基于显模型跟踪控制系统的直升机姿态边界保护设计
2022-04-28刘少兵
刘少兵
(中国直升机设计研究所,江西景德镇 333000)
直升机机动飞行中的姿态边界保护,目的是让飞行员在机动中将其主要的注意力从监视、判断姿态边界中解放出来,从而降低操纵负荷,提高驾驶品质,更便于飞行器发挥出其潜在的机动性能[1]。目前飞行边界保护主要实现途径主要是基于传感器数据通过反馈控制实现飞行边界的限制。这种方法在固定翼飞机的空速、迎角、过载系数等飞行包线边界限制方面已经得到广泛应用[2-4]。在旋翼飞行器领域,V-22“鱼鹰”采用该方法实现了旋翼轴扭矩、旋翼转速的限制保护[5]。但是这种方法存在的潜在问题,主要包括:反馈控制具有滞后性,实现不了边界“硬限制”,且容易形成操纵死区,影响飞行边界附近的飞行品质。
本文通过对显模型跟踪控制系统中的指令模型进行边界映射和修正,从而实现对姿态边界的保护。
1.直升机动力学模型
直升机数学模型使用9阶线性状态空间模型,状态方程包含9个状态量,4个输入量,具体如下:
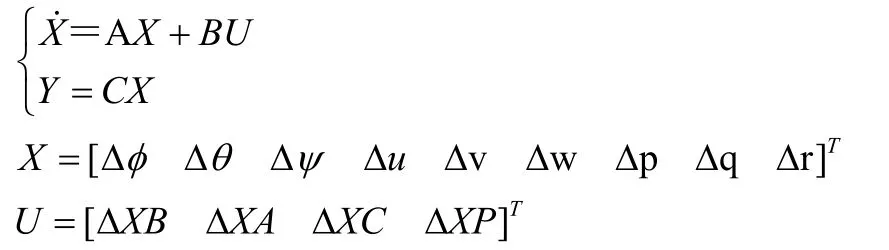
式中,φ、θ、ψ分别为为欧拉角表示的滚转角、俯仰角、偏航角,u、v、w分别为机体坐标系下的前向速度、侧向速度、法向速度,p、q、r分别为机体坐标系下的滚转角速度、俯仰角速度、偏航角速度,XB、XA、XC、XP分别为纵向周期变距、横向周期变距、总距桨距、尾桨距的操纵输入。
为完成姿态边界保护主动控制系统设计和验证,本文选取某直升机中等重量、正常重心、平原空速Vi=160km/h飞行状态点的状态空间模型。
2.控制结构
显模型跟踪控制结构[6]已在AH-64D,UH-60M、CH-53K等多种先进直升机中应用[7-9],其基本结构如图1所示。

图1 显模型跟踪控制律基本结构
该控制系统由指令模型、逆模型、反馈补偿模块及控制对象构成,每个模块实现的功能及其设计独立。指令模型生成驾驶员期望目标指令,逆模型消除对象特性,反馈补偿模块补偿逆模型的误差。对应不同的控制要求只需要改变与之相应模块的参数就行。
显模型是跟踪控制系统中的被跟踪模型,也就是系统要实现的理想设计目标,体现了飞行员对直升机操纵动力学特性的要求。理想模型一方面可以与飞行品质规范的带宽、姿态快捷性和大幅姿态变化等指标建立对应关系,满足操纵品质的要求,另一方面可以与部分飞行包线参数建立映射关系。

