一致性算法下光储直流微网改进下垂控制
2022-04-26郑济林
郑济林 ,王 军 ,孙 章 ,吴 帆
(1.西华大学电气与电子信息学院,成都 610039;2.西华大学流体及动力机械教育部重点实验室,成都 610039)
目前,电网中光伏PV(photovoltaic)发电等可再生新能源逐渐增加的渗透率促进了微电网技术的发展。相比于交流微电网,直流微电网由于不存在相位同步、无功功率损耗、谐波电流和变换器损耗等问题,逐渐受到人们越来越多的关注[1-2]。直流微电网中分布式发电DG(distributed generation)单元的控制模式一般可分为集中式控制、分散式控制和分布式控制。在分散式控制中,下垂控制由于在低通信需求下即可实现发电单元输出功率均分,满足系统中各单元分布式接入的需求,近年来在直流微电网控制中得到广泛研究和应用[3-4]。
然而,传统下垂控制由于引入了虚拟电阻,使得在母线电压稳定和实现功率均分上存在相互冲突的矛盾。此外,各单元变换器到直流母线之间的线路电阻的随机性也会影响功率均分的精度。为了解决以上问题,人们在传统下垂控制的基础上开展了大量改进工作。首先,通过增加集中式二次控制策略,来克服下垂控制的固有缺陷。文献[5]采用一种集中式的二次补偿控制,其中央控制器在接收母线电压偏差后将控制信号发送到所有DG单元,但该二次控制存在容易遭受单点故障和无法即插即用的问题。文献[6]对下垂系数进行研究,根据相应系统中负荷容量的实际大小来进一步调整下垂系数,但始终无法较好地收缩母线电压的偏离范围。文献[7]提出通过微电网通信层的全局通信获得各个DG单元的输出电流,计算平均电流并将其与实际电流作差,然后将偏差送入PI控制器来获得各单元的控制信号进而实现高精度的功率均分和母线电压恢复,这种利用全局通信的控制方法可以克服对中央控制器的依赖,但是对通信的要求依然较高。
近年来,人们提出了基于一致性的分布式控制策略,仅需要本地的状态信息和邻居单元的状态信息即可使系统的控制变量趋于一致,不存在单点故障的问题,具有较好的灵活性、可拓展性和鲁棒性。已有一些文献就基于一致性算法的下垂控制二次补偿策略在微电网中的应用进行了相应研究。文献[8]提出了一种基于离散一致性算法的改进自适应下垂控制策略,控制节点与邻居节点交换电压信息后通过本地的一致性算法估测全局平均电压,并动态计算满足均流和调压要求的目标虚拟电阻。文献[9]提出一种基于对等稀疏网络的离散一致性算法控制策略,仅通过与邻居单元进行有限通信就可实现直流微电网各单元之间功率均分和母线电压的稳定。文献[10]提出了一个基于改进一致性算法的电流状态观测器,并根据主电源输出电流差值来产生1个母线电压参考值的修正量,以此来恢复直流母线电压。
