基于惯性传感器的智能安全帽人体跌倒检测系统设计
2022-04-25梁楷博吴有龙潘星颖
梁楷博,吴有龙,苏 杰,沈 亮,潘星颖,郑 坤,叶 晴
(1.金陵科技学院 电子信息工程学院,江苏 南京 211169;2.金陵科技学院 智能科学与控制工程学院,江苏 南京 211169)
0 引 言
近年来,大多数建设管理者都选择物联网技术监管模式来替代传统的人工巡视,以达到安全管理的要求。在工地的安全管理工作中,为施工人员的安全帽引入惯性传感器、蜂鸣器,然后连接阿里云服务器,不失为一个线上线下双报警的良好管理办法。智能安全帽就是物联网技术革新以及生产需求不断提高的智能化产物。
由于系统中的传感器类型不同,可以将跌倒检测系统分为基于环境的跌倒检测系统、基于图像的跌倒检测系统和基于可穿戴设备的跌倒检测系统。基于环境的跌倒检测系统是将各种传感器放在活动区域,通过检测摔倒时发出的反馈信息来判断用户是否摔倒。但基于环境的跌倒检测系统易受外部环境干扰,且条件限制较多,难以满足实际要求。基于图像的跌倒检测系统主要通过安装摄像头,并对采集的图像进行处理,从而判断用户的身体状态。Alemdar等人通过摄像头与惯性传感器采集用户信息,在此基础上进行摔倒检测。基于图像的跌倒检测系统受位置因素的限制,无法在室外进行跌倒检测,存在较大的局限性。
基于可穿戴设备的跌倒检测系统通过佩戴在用户身上的传感器进行数据采集,然后对采集的数据进行分析,从而判断用户的行动状态。目前,市场上大部分跌倒检测系统都是基于穿戴设备的跌倒检测系统,但效果难以让用户满意。一方面,设备过于笨重且需要频繁充电,导致佩戴不便;另一方面,跌倒检测算法还不完善,经常出现误报。本文利用嵌入式技术、传感器技术、通信技术和物联网技术等设计了一种基于惯性传感器的智能安全帽人体跌倒检测系统。
1 系统设计
基于惯性传感器的智能安全帽人体跌倒检测系统流程如图1所示。该系统由硬件和软件构成,硬件部分包括惯性传感器MPU6050、蜂鸣器、通信模块Air202s、定位模块ATGM336H,负责采集数据并传输信号至STM32单片机;软件部分主要为管理者实时监测施工人员是否跌倒和位置信息提供平台,同时存储历史信息。北斗模块将佩戴安全帽的施工人员实时精确位置信息通过网络传送至数据库,通过GPRS数据传输联网功能捕获位置信息。

图1 系统流程
2 相关技术
2.1 北斗卫星定位技术
北斗卫星导航定位系统是我国自主研发并且独立运行的卫星导航系统,与目前的全球定位系统GPS、GLONASS和GALILEO相比,北斗卫星导航定位系统的性能符合设计要求,相较于其他卫星导航定位系统,有着更加优秀的信号强度和定位精度。空间段、地面段和用户段共同组成了北斗定位系统,卫星信号传播路径示意图如图2所示。

图2 北斗卫星信号传播路径示意图
2.2 MQTT协议
MQTT全称为Message Queuing Telemetry Transport,也被称为消息队列遥测传输协议。MQTT协议于1999年由IBM公司发布,该协议在TCP/IP协议的基础上发展而来。MQTT最大的优点在于,为设备提供可靠性高、实时性强的消息服务时,无需使用大量代码以及对带宽无较大要求。MQTT作为一种即时通信协议,具有低开销和低带宽等优点,使其在移动应用方面,特别是在物联网项目中有较广泛的应用。
2.3 跌倒检测技术
跌倒检测目前有三种方案,分别是基于环境的跌倒检测、基于视频的跌倒检测以及基于穿戴设备的跌倒检测。基于环境的跌倒检测利用压力传感器来监测压力变化,当压力变化超过正常状态时,就判断为跌倒;基于视频的跌倒检测利用监控摄像头拍摄视频图像,再利用机器学习,将拍摄到的视频或图像与正常状态进行比对,从而实现跌倒判断。基于穿戴设备的跌倒检测利用加速度计与陀螺仪进行,当加速度以及角度超过设定阈值时,就判定为跌倒。
在阈值判断检测算法中,为解决人跌倒时方向的不确定性对测量数据造成影响的问题,引入了SVM(Signal Vector Magnitude, SVM)人体加速度向量幅值,定义如下:

式中:a,a,a是三维空间坐标系中X,Y,Z轴上的加速度;SVM为加速度的矢量和。
利用SVM可以完整反映跌倒时加速度的变化,同时不受跌倒方向的影响,极大降低了算法的复杂度。现有的阈值判断算法以SVM判断人体是否跌倒为基础。步行过程中跌倒的SVM波形如图3所示。

