基于LiDAR数据的水域边界提取方法探讨
2022-04-27王金龙王爱华周军元
戴 腾,王金龙,周 锋,王爱华,周军元
(1.湖北省测绘工程院,湖北 武汉 430074;2.武汉大学出版社,湖北 武汉 430072;3.山东省国土测绘院,山东 济南 250000)
基于LiDAR[1]点云数据的地物边界提取一直是众多学者关注的焦点之一。赵小阳[2-4]等结合机载和船载LiDAR点云数据,探讨了自动化识别地物、智能化提取地物边界、三维重建等方面内容;邵磊[5-7]等基于LiDAR点云数据开展了利用格网模式提取河流水涯线、水体轮廓线、水体边界点的方法研究;廖中平[8]等提出了一种可调节滚动圆半径的α-shapes平面点云边界提取算法来快速提取完整点云边界;黄帅[9]等公开了一种基于机载LiDAR点云数据缺失区域边界提取方法来获得细节完整,且相互独立的机载LiDAR点云数据缺失区域边界。湖北省因水资源丰富而著称,全省大江大河、湖泊、沟壑水网星罗棋布,水体面积及边界形状各异,对水体边界提取提出了新的挑战。鉴于此,本文提出一种适合于湖北水网特点的边界提取算法,在湖北省测绘工程院项目生产中得到了较好的应用。
1 研究区与数据
研究区地处沿湖北省内长江流域和汉江流域的条形地带,地形类别基本属于丘陵。2017-01~2017-05,原国家测绘地理信息局与原湖北省测绘地理信息局组织实施了研究区内LiDAR点云数据的获取。该点云数据的点间距为1.3~1.4 km2间,高程系统为大地高,高程精度约为0.2 m。整个研究区DEM生产面积大于40 000 km2。考虑到计算机的运算能力和处理效率,将研究区的Li⁃DAR点云数据按1:10 000图幅进行分块并命名。
LiDAR点云数据的预处理流程包括:
1)根据研究区获取的LiDAR点云数据,结合湖北省似大地水准面精化模型成果,将高程系统转换为1985国家高程基准的正常高,其计算公式:

2)点云的坐标换带。根据航摄分区分布位置,用TerraSolid软件,按3°分带对数据进行投影换带。
3)数据分幅。进行分块分幅处理,便于在统一标准下多人同时进行编辑操作。
4)噪声点滤除。将明显低于地面的点或者点群(低点)和明显高于地表目标的点或者点群(空中点),以及移动地物点定义为噪声点,在进行地面点分类之前,先去除这类噪声点。
5)提取地面点。裸露地表处有且只有一次回波,此次回波对应的反射点即为地面点;植被覆盖区域可能对应多次回波,最后一次回波对应的反射点即为地面点。