控制系统的输出量Y(s)近似等价于指令模块的输出量,即显模型输出,而与直升机对象的实际特性无关,从而能够实现对指令信号的跟踪。
3.显模型跟踪控制系统设计
直升机固有操纵响应是速率响应类型,即指令输入对应角速度,这种控制方式在不良目视环境下会给飞行员带来较大的操纵负荷和风险。为了克服这一问题,飞行品质规范ADS-33E[10]提出了在不良目视环境下要求满足更高等级的响应类型。当目视条件降级为UCE=2时,响应类型应为姿态响应/姿态保持,即ACAH响应类型。
采用显模型跟踪结构可以满足ACAH响应类型的要求。
3.1 AC指令模型设计
对于俯仰和滚转轴,使用ACAH响应类型,指令模型为一个标准的二阶环节[11]。以横滚为例,操纵输入δlat到横滚姿态角指令φcom的传递函数为为横滚姿态指令灵敏系数,ξ为阻尼系数,ωn为模型带宽。
显模型带宽的选择直接关系到显模型跟踪性能的好坏。带宽过小存在驾驶员诱发振荡的风险,而直升机本身带宽较小,如果显模型带宽过大,将使直升机响应速度难以追上显模型输出状态的变化。依据ADS-33E对小幅度操纵输入的短周期响应的要求,直升机的横向通道带宽一般设计为3rad/s~5rad/s。
利用飞行品质规范对直升机性能的要求来确定灵敏系数。某直升机机动性要求为中等敏捷,前飞时,依据ADS-33E,等级1要求AC响应类型能达到最小滚转角为25°,假设操纵输入δlat的范围为[-100%,100%],则KAC≥0.25°/%。为保留一定操纵裕度,取KAC= 0.3°/%。为了达到良好的控制效果,二阶线性显模型的阻尼系数取ζ=0.7。
3.2 逆模型设计
逆模型构成对被控对象的前向补偿能够提高直升机对指令的响应速度。对直升机刚体运动的传递函数进行拟合获得的低阶等价模型足以满足显模型跟踪控制设计对逆模型的要求。采用一阶传递函数进行各通道低阶等价模型的拟合。
拟合频段的选取应覆盖显模型设计带宽。由于所设计的滚转通道显模型带宽为3rad/s~5rad/s,因此逆模型主要考虑的是研究对象在1rad/s~10rad/s低频段之间的准确度。
采用直升机状态方程纵、横分离后,某直升机横向通道操纵输入δlat到横滚角速率p的传递函数为:,使用Matlab的freqs和invfreqs命令进行低频段频域拟合[12],得到一阶传递函数为。
滚转通道低阶等价模型拟合结果如图2所示,拟合程度较好。对低阶拟合模型求逆,近似得到lon= 4.95pcom+1 1.93spcom= 4.95pcom+ 1.93p˙com。由此完成逆模型前馈补偿控制设计。

图2 滚转通道低阶等价模型拟合结果(Vi=160km/h)
3.3 反馈补偿模块设计
由于对逆模型的简化处理只考虑了该低频段范围的准确度,因此逆模型在高频段的准确度不够,高频控制性能不足,需要反馈补偿模块来补偿逆模型的误差。使用传统的PID控制实现反馈补偿,其中角速率反馈采用比例控制,姿态反馈采用比例加积分控制,采用根轨迹等传统方法即可完成相关参数设计,非本文重点,此处不再赘述[13]。
4.姿态边界保护主动控制系统设计
直升机姿态状态量包括姿态角和姿态角速率,是直升机最基本的飞行包线,超出边界限制将可能引发任务载荷失效、结构损伤甚至坠毁等危险。基于显模型跟踪控制律的结构特点,建立显模型与被保护量之间的数学关系,对理想指令模型进行修正来实现边界保护。姿态角加速度是姿态角速度的快变量,姿态角速度是姿态角的快变量,通过建立快变量与慢变量之间的映射,对快变量进行修正来达到限制慢变量的目的[14-15]。
4.1 动态限幅饱和积分控制器
设计快变量到慢变量的动态限幅饱和积分控制器,如图3所示。
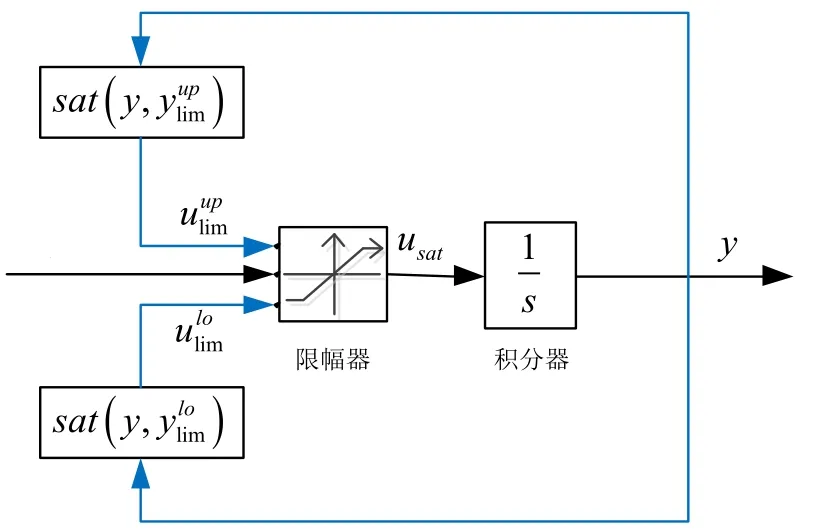
图3 动态限幅饱和积分控制器
没有限幅器时,输入u经过积分器得到输出y,u是y的快变量。加入限幅器后,限幅器限幅值根据输出与边界设定值的差动态调整,如下公式所示:

设置输入斜率为3的斜坡函数,设定输出边界为±20,ksat取值-1和-2,动态限幅饱和积分控制器的仿真效果如图4所示。从仿真结果可以看出,动态限幅饱和积分控制器通过动态调整慢变量的输入限幅,可以有效地将输出限定在设置的边界内,通过调整ksat可以改变受约束慢变量的动特性。

图4 动态限幅饱和积分控制器仿真
4.2 控制系统设计
在实现姿态边界保护时,不需要对逆模型和反馈补偿模块进行修改,只需要通过在2.1节设计的AC指令模型中增加动态限幅饱和积分控制器,即可实现对姿态角速率和姿态角的限制,如图5所示。

图5 姿态边界映射AC指令模型
基于显模型跟踪的直升机姿态边界保护主动控制是一种“硬限制”,在紧急或某些故障状态,需要瞬时突破飞行包线限制,飞行员需要解除保护功能。通过在AC指令模型中分别加入姿态角速率保护开关SW1和姿态角保护开关SW2,飞行员可以根据使用需求投入或关闭边界保护功能。
5.姿态边界保护仿真验证
以某直升机为例,为了限制机动过程中的过载,保障直升机结构安全,假定要求转弯时不允许超过20°倾斜角以及15°/s的倾斜角速率,对本文设计的基于显模型跟踪的直升机姿态边界保护主动控制系统进行仿真验证,根据模型跟踪效果取ksat=−1,仿真结果如图6所示。

图6 仿真曲线
仿真结果分析见表1。通过仿真可以看出,在没有加入倾斜通道指令模型修正的情形下,倾斜角速率和倾斜角会超过给定的限制。而在对倾斜通道的指令模型进行修改后,投入相应包括控制开关,倾斜角速率或倾斜角指令得到了限制,并未超出给定的边界。基于模型跟踪控制的边界保护主动控制方法是有效的,能够很好的实现状态边界保护的控制目标。

表1 仿真结果分析
6.结语
本文通过分析直升机力学模型设计了直升机显模型跟踪控制系统,分别完成AC指令模型、逆模型和反馈补偿模块的设计。基于姿态边界保护的任务需求,在不修改其他模块的前提下,在AC指令模型中设计并融入动态限幅饱和积分控制器进行试验仿真,对比了有无边界保护的控制效果。结果表明,基于模型跟踪控制的边界保护主动控制方法是有效的,能够很好地实现飞行边界限制保护的控制目的,而且限制值和投入时机完全定制。本文研究的方法同时可以应用于速度、过载等边界的主动保护,具有良好应用前景。