上述分布式一致性控制策略均可以在低通信需求下实现对下垂控制的二次控制,使得直流微电网达到功率均分和恢复母线电压。但是在实际应用中,当系统运行在稳定状态时,由于通信带宽有限,邻居单元之间的通信次数应尽量少,同时减少控制器更新频率也可以延长其使用寿命。
综合考虑以上问题,本文提出一种基于一致性算法的孤岛型直流微网改进下垂控制策略,在第1层的本地控制中,采用传统的下垂控制方法以满足微网中分布式单元之间基本的功率均分需求;第2层控制采用事件触发的分布式平均一致性算法来改进传统下垂控制的固有缺陷。单元之间只需在满足事件触发机制时与邻居单元通信,即可完成二次电压恢复和功率均分控制,保证控制性能的同时有效减少了通信次数,降低了对通信的需求。同时,PV单元可根据储能ES(energy storage)单元情况自动切换运行模式,保证直流微网功率平衡。
1 直流微电网系统构成及图论
1.1 直流微电网结构
图1为典型的独立光储直流微电网系统结构。根据微网内电源性质的不同可分为PV单元和ES单元,各个单元通过变换器接入公共直流母线,利用通信层的低宽带通信网络进行通信,控制各自的输出电压、电流和荷电状态SOC(state of charge),实现系统内部的电压稳定和功率平衡。

图1 典型光储直流微电网结构Fig.1 Structure of typical PV ES DC microgrid
1.2 代数图论
图论作为一门应用十分广泛且极其有用的数学分支,在物理、生物、经济、信息论、计算机等多个领域都可以找到应用场景,其可将对实际问题的分析抽象成对图的分析,简化实际问题的复杂度。因此,在直流微电网中可以用无向图G≜(V,E)来表示分布式单元之间的通讯连接拓扑,其中V={1,2,…,N}为有限非空节点集,N为无向图G中总的节点数目,E⊆V×V为图的边集。
在直流微电网的通讯拓扑中,将每个分布式单元都看作是图G的1个节点,单元之间的通讯连接作为图G的边,用1个N×N的矩阵A=A(G)=(aij)来表示图G的邻接矩阵。若分布式单元i与j之间存在通讯连接,则说明图G中节点i与j之间存在边,令邻接矩阵A中对应的元素aij为1,否则为0,即

若aij为1,则称节点i和节点j互为邻居。由于本文不考虑通信权重系数对一致性的影响,仅考虑两节点之间是否存在通讯,因此当(i,j)∈E时,取aij=1。用D=dig(d1,d2,…,dN)表示图G的度矩阵,其中di为节点i的度,表示其邻居节点的数量。无向图G的Laplace矩阵是1个双随机矩阵,用L=D-A=(lij)表示,其中lij可表示为