6)人工编辑点云分类。对点云参照正射影像进行精细分类,包括对高程突变的区域调整参数和算法重新进行小面积的精细分类,采取人工编辑模式对分类错误的点进行重分类,精细区分地面点与非地面点,并分类保存。
7)DEM制作。对确定表达地面真实形态的地面点云作为特征点,结合带有高程信息的精确匹配的特征线,采用构建TIN方式,可以直接获得研究区的DEM产品。
2 水域边界提取方法
在机载LiDAR数据中,水体所在区域的点云具有点云稀疏、回波强度弱、高程相近等系列特征,生产高精度DEM时,难以达到水域内DEM的置平或自然平缓过渡等技术要求,因而需要大量的人工编辑处理,自动化水平较低,无法满足生产工作的需要。为此,提出一种自动提取LiDAR点云数据水域边界的方法,该算法的流程图如图1所示。
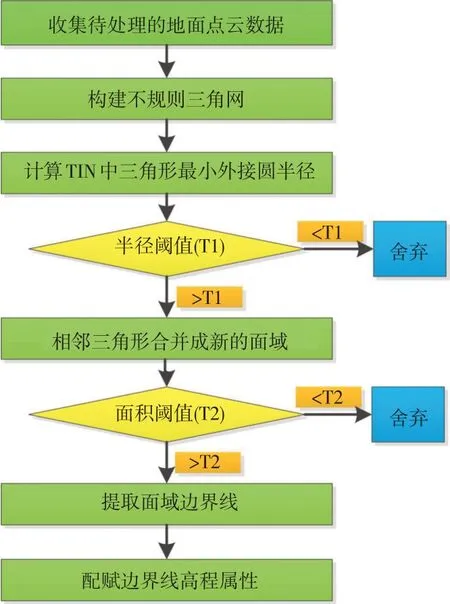
图1 流程图
算法具体执行路线:
1)在LiDAR点云数据的处理环节第6步——人工编辑点云分类后,即可得到精细编辑区分后的地面数据,如图2中蓝色点状数据。
2)以地面点云数据为基础,自动构建测区不规则三角网(TIN)。图3为图2水面区域LiDAR点云TIN的局部放大图。
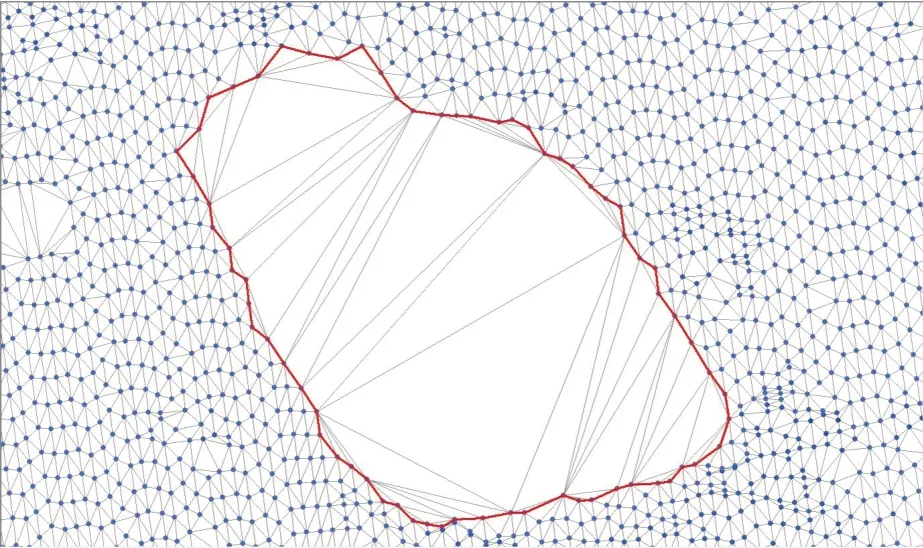
图2 水域边界提取结果
3)计算TIN中每个三角形的最小外接圆的半径,图3中三角形中H1-H10、K1-K10均为三角形编号样例。
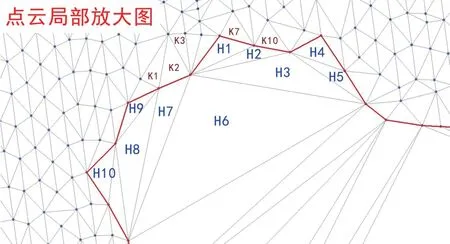
图3 点云局部放大图
4)根据待处理区域LiDAR点云数据的地面平均距离,确定一个阈值(T1,一般等于点云间距的1.5倍左右)。
5)将每个三角形的最小外接圆半径值与阈值T1进行比较,记录下比阈值T1大的三角形。
6)在上述记录三角形中,将相邻三角形进行融合合并(如图3中三角形H1~H10),形成多个新的面域。
7)在项目设计书中,规定了最小置平处理的水域面积。根据项目设计书要求,选择合适的水面区域面积为面积阈值(T2),选取融合合并后的面域面积大于T2的区域,自动提取其边界线(图2中红色线条)。根据边界线上每个节点的高程值,选取其中的最小高程值,直接作为该边界线的高程值,这确保了水面区域的高程值的绝对水平。
