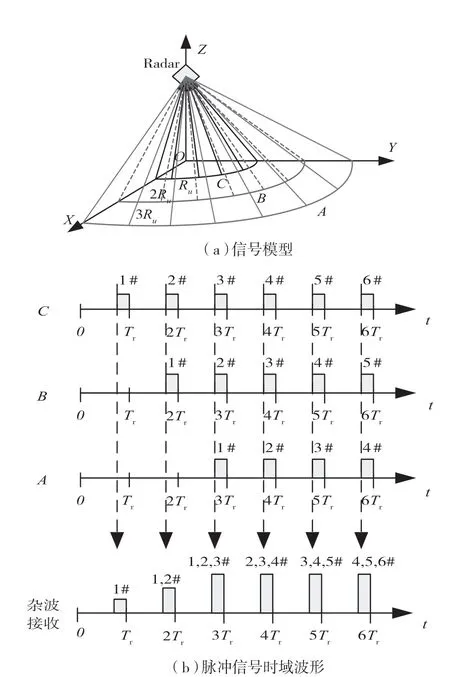
图2 模糊距离波门回波接收示意图
因此,用回波信号表达式(11)在方向维和模糊距离维进行二维信号叠加求和时,不同距离环Ri内式(11)中的m值是不同的。任意距离门R接收的信号可表示为:

式中:NRu为模糊距离数,Nθ为距离环单元数。
2 计算机仿真分析
下面给出用相干视频信号模拟法计算某组参数下地杂波功率谱的仿真图。假设32×32 矩形平面阵天线安放在飞机的正侧面,即正侧视安装,飞行参数如表1 所示。
当给定表1 的飞行参数时,距离-功率仿真结果如图3 所示。
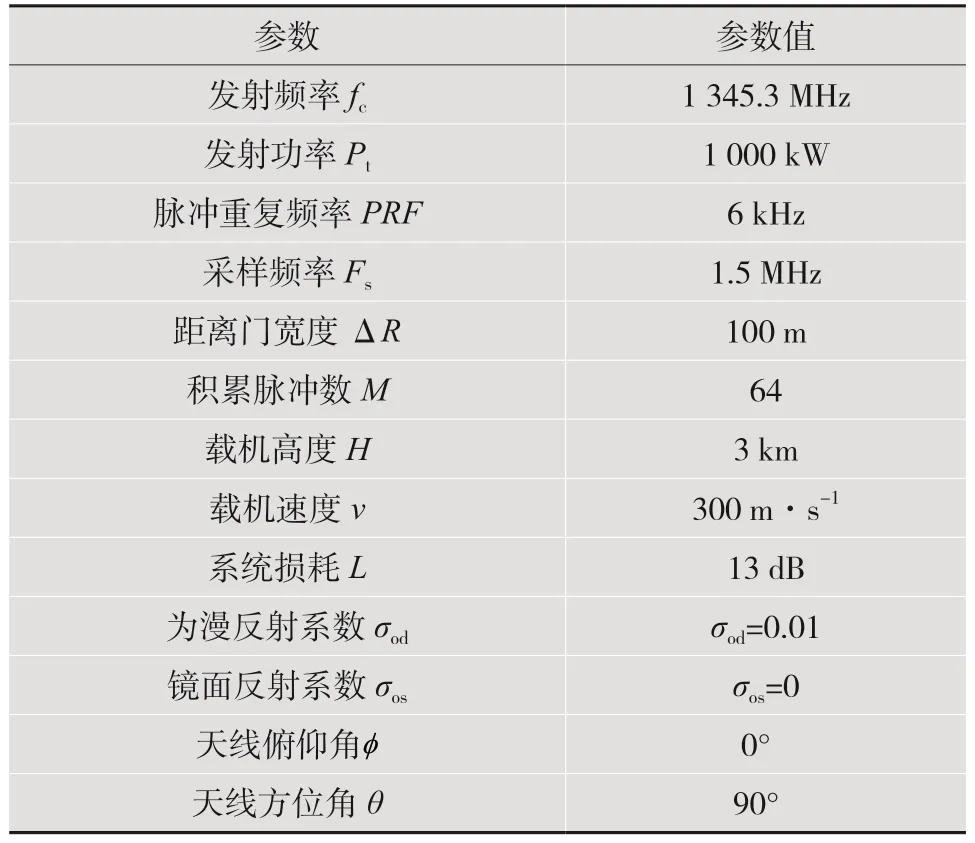
