基于UWB的三维定位分析与算法研究
2022-04-25吕鹏博张岳魁
吕鹏博,张岳魁,2
(1.石家庄学院 计算机科学与工程学院,河北 石家庄 050035;2.石家庄学院 河北省物联网智能感知与应用技术创新中心,河北 石家庄 050035)
0 引 言
近年来,基于位置信息的通信服务广受关注,室外环境定位技术已经成熟,而室内定位技术仍不能普适化全面推广。室内环境大多使用的定位技术为地磁、红外、ZigBee和WiFi等,而在打造智慧城市的时代背景中,对于室内、小范围、短距离的位置服务需求越来越迫切,要求越来越精准即时。在医院、隧道、地下停车厂乃至工厂等定位信号失真以及应急救援的场景下,急需一种精度更高的新技术投入使用。超宽带UWB作为一种精度高、功耗低、稳定性好、穿透力强的定位技术,非常适用于狭小的室内场景,随着室内定位需求的增长,UWB得到了市场青睐,其具有广阔的发展前景和较好的市场潜力。
基于UWB的三维定位算法可用于机器人、无人机以及雷达航空等领域,成为国内外学者研究的重点。文献[10]在测距和定位方面做了相关研究,设计了空气折射率以及晶振实际频率测量方法。文献[11]重点研究了几种室内定位算法的原理并提出了双重EKF算法以及自适应多重EKF算法。文献[12]提出了一种基于图优化的室内超宽带定位算法,降低了定位误差。文献[13]建立了基于UWB的三维定位模型,分析对比几种滤波方法(在所需时间、性价比和精度方面进行比较)。文献[14]提出了一种基于遗传算法的超宽带定位系统,利用遗传算法求解方程,获得未知节点坐标。文献[15]提出了一种基于深度学习的超宽带定位系统,将定位问题转化为回归问题。文献[16]将室内定位分为静态定位和移动定位,并且针对两种定位方式提出了不同的优化方法。
本文基于Qt框架实现了上位机与UWB下位机的通信,完成了室内三维定位,验证了不同障碍物遮挡对定位精度的影响,并在此基础上对基站布设原则进行分析,给出最佳基站布设方法,以便提高定位精度,降低定位误差。本文采用UWB技术在三维空间固定4个基站,移动目的标签,通过计算坐标数据获得标签位置,并对坐标数据计算方式进行优化。实验表明,采用最小二乘拟合矩阵算法可以使定位精度提高约26%。
1 定位设计与算法研究
1.1 系统设计
UWB三维定位系统由基站、标签和上位机构成。定位系统硬件部分主要包括定位基站和移动标签,两者在收发信号的过程中尽量保持频率、精度一致。硬件部分主要由STM32F103RCT6核心微处理器模块、DWM1000模块、外围电路、数据传输接口和电源供电模块等组成;软件部分为上位机,主要利用Qt库编写的操作软件显示基站和标签的坐标。系统结构如图1所示。
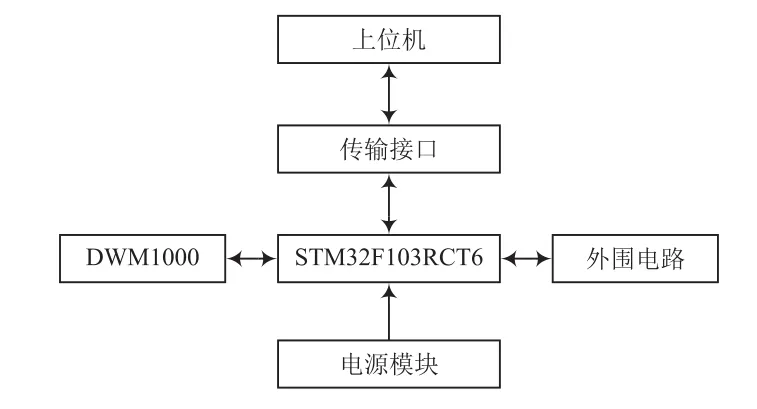
图1 系统结构
1.2 定位测距方法
UWB定位测距方法主要为双边双向测距法,原理如图2所示。设备A发射UWB信号,经过时间T,设备B接收UWB信号,响应时间为T,然后发送信息返回给设备A,经过时间T,设备A接收到B的信号,响应时间为T,再次发送信号给设备B,经过时间T,设备B接收到UWB信号,至此通信完成。