利用自动提取的水域边界线作为特征线,配合边界线区域外围的三角网来生产测区数字高程模型产品,可以保障水面区域数字高程模型精度与平滑过渡的技术要求,实现了水域与其周边区域的数字高程模型一体化生产(以上过程利用Python语言开发实现)。
3 结果分析
3.1 提取结果
对整个研究区的水域边界进行提取,提取过程中,阈值T1(三角形最小外接圆半径)设置为2 m,阈值T2(合并后面域的面积)设置为200 m2。使用5台高性能工作站集中运行,运行速度约为幅/20 min。
图4为研究区内的一个1:10 000图幅,其中红色边界为提取的结果,图中水域形状为长条形、方形、弧形、锯齿形等,水面宽窄不一,长短不同。图4左下区域蓝色水域边界的局部放大图为图5所示。里面存在2个空洞区域,图6为其他实验图幅的空洞区域。
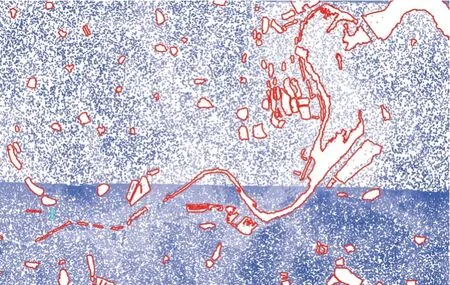
图4 实验区边界提取结果
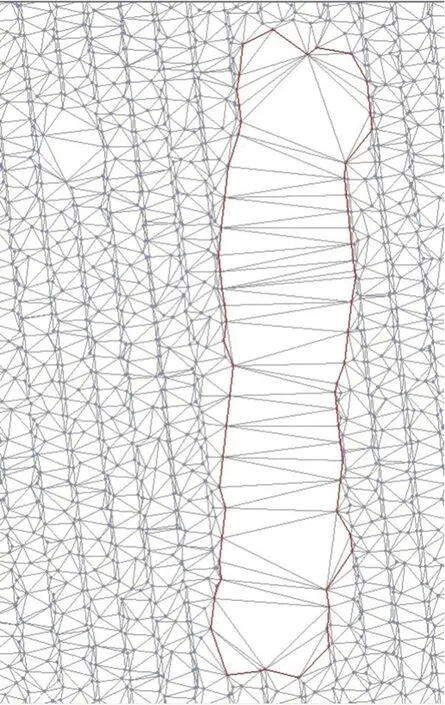
图5 局部提取细长形水域边界
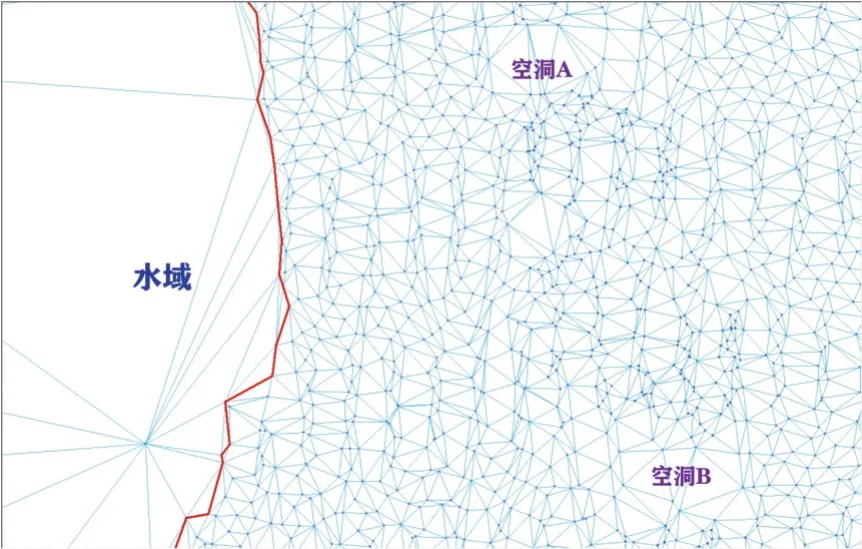
图6 空洞区域
3.2 结果分析
1)根据图4可以看出,图中提取的水域形状呈多种样式,表明本方法能完全适应多种形状的水面区域。
2)根据图5、6可以看出,本方法能正确舍弃小空洞区域(图5左上角、图6空洞A和空洞B),使DEM数据更加符合实际地表情况,提高了产品质量。
3)相对于传统的单幅图手工勾画水面区域,或直接生成DEM产品后再人工编辑水面边缘DEM数据的作业手段,该生产方式大幅减少了人工编辑的工作量,提升了生产效率,缩短了生产周期。
4 结语
为适应测绘科技创新及装备建设的高要求,湖北省测绘工程院积极围绕数据快速生产、提升生产服务支撑能力全方位谋划,主动思维。基于此,本文提出一种基于单个三角形最小外接圆来提取水域边界的方法,包括构建TIN、计算三角形最小外接圆半径、三角形面域合并、提取面域边界等步骤。该方法只需根据LiDAR点云间距,设置合适的阈值即可进行,适用于任意形状的水域边界提取。当然,自动识别提取水域边界的方法有很多种,如何避开水边界处茂密植被等均是将后研究的方向,还应结合水域面与桥梁、涵洞相交处高程突变的特点,继续完善其功能,努力实现全省基础时空信息数据的高质量快速更新,提升湖北实景三维在自然资源管理中的应用效率,为快速实现实景三维中国而服务。
