某型机主桨操纵系统地面联动故障分析与改进
2022-04-28史盼盼任津津
史盼盼 任津津
(1.中国直升机设计研究所,江西景德镇 333001;2.中国人民解放军61255部队,山西侯马 043000)
0.引言
飞行操纵系统是一个控制直升机飞行安全的关键系统[1],其主要的功能是将驾驶员的操纵指令递到直升机主、尾桨叶,实现直升机飞行姿态的控制。根据控制舵面的不同,直升机飞行操纵系统可以划分为主桨操纵系统和尾桨操纵系统。飞行操纵系统的发展经历了简单机械式操纵系统、液压助力操纵系统、电传操纵系统,再到光传操纵系统[2]。典型的液压助力操纵系统一般由驾驶员操纵装置、机械传动环节和机械液压伺服作动器组成。根据机械传动环节所使用的传输构件的不同,又分为硬式操纵线系和软式操纵线系[3]。
某型机主桨操纵系统为硬式液压助力操纵系统,主要由周期杆、总距杆、扭轴、支座、拉杆、摇臂、复合摇臂、助力器等部件组成。通过操纵驾驶杆和总距杆分别实现主桨的周期变距和总距变化。前后操纵驾驶杆可控制前助力器伸缩量实现纵向周期变距,左右操纵驾驶杆可控制左右助力器伸缩量实现横向周期变距,上下操纵总距杆可控制3台主助力器共同伸缩实现总距变化。3个通道的操纵在复合摇臂处综合,各通道间应各自独立,互不影响。
操纵系统功能的正常与否直接影响到飞行安全[4]。为确定飞行操纵系统工作状态,直升机飞行前通常进行地面供压试验,检查各通道操纵运动是否正常。某型直升机在进行地面供压试验时,发现存在主桨操纵系统地面联动故障,即当总距杆处于低距位置,前推驾驶杆时,总距杆有明显的上抬随动现象。此时如果用手阻止总距杆上抬,驾驶杆会有明显的卡阻现象,力感较大。该故障现象明显违反飞行操纵系统的设计要求,较大增加飞行员工作负荷和影响驾驶员操纵的准确度,可能导致重大事故发生,因此进行地面联动故障的分析和改进对于保证直升机飞行安全具有重大意义。