矩阵L是对称半正定矩阵,且L的每行元素之和为0,因此L有1个特征值为0,对应的特征向量为1=(1,1,…,1)T,即L1=0。若图G是连通图,其Laplace矩阵则刚好有1个特征值为0,并且此时其余特征值可按从小到大递增顺序排列,即0=λ1(L)<λ2(L)≤ …≤λN(L),其中λi(L)为矩阵L的第i个特征值,i=1,2,…N,而第2个特征值λ2(L)又称为图G的代数连通度[11]。
2 基于一致性算法的二次控制
2003年Saber等[12]提出了一致性控制理论,这种连续时间下的一致性算法可表示为

只要通信网络的拓扑图G是连通的,那么式(3)在t→∞时,各节点状态就能达到一致,即满足。本文的通讯网络拓扑如图2所示。

图2 通讯拓扑Fig.2 Communication topology
2.1 PV单元的分布式控制策略
为了维持直流微电网内部的功率平衡,本文中PV单元可在最大功率点追踪MPPT(maximum power point tracking)模式和下垂控制模式之间进行切换。当PV单元在MPPT模式下运行时,系统可最大程度利用可再生能源,然而若PV单元的总出力大于负荷的需求功率时,ES单元处于充电状态。为了避免系统独立运行时出现能量不平衡,威胁直流母线电压的稳定,当ES单元的SOC达到允许上限时,将ES单元断开运行,并将PV单元切换为下垂控制模式。

PV单元分层控制结构如图3所示。

图3 PV单元分层控制结构Fig.3 Hierarchical control structure of PV unit
2.2 ES单元的分布式控制策略
每个ES单元的SOC是衡量其充放电程度的关键指标,其计算公式为

式中:SOCi为ES单元i的实时荷电状态;ib,i为ES单元电流;Sb,i为ES单元的容量。
对ES单元的控制要求是在充放电过程中尽量保持各ES单元的SOC一致,避免单个ES单元过充或者过放,影响其使用寿命。此外,为了恢复由于线路电阻导致的母线电压跌落,还需要恢复母线电压。与PV单元控制策略一样,通过获得SOC修正量和电压修正量来实现。
式中:PES,i为ES单元i的输出功率;SOCH、SOCL分别为ES单元i放电时的荷电状态上限、下限。
ES单元在本地计算得到状态变量ξi后,与其他ES单元进行通讯获得状态变量误差,再将误差εi经过PI控制器调节得到SOC修正量。
当ES单元的状态变量ξi在一致性控制下趋于一致时,即可实现不同ES单元的SOC逐渐向一致的方向收敛靠拢。放电时,SOC越大的ES单元放电越快,SOC下降越快,SOC越小的ES单元放电越慢,SOC下降越慢,反之亦然。