图2 双边双向测距原理
UWB测距进行了2次信息交换,过程获得了3次飞行时间T,设备A和设备B记录时间戳,利用所得的时间差计算距离,虽然牺牲了一点时间但提高了测距精度,降低了测距误差,计算公式如下:

推导方式如下:

推出飞行时间T后,可得飞行距离R=c×T,其中c表示光速,为减少误差,设备A和设备B的时钟精度尽量保持一致。
1.3 定位三边测量法
在三维空间中建立x,y,z三维坐标系,此时处于空间中的所有点都可以用三维坐标(x, y, z)表示。由于4个点可构成三维立体空间,所以在三维空间中取A(x, y, z),B(x,y, z),C(x, y, z),D(x, y, z)4个不同的基站作为固定坐标,移动标签X(x, y, z)到4个基站的距离分别为R,R,R,R,则可得以下线性方程组:

将式(3)展开并计算后可得以式(4)、式(5):

将上述非齐次线性式转化为矩阵相乘的形式,假设为AX=B的形式,得出下式:
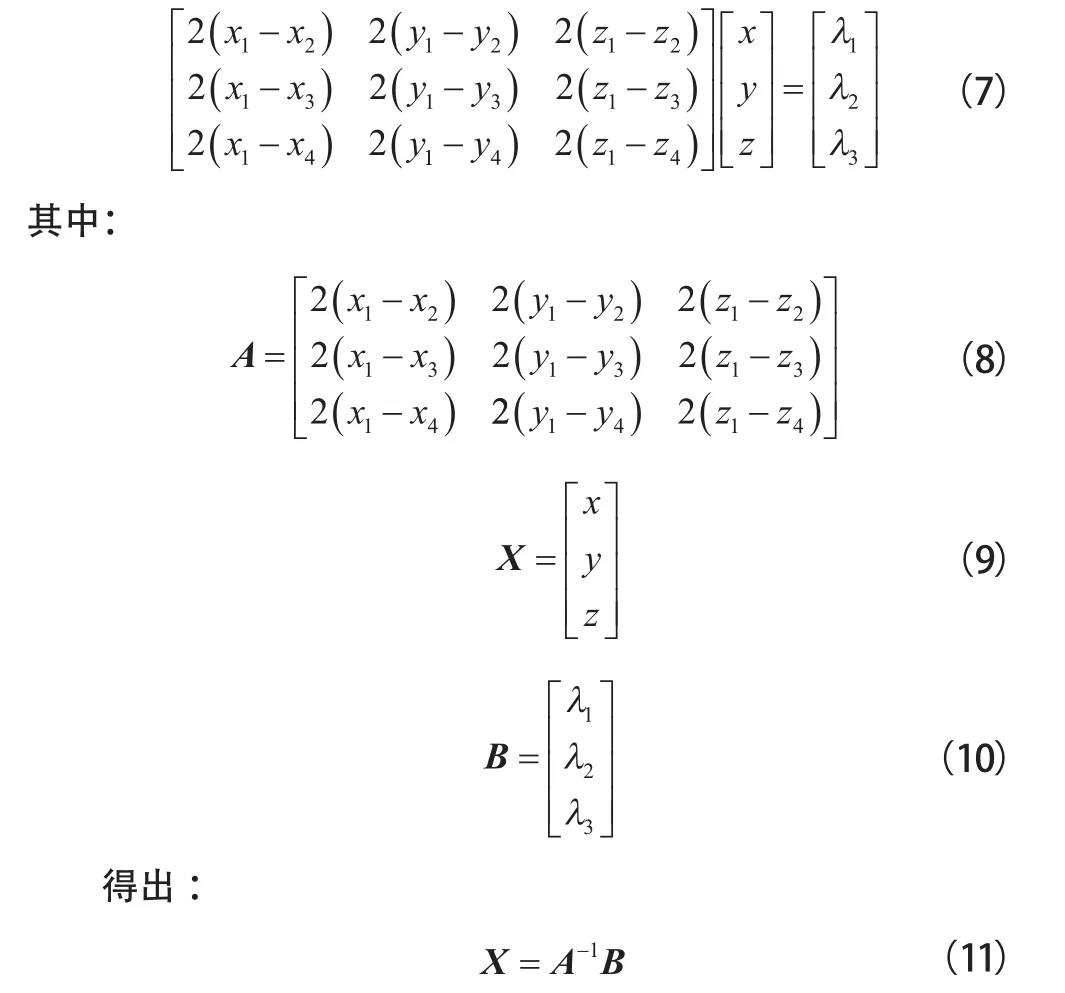
求解该方程组即可计算出移动标签X对应的(x, y, z)坐标值,但需确保矩阵A可逆。
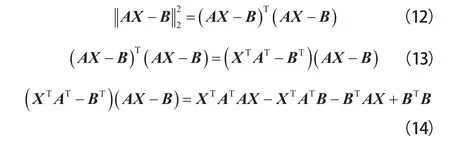
1.4 最小二乘拟合矩阵法
通过三边测量法测得的标签坐标数值存在一定误差,采用最小二乘法拟合矩阵的方式可以获得更精确的坐标数据。