1.故障分析
1.1 复合摇臂工作原理
复合摇臂为总距操纵系统和周期变距操纵系统的共用部件,在复合摇臂处,总距操纵和纵、横向操纵进行耦合。图1中(1)为纵向摇臂;(2)为横向输入摇臂;(3)为横向输出摇臂;(4)为总距扭轴。当总距扭轴有输入时,使得纵、横向输出摇臂同时输出相同位移。当纵(或横)向有输入时,只使纵(或横)向输出摇臂有输出,而不影响总距线系。这就意味着:总距变化时不影响周期变距(自动倾斜器升高相同的高度,但倾斜角未变),当周期变距运动时也不影响总桨距(自动倾斜器倾斜,但仍然保持在相同高度上)。
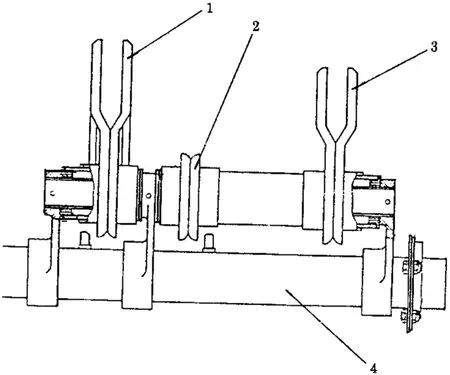
图1 复合摇臂
1.2 操纵联动传递原理
如图2所示,操纵系统正常工作情况下进行纵向操纵时,总距杆在总距前段操纵线系摩擦力的作用下保持固定,总距输入拉杆和总距输出摇臂保持静止,即总距扭轴无法绕a-a轴线转动。此时进行纵向操纵,纵向输入拉杆带动纵向摇臂绕轴线b-b转动,纵向输出拉杆运动,总距输出摇臂静止,只有纵向输出不会产生联动。
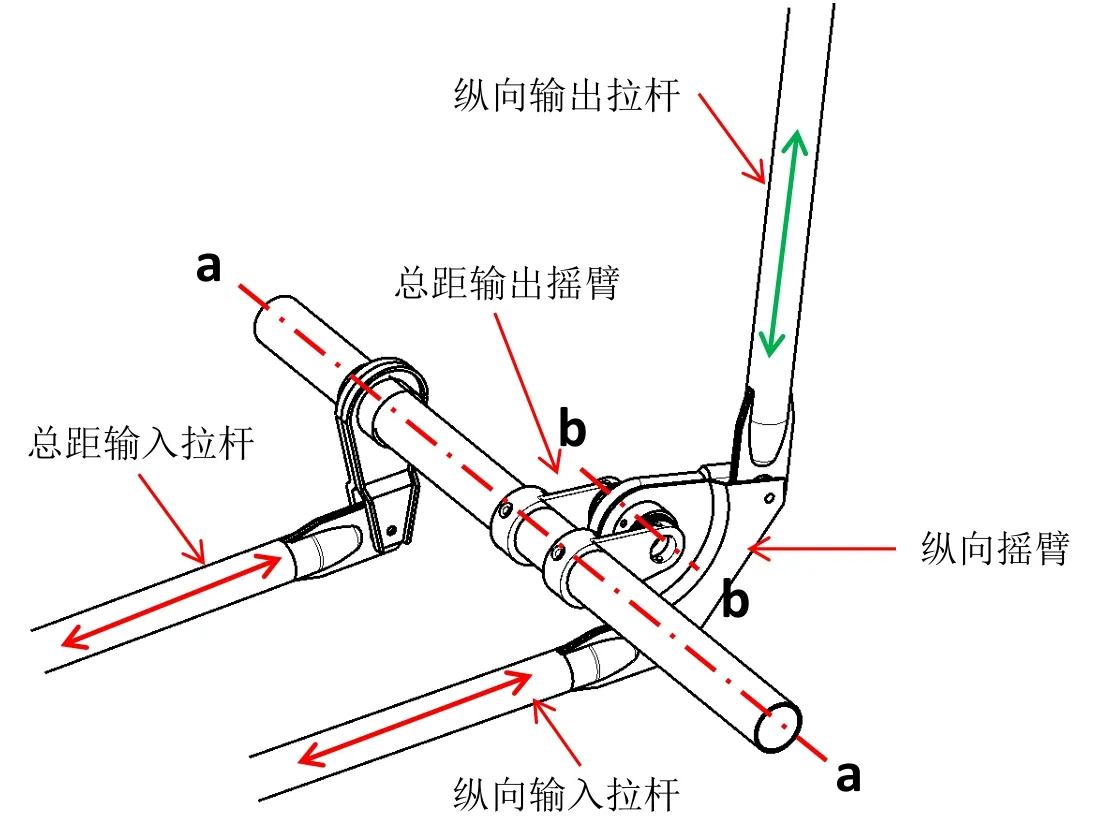
图2 运动分析
当纵向摇臂所受的阻力较大时,纵向操纵时纵向摇臂无法绕轴线b-b自由转动,则纵向操纵运动会向操纵力较小的总距扭轴传递,即驾驶杆纵向操纵引起总距杆联动,表现为总杆随驾驶杆上抬,或下压。同样当纵向摇臂所受的阻力较大时进行总距操纵也引起纵向输入拉杆运动,导致驾驶杆纵向运动,即总距杆操纵引起驾驶杆纵向操纵联动。
1.3 联动受力分析