表1 飞行参数
该变天线方位角为θ=80°,天线俯仰角φ=0°,其他参数不变,距离-功率仿真结果如图4所示。
该变天线俯仰角为φ=20°,天线方位角θ=90°,其他参数不变,距离-功率仿真结果如图5所示。
由飞行参数可知,多普勒分辨率Δf=PRF/M=6 000/64=93.75 Hz。当天线方位角θ=90°时,功率谱主瓣中心频率是fMB=2vcosφcosθ/λ=0 Hz,图3(a)中主瓣位于33 号多普勒门即零多普勒频率门,图3(b)中主瓣多普勒频率为0 Hz,与理论计算相符。当天线方位角变为θ=80°时,功率谱主瓣中心频率变为fMB=2vcosφcosθ/λ=467.214 8 Hz,多普勒门偏移量为n=int(fMB/Δf)=int(467.214 8/93.75)=4,由图3(a)、图4(a)可知,主瓣中心频率由33 号多普勒门偏移到29 号,频移量为4,由图3(b)、4(b)可知,主瓣中心频率由0 Hz 变为467 Hz,符合理论计算值。
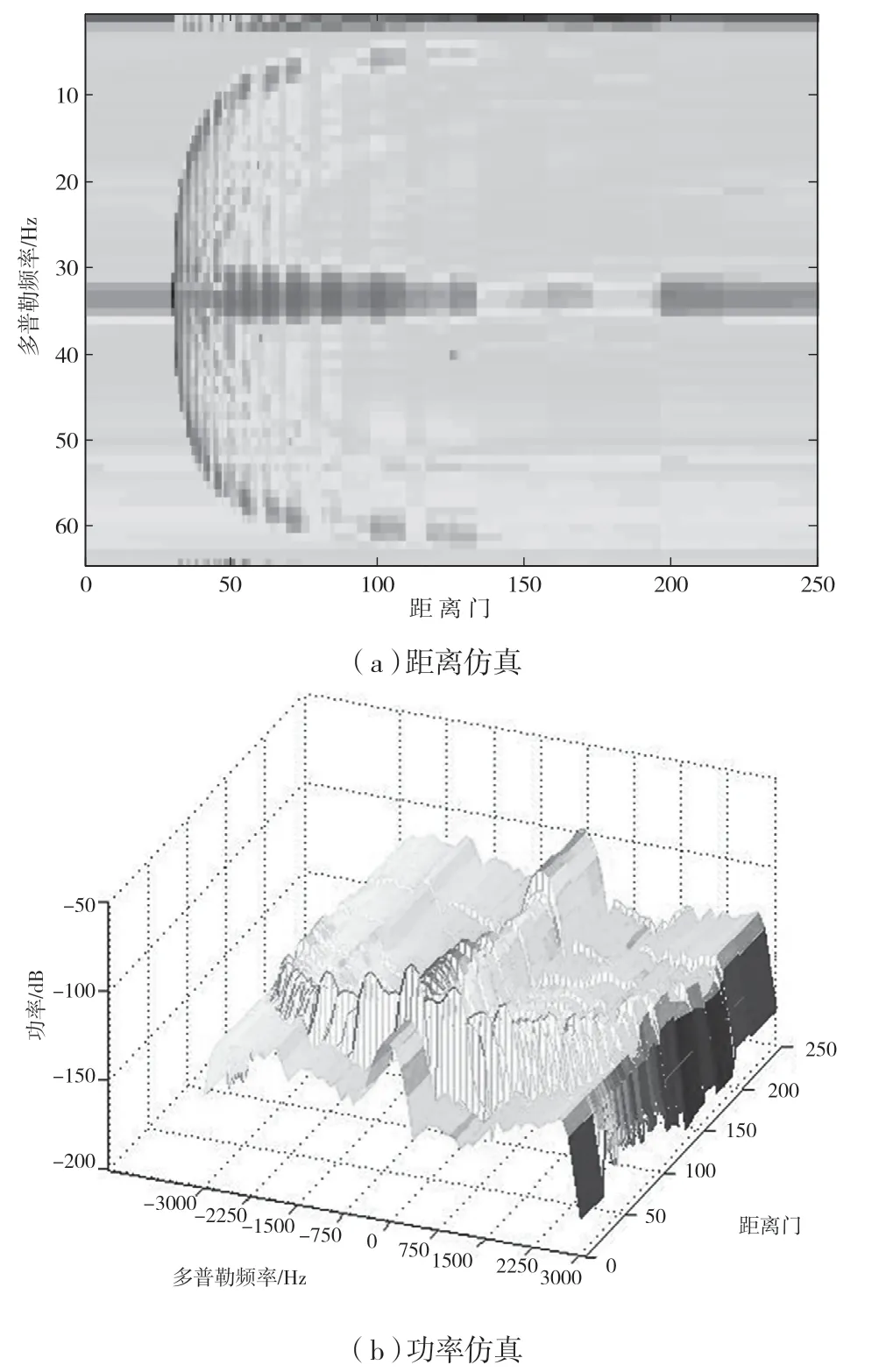
图3 参数按表1 设置的距离-功率仿真结果
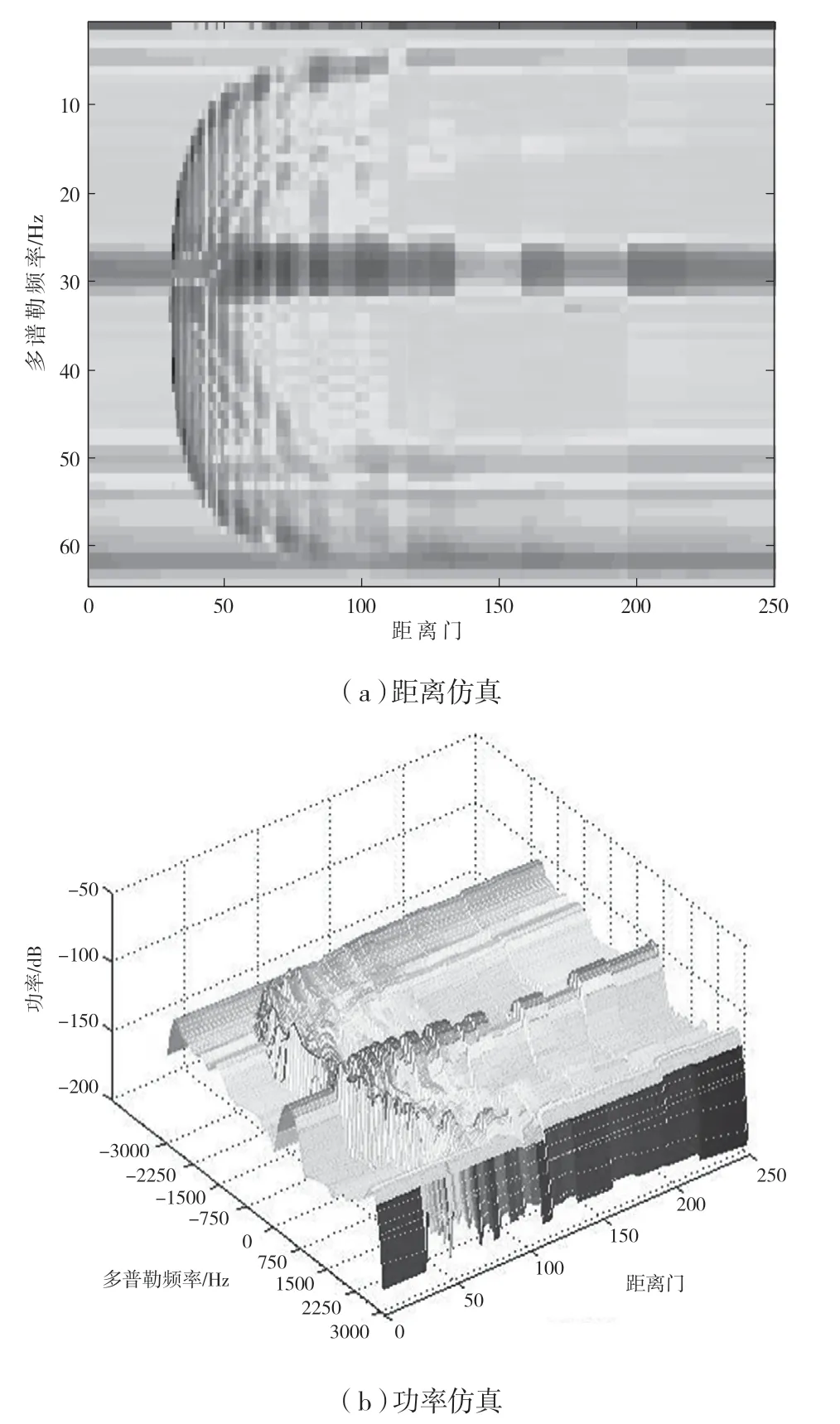
图4 θ=80°、φ=0°时的距离-功率仿真结果