图3 步行跌倒时SVM波形图
从图3中不难发现,人在正常步行时,SVM通常围绕1g上下浮动,而在跌倒时,人体会在一段时间内呈现失重状态。但SVM的最小值一般为0.4g,在跌倒触地瞬间,SVM出现最大值,一般为1.6g。基本阈值判断检测算法对SVM进行判断,将加速度传感器采集的加速度数据进行数据融合得到SVM,如果SVM值围绕1g上下浮动,则判定为正常状态;如果SVM的值超出了正常阈值,则判定为跌倒状态。
2.4 GPRS技术
GPRS的全称为General Packet Radio Service,也被称为通用无线分组业务,是一种以GSM技术为基础的分组交换技术。随着信息技术的发展,移动通信至今为止已经发展到第五代。第一代为模拟无线网络;第二代是数字通信,包括GSM和CDMA;第三代是分组型移动业务,最广泛的应用是WCDMA和CDMA2000,也被称为3G;第四代数字通信被称为4G,其目标是使移动网络具有宽带上网能力;第五代是最新的数字通信技术,也被称为5G,它是4G技术的发展和延伸。GPRS技术是第二代数字通信技术和第三代数字通信技术的混合体,具有GSM技术的通话服务,并为用户提供分组形式的数据业务,适用于传输数据量较小且传输频繁的数据。
2.5 STM32单片机
STM32单片机的内核为ARM Cortex-M3,该内核具有性能高、成本低和功耗低等优点。在本系统中,选用的单片机型号为STM32F103C8,该产品器件采用3.6 V电源供电,正常工作的温度范围为-40~85 ℃。STM32F103C8系列有多款产品,这些产品包含不同的外设集,用户可根据自身需求选择。STM32F103C8包含1个12位的ADC、2个比较器、2个16 位通用定时器、2个32位通用定时器、2个16位基本定时器、2个16 位高级定时器。还包含标准的通信接口:2个IC接口、3个SPI接口、1个USBOTG接口、1个CAN接口、1个SDIO接口和8个UART接口,完全满足本系统的使用需求。本系统连接方式如图4所示。

图4 实物连接图
3 功能阐述
3.1 用户功能
当跌倒检测模块检测为异常状态时,蜂鸣器发出警报,并提供施工人员位置信息。若该状态并非跌倒状态,则施工人员可自行按下按键解除蜂鸣器报警。
3.2 管理者功能
在后台查看施工人员信息,若有施工人员被判定为跌倒状态,可在后台看到该施工人员状态为异常(红色),并显示施工人员的位置信息,如图5所示。

图5 跌倒状态的Web界面
4 硬件设计
STM32单片机主要负责硬件系统的功能实现。STM32单片机供电后先将定位模块、跌倒检测模块以及通信模块初始化,随后通过串口接收定位模块发来的GPS信息,若GPS信息为无效信息,则继续接收定位模块发送的定位信息;若GPS信息为有效信息,则对该信息进行拆分,提取出经纬度信息,并将经纬度信息通过串口发送到通信模块。跌倒检测模块进行身体姿态的判定,如果判断为正常状态,则每隔15 s将身体状态信息与经纬度信息通过通信模块发送到阿里云平台;如果跌倒检测模块检测到了倾角变化,且倾角大于90°,维持时间大于15 s,则判断为跌倒状态,蜂鸣器发出警报。此时,如果该状态并非真实跌倒状态,则可以通过按下按键解除蜂鸣器报警,否则,蜂鸣器持续报警,并将跌倒状态以及经纬度信息通过通信模块上传至阿里云平台。本系统的硬件电路设计如图6所示。
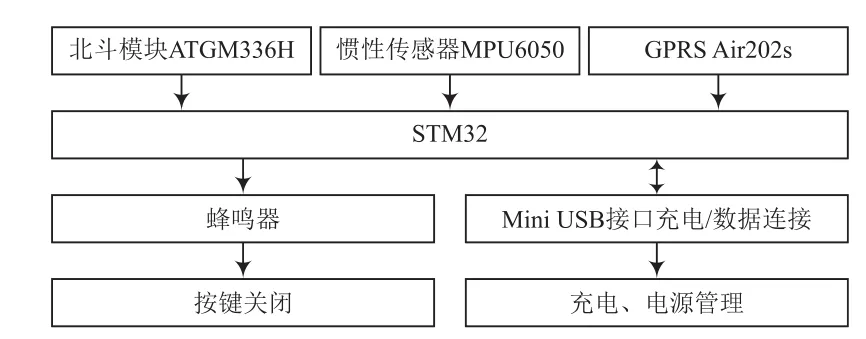
图6 硬件电路设计
5 结 语
本系统主要实现了基于惯性传感器的智能安全帽人体跌倒检测系统。施工人员的安全问题是当前关注的重点,本产品对施工人员的安全帽进行创新升级,可以及时对施工人员由于高温、心脏疾病等原因出现的跌倒或昏迷做出反应,并发出警报提供位置信息,为施工人员的生命安全提供保障。相比于传统人工巡视,该系统在提高工作效率的同时大幅节省了人力资源。