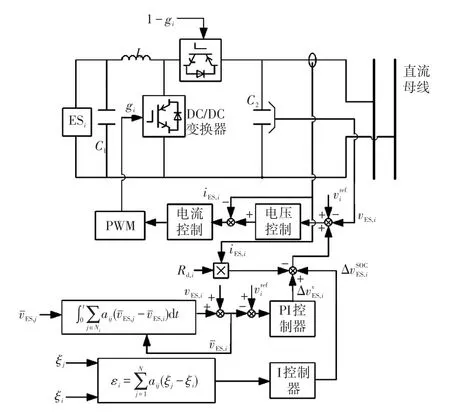
图4 ES单元分层控制结构Fig.4 Hierarchical control structure of ES unit
PV单元和ES单元通过上述分布式二次控制策略改进之后,可在满足各单元功率分配的同时,恢复由于线路电阻和虚拟电阻引起的母线电压跌落,并且避免单个ES单元过充过放影响使用寿命。
3 事件触发机制下的一致性控制
本文控制方案中,控制任务都是周期性执行。当没有外部干扰且系统按预期状态处于平稳运行时,控制器如果还是周期性地执行控制任务,从某种意义上来说是对控制资源和通信资源的一种浪费[14]。而在一致性算法理论的研究中,也有研究人员对各节点的状态趋于一致后,邻居节点仍持续保持通信而造成通信资源浪费的问题进行了研究,并就此问题在结合了事件触发控制后提出了事件触发机制下的一致性控制理论。但是,目前对于事件触发机制下一致性控制的研究大多数还停留在理论阶段,没有结合具体的应用来探讨其在实际中的作用和性能。文献[15]提出了一种基于事件触发机制的直流微电网多混合ES系统分层协调控制方法,来实现低通信次数下系统内部蓄电池和超级电容之间的功率协调分配,但其事件触发函数是对加入电压偏差补偿项和功率分配补偿项之后的母线参考电压进行推导得来,使得影响触发条件的参数较多,导致触发机制较为繁琐复杂。而本文中分布式事件触发预估状态反馈一致性控制器,使得只有二次控制层平均一致性算法平均状态的获取处于事件触发机制中,触发函数仅使用本地单元此时刻状态和上一触发时刻状态。在该控制器作用下,各单元之间不需要连续通信,只需在现有的基础上,周期地进行事件触发检测,即可实现控制任务,并且从根本上避免发生Zeno现象[16-17](即在有限时间内发生无数次事件触发的现象)。
将与前述的基于一致性算法的二次控制相结合的事件触发控制的实现流程如图5所示。
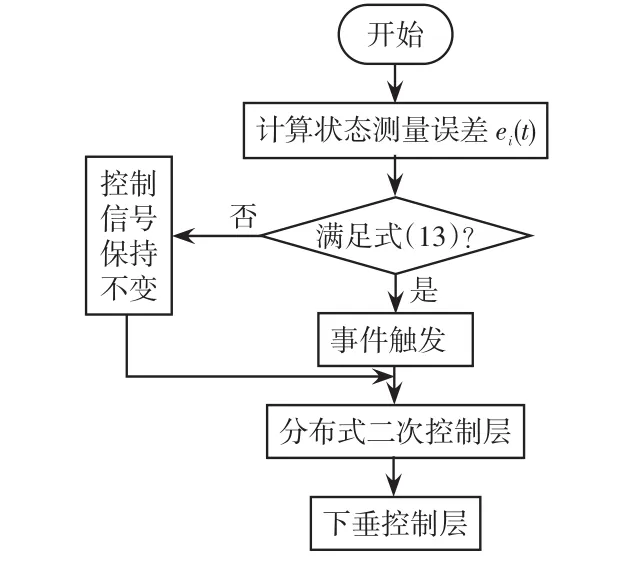
图5 事件触发控制流程Fig.5 Flow chart of event-trigger control
4 仿真算例分析
为了验证以上控制策略的可行性,在Matlab/Simulink中搭建了含有4个PV单元、4个ES单元和3个负载的独立光储直流微电网模型,如图1所示。系统及控制器参数如表1所示。其中,RPV,i为第i个PV单元输出端到直流母线之间的线路电阻,RES,i为第i个ES单元输出端到直流母线之间的线路电阻,LPV为PV单元变流电路电感,LES为ES单元变流电路电感,CPV1和CPV2分别为PV单元变流电路前后电容,CES1和CES2分别为ES单元变流电路前后电容。