取总距扭轴和纵向摇臂做为整体进行受力分析。总距扭轴上作用有轴承的支座反力Fx和Fy,总距扭轴转动所需的力矩M总距(主要为总距摩擦力)。纵向摇臂上作用有纵向输入拉杆给摇臂的作用力F纵和摇臂之后操纵线系给摇臂的作用力F后。
如图3所示,正常纵向操纵时,力矩M总距能够使得总距摇臂保持固定。前推驾驶杆,纵向操纵线系所传递的力F纵推动纵向摇臂绕轴心b转动。
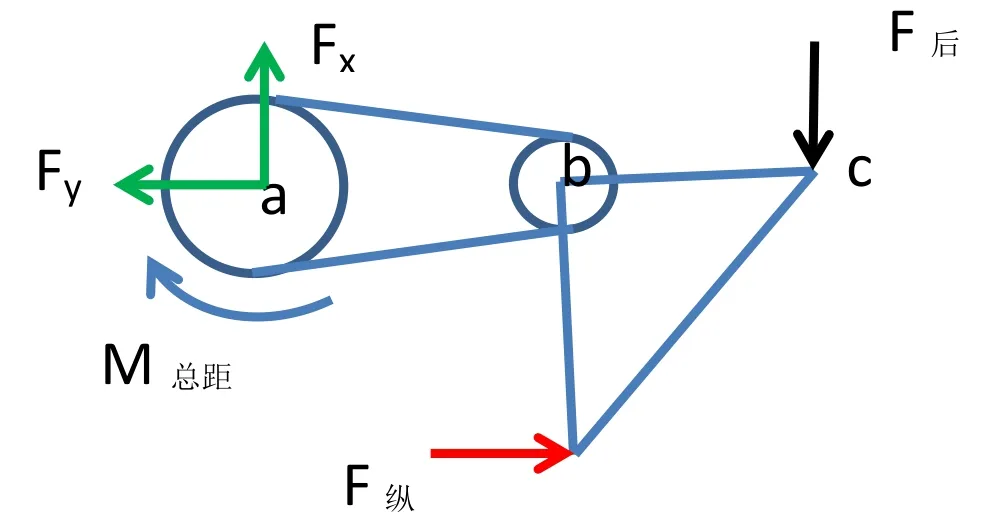
图3 正常状态受力分析
当纵向摇臂后段阻力F后较大时,前推驾驶杆的操纵运动会向力臂较大的总距扭轴传递,即在F纵的作用下纵向摇臂会在绕b运动的同时绕a点平动,从而带动总距扭轴转动,该转动最终通过总距线系反传至总距杆,如图4所示。
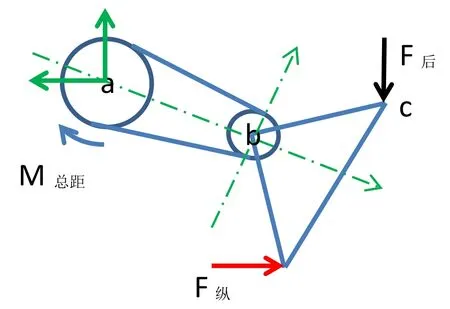
图4 联动状态受力分析
判断是否产生总距杆与驾驶杆联动现象的核心要素在于纵向摇臂所受的阻力F后的大小。当阻力F后较小时,驾驶杆纵向操纵和总距杆操纵互不影响,属于正常状态。当阻力F后较大时,驾驶杆全部操纵力大部分都反传至总距杆,总距杆操纵力很大,此时的联动为故障状态。
2.故障定位
经上述分析证明纵向摇臂后的阻力过大导致地面联动,为定位故障部位,利用故障树分析法进行具体定位。经分析可导致故障的原因有:复合摇臂故障、助力器滑阀卡滞、液压系统故障、助力器过载。据此建立故障树(见图5),通过故障树分析,初步确定地面联动涉及7个底事件。
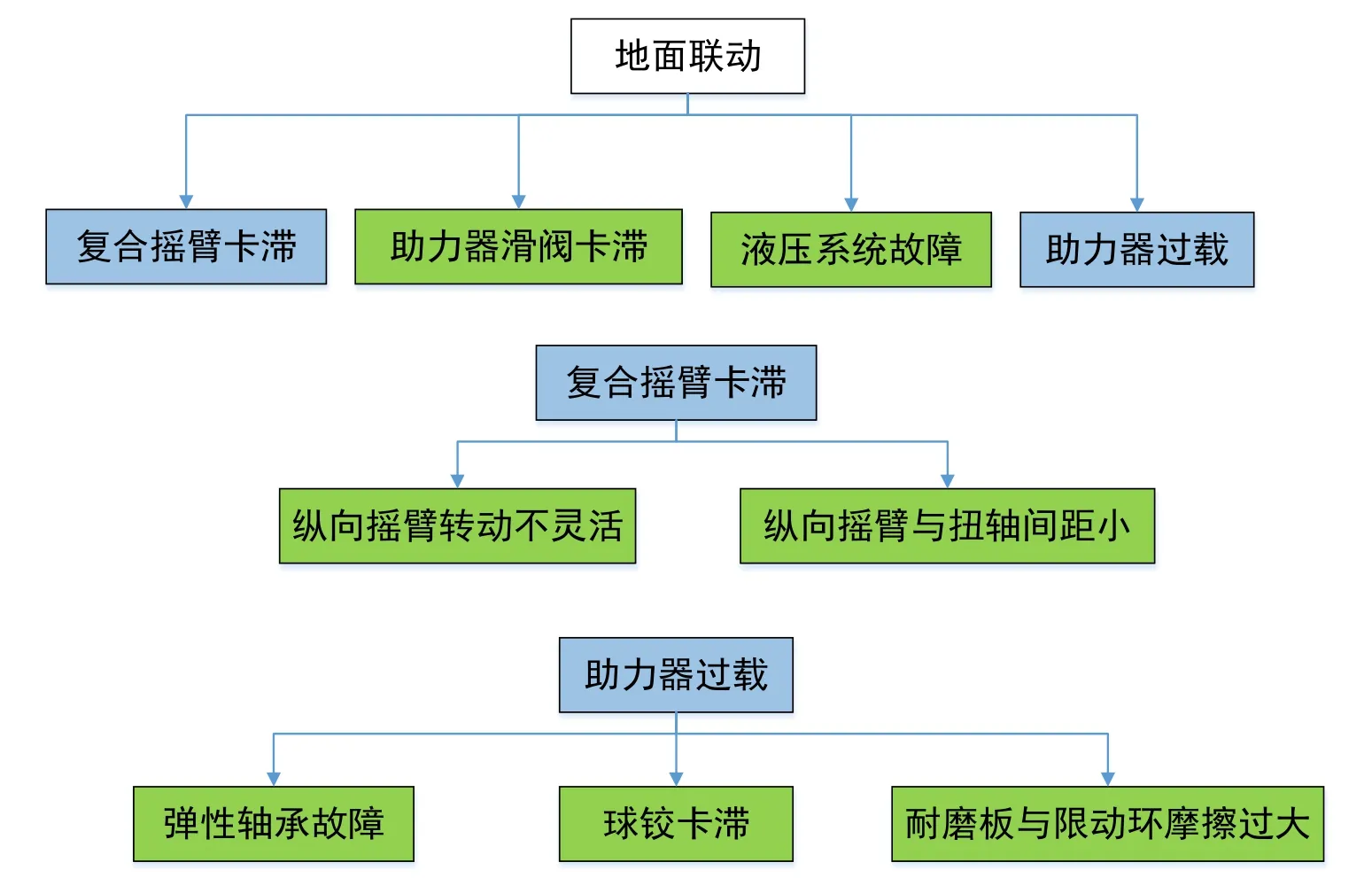
图5 地面联动故障树