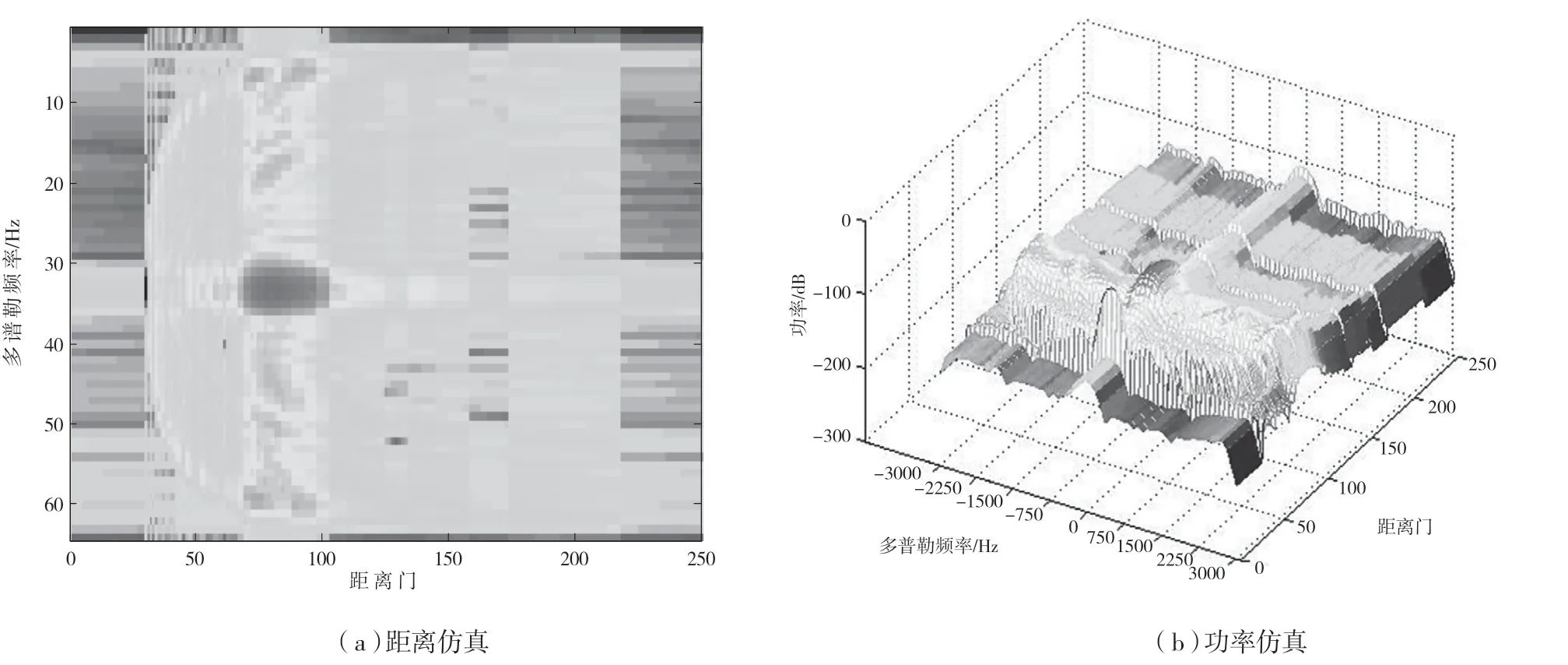
图5 θ=20°、φ=90°的距离-功率仿真结果
当天线方位角θ=90°时,不管俯仰角如何变化,功率谱主瓣中心多普勒频率恒定为fMB=2vcosφcosθ/λ=0 Hz,对比图3(a)和图5(a)可知,主瓣中心频率均位于33 号多普勒门(零多普勒门),图3(b)和图5(b)中主瓣中心频率都为0 Hz,符合理论计算值。
3 结语
本文研究了用相干视频信号模拟法计算机载脉冲多普勒雷达的地杂波回波信号的方法。用这种方法计算得到的回波信号既包含振幅又包含相位信息。根据接收到的回波信号进行傅里叶变换,可以得到地杂波回波信号的二维频谱。