表1 直流微电网及控制器参数Tab.1 Parameters of DC microgrid and controller
表1中物理参数是通过参考现实系统设定,但为了使仿真结果显示更加清晰明显,适当增大了线路电阻的参数值;PI控制器和I控制器的比例积分系数是通过仿真实验调试得到。
4.1 仿真算例1
在算例1中,设定此时ES单元由于充电达到SOC上限,已经断开运行退出系统,为了维持母线电压的稳定,PV单元处于下垂控制模式。初始负载为12 kW,t=1.0 s时切除初始负载的25%,t=2.0 s时增加初始负载的25%,分别采用本文所提控制策略和传统下垂控制策略的PV单元输出电流的仿真结果如图6所示。

图6 两种控制策略下PV单元输出电流Fig.6 Output current from PV unit under two control strategies
在图6(a)中,t=0~1 s之间稳定状态下PV单元的输出电流分别为7.40 A、7.35 A、7.32 A和7.31 A,t=1~2 s之间稳定状态下PV单元的输出电流分别为5.56 A、5.57 A、5.52A和5.51 A。在图6(b)中,t=0~1 s之间稳定状态下PV单元的输出电流分别为8.10 A、7.38 A 6.76 A和6.52 A,t=1~2 s之间稳定状态下PV单元的输出电流分别为6.10 A、5.58 A、5.12 A和4.92 A。从图6(b)可以发现,在传统下垂控制中虽然引入了下垂系数来减小功率均分误差,但为避免下垂系数过大而产生较大的母线电压跌落,引入的下垂系数较小,导致线路电阻不匹配对功率均分效果产生了较大影响。图6(a)中,通过本文所提控制策略在二次控制层计算得到功率均分误差修正量,动态调节各PV单元输出功率,从而及时消除了不同线路电阻对功率均分的影响。
对比图6(a)和图6(b)可发现,与传统下垂控制比较而言,本文所提控制策略可将由于线路电阻不匹配导致的功率均分误差极大地减小,实现各个PV单元之间的输出功率均分,并且在遭遇负载波动变化后仍可以在短时间内恢复功率均分效果。
采用本文所提控制策略和传统下垂控制策略的直流母线电压比较如图7所示。在图7中,t=0~1 s之间稳定状态下两种控制策略的直流母线电压分别为391.7 V和368.0 V,t=1~2 s之间稳定状态下直流母线电压分别为394.5 V和372.2 V。对比图7中电压波形曲线可发现,与传统下垂控制比较而言,本文控制策略可通过二次控制层生成电压偏差修正量,动态调节直流母线电压,将由于线路电阻和下垂系数导致跌落的直流母线电压恢复到母线初始设定电压的±5%以内,并且在遭遇负载波动的情况下也不会超出最大允许偏差范围。