根据故障树对7个底事件进行了排查:地面上开展操纵线系灵活性检查,复合摇臂各摇臂转动灵活,地面上复合摇臂与纵向摇臂间隙测量均满足要求。对于纵向助力器,经返厂检查油滤处无明显污染物,纵向助力器滑阀操纵力满足技术要求。经返厂检测和换件检查确定液压系统工作正常,通过液压系统的压力调节阀可调节助力器的供给压力,经返厂检测,均满足设计的压力要求。对自动倾斜器进行不离位检查,自动倾斜器各关节,间隙满足要求,运动灵活。
根据旋翼系统组成,助力器载荷主要来自于弹性轴承扭转力、限动环与耐磨板摩擦力、自动倾斜器重力和摩擦力。为进一步分析旋翼系统载荷与联动现象的相关性,分别针对全线系连接状态(含操纵系统杆系、助力器、自动倾斜器、桨毂及桨叶)、模拟空中状态(抬起主桨叶使主桨叶支臂与限动块脱离接触)、断开变距拉杆(助力器仅驱动自动倾斜器)3种状态进行测试,测量结果如表1所示。

表1 助力器载荷及联动现象测试结果
通过上述试验结果可知,弹性轴承和耐磨板处对于助力器载荷贡献较大。通过对弹性轴承和自动倾斜器进行检查,发现弹性轴承外观正常且刚度符合设计要求,同时自动倾斜器的大球铰运动灵活且间隙正常。之后在限动环处涂抹润滑脂,减小耐磨板与限动环之间的摩擦力,再次全线系连接状态下进行地面供压试验,操纵系统地面联动现象基本消失。
3.结论
地面驾驶杆与总距杆联动故障源于纵向摇臂后阻力较大,具体原因可定位为:地面停机状态下,主桨叶耐磨板与限动环之间摩擦力大,使得助力器负载超出了助力器最大输出力,导致驾驶杆的操纵运动无法通过复合摇臂上的纵向摇臂向线系后段传递。此时,纵向摇臂带动复合摇臂总距扭轴转动,总距扭轴运动向前反传至总距杆,产生地面联动现象。
地面停机状态下开展全线系的地面操纵检查可通过在主桨叶防磨片和下限动环之间涂抹润滑脂,减轻主桨叶防磨片和下限动环之间的摩擦力,从而降低作用在助力器上的载荷,缓解地面联动现象。