图7 两种控制策略下的直流母线电压Fig.7 DC bus voltage under two control strategies
图8为事件触发分布式一致性控制策略下各个PV单元之间的通信触发时刻。图8(a)中,在t=0.9~1.0 s之间系统已经趋于稳定,PV单元之间几乎不进行通信,保持上次的触发值即可满足系统控制要求;当t=1.0 s时,由于负载发生变化,PV单元之间的通信又开始进行,在系统逐渐达到稳定后通信频率慢慢降低。图8(b)中,在t=2 s之前由于系统处于稳定状态,通信频率很低;当t=2.0 s时负载发生变化导致系统状态变动,PV单元之间再次增大通信频率以实现二次控制的控制要求。
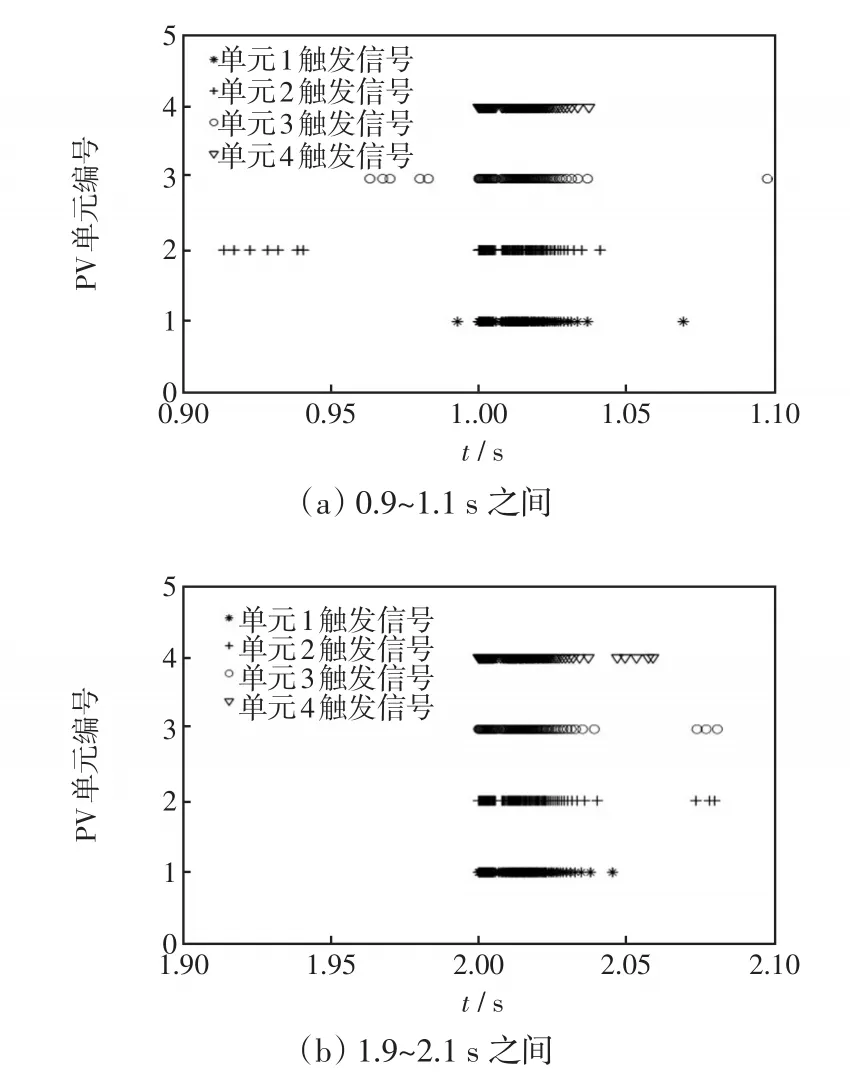
图8 PV单元通信触发时刻Fig.8 PV units at communication trigger time
4.2 仿真算例2
在算例2中,设定此时PV单元和ES单元在系统中共同运行,PV单元处于MPPT模式,ES单元处于下垂控制模式来稳定直流母线电压。PV单元输出总功率为16 kW,初始负载9 kW,t=2 s时初始负载增加1/3。由于PV单元输出总功率超过负载需求的总功率,此时ES单元处于充电模式,初始SOC分别为38%、35%、32%和28%。需要说明的是,为了在短时间内体现明显的充放电效果,对蓄电池的容量进行了适当处理。分别采用本文所提控制策略和传统下垂控制策略的各个ES单元SOC如图9所示。
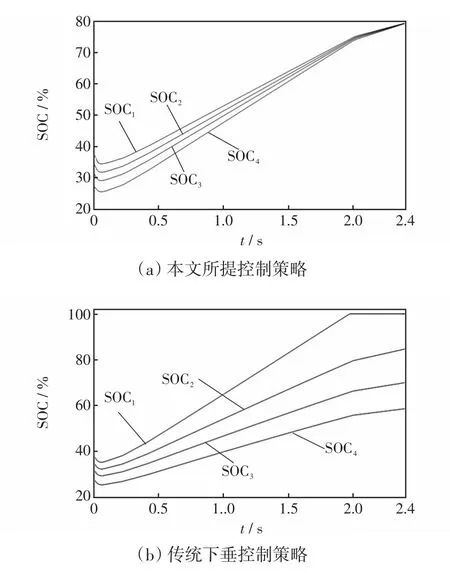
图9 两种控制策略下的ES单元SOCFig.9 SOC of ES unit under two control strategies
图9中,初始阶段由于PV单元的输出功率还未稳定达到最大功率,此时ES单元短暂地处于放电模式,随后在PV单元达到最大输出功率后,ES单元开始充电。对比图9(a)和图9(b)可发现,传统下垂控制策略下SOC由于线路电阻的不同,导致各ES单元输出功率也不相同,使得部分ES单元过早达到充电上限而退出运行;而在二次补偿控制下可以控制各个ES单元的功率分配,使得SOC趋于一致,避免个别ES单元发生过充现象,提高ES单元的利用效率。
采用上述事件触发分布式一致性控制策略和传统下垂控制策略的直流母线电压如图10所示。
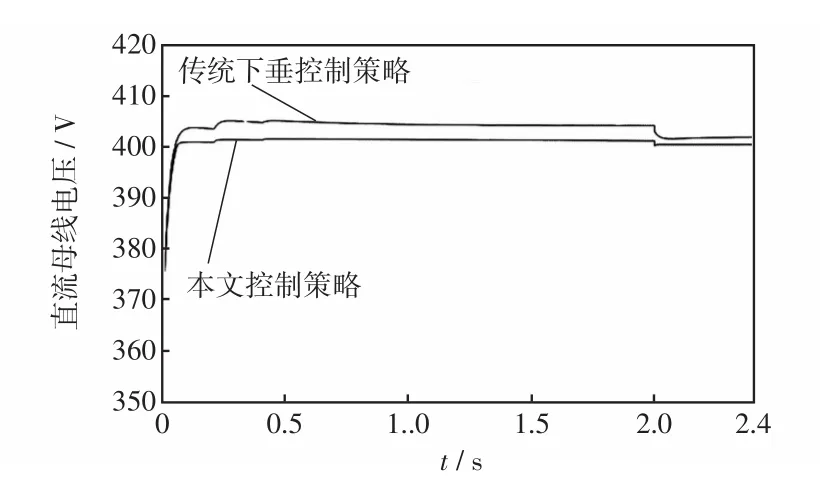
图10 两种控制策略下的直流母线电压Fig.10 DC bus voltage under two control strategies
对比图10中电压波形可发现,由于选择的下垂系数满足约束条件,即避免母线电压跌落过大选择较小的下垂系数,因此两种控制策略下的直流母线电压均在母线电压最大允许偏差范围之内。其中,在t=0~2 s之间稳态运行下本文所提控制策略下的直流母线电压为401.5 V,而传统下垂控制策略下的直流母线电压为404.4 V;t=2.0 s时负载发生变化,在遭遇系统波动时本文控制策略下直流母线电压也更为靠近初始设定电压,产生的电压波动也更小。
图11为事件触发分布式一致性控制策略下,各个ES单元之间的通信触发时刻。可见,在t=0~2 s之间系统逐渐趋于稳定,ES单元之间通信频率逐渐降低;t=2.0 s时负载发生变化,单元之间的通信又开始快速进行,在系统稳定后通信频率降低。
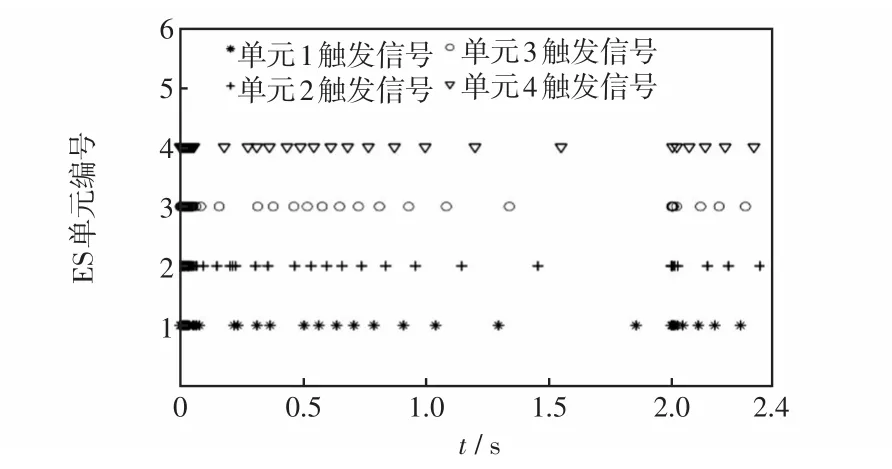
图11 0~2.4 s之间通信触发时刻Fig.11 Trigger time of communication between 0 and 2.4 s
4.3 仿真算例3
在算例3中,PV单元和ES单元共同运行,初始时PV单元处于MPPT运行模式,处于下垂控制的ES单元来稳定母线电压。当ES单元SOC随着充电过程达到上限的80%时,断开运行退出系统,PV单元切换为下垂控制来稳定母线电压。t=2.0 s时增加初始负载的1/3,t=3.3 s时切除初始负载的1/3。采用事件触发分布式一致性控制策略下的ES单元SOC、PV单元输出电流和直流母线电压分别如图12~14所示。
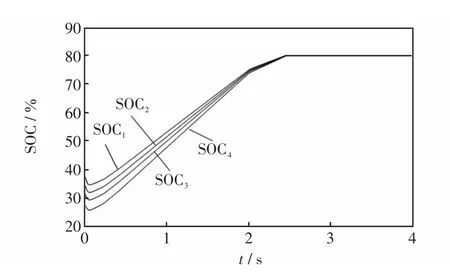
图12 运行状态切换下的ES单元SOCFig.12 SOC of ES unit under switching of operating states

图13 运行状态切换下的PV单元输出电流Fig.13 Output current from PV unit under switching of operating states
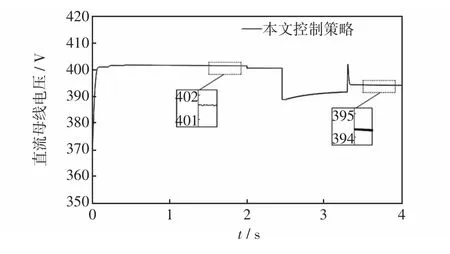
图14 运行状态切换下的直流母线电压Fig.14 DC bus voltage under switching of operating states
由图12~14可见,运行模式切换前各个ES单元充电,其SOC在本文控制策略下逐渐趋于一致,PV单元处于MPPT模式以获得最大输出功率,此时直流母线电压由ES单元来稳定;当t=2.0 s时增加初始负载的1/3,此时ES单元充电速率减慢,SOC增长速率随之减慢,PV单元输出电流短暂波动后回到最大输出功率对应的电流值;当SOC达到上限的80%时,ES单元退出运行,此时PV单元切换为下垂控制模式,PV单元输出电流在二次控制下实现输出功率均分,直流母线电压在跌落后逐渐恢复,保持在母线电压最大允许偏差范围之内;t=3.3 s时切除初始负载的1/3,电流和电压仍能继续保持控制效果。
PV单元之间和ES单元之间的通信触发时刻分别如图15和图16所示。

图15 PV单元通信触发时刻Fig.15 PV units at communication trigger time
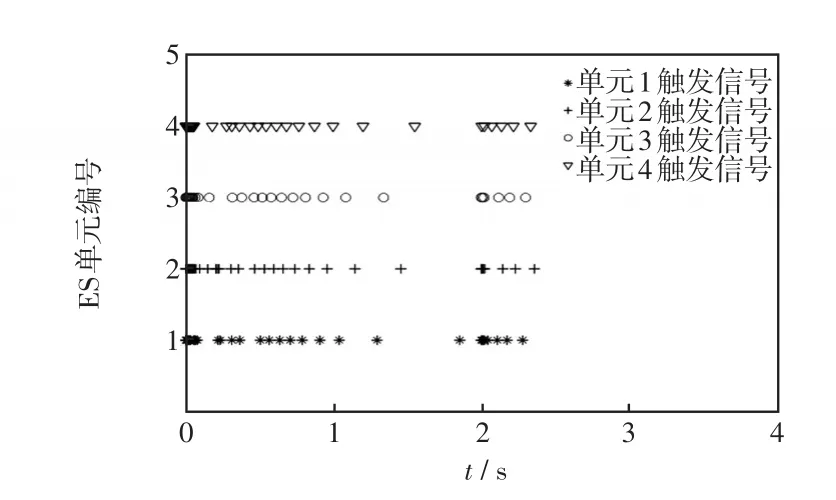
图16 ES单元通信触发时刻Fig.16 ES units at communication trigger time
由图15可知,从开始阶段到ES单元退出运行之前,PV单元处于MPPT模式运行,事件触发控制没有运行,PV单元切换为下垂控制之后事件触发控制启动,系统达到稳态时通信触发频率逐渐减小;t=3.3 s时负载发生变化,此时触发频率增大,系统达到稳态后再次呈现降低的趋势。
由图16可知,在t=2 s之前随着系统达到稳态,ES单元之间的通信触发频率逐渐减小;t=2 s时负载发生变化通信触发频率再次增大,随后呈现逐渐减小趋势,在ES单元退出运行后不再触发。
5 结语
针对孤岛运行的独立光储直流微电网提出了一种基于一致性算法的改进下垂控制策略,在二次控制中应用了一种基于事件触发控制下的一致性控制改进方案。在直流微电网运行时,PV单元既能运行在MPPT模式,也能根据ES单元的状态切换到下垂控制模式参与系统的功率分配和电压调节,和ES单元协调配合,共同维持直流微电网独立运行时内部的功率平衡。在二次电压恢复控制和均流控制下,保证了各单元出力分配的同时实现了直流母线电压的恢复,即使系统产生波动也能使其稳定在初始设定值附近。分布式事件触发预估状态反馈一致性控制器,使得只有二次控制层平均一致性算法平均状态的获取处于事件触发机制中,触发函数仅使用本地单元此时刻状态和上一触发时刻状态。在满足事件触发函数时,与相邻单元进行通信交换状态信息,即可实现控制目标,在系统处于稳态时可以在一定程度上减轻系统的通信负担,避免通信资源的浪费。最后在Matlab/Simulink环境下搭建了相应的直流微电网模型,在不同情况下验证了上述方法的有效性和可行性。