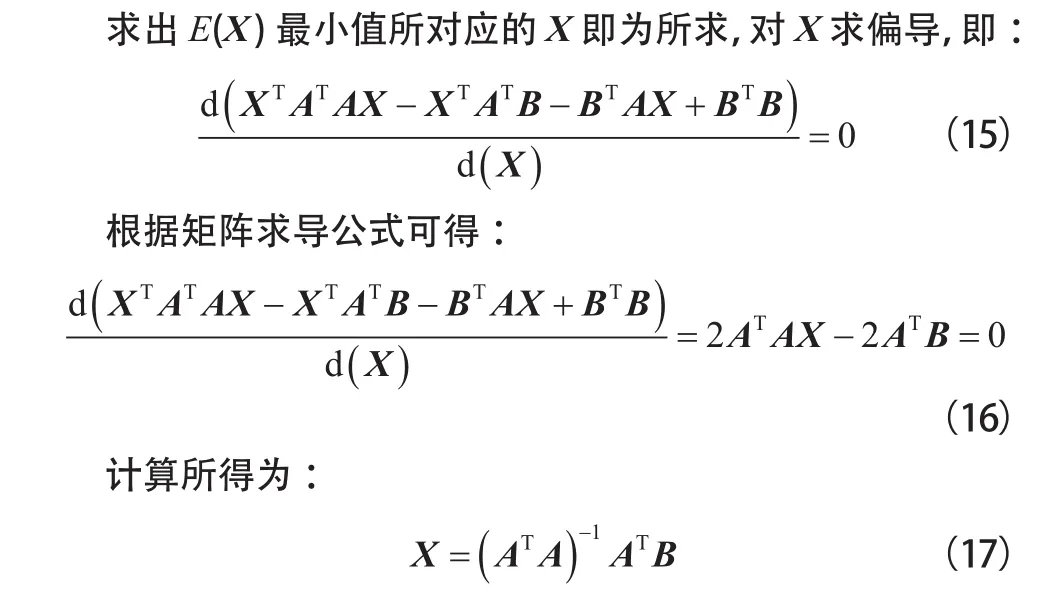
求解该方程组,即可计算出移动标签X所对应的(x, y, z)值,但需确保矩阵A可逆。
2 定位实验与分析
2.1 实验场景
在石家庄学院尚学楼三楼计算机科学与工程学院办公室搭建实验场景,将4个基站放置在设计好的位置,摆放时使每3个基站的位置连线呈现等边三角形,即在1个正方体的4个角上摆放基站,目的标签可在正方体三维立体空间自由移动,摆放位置对应坐标如图3所示。

图3 定位场景搭建示意图
2.2 不同遮挡物的测距分析
UWB三维定位系统的测距分析实验场地选在石家庄学院尚学楼三楼西北角办公区域,测试区域内包含人员走动、桌椅杂物、墙体等不同遮挡物。为降低定位误差,本次测试首先对测试数据进行预处理,消除可控误差,对同一组数据多次测试,并取其平均数作为测得结果。三维系统场景搭建好后,选择15个标准距离测试点,依次编号为A1,A2,…,A15,相邻两个测试点距离1 m,然后将标准距离与实测距离做差值统计,进行数据分析。
2.2.1 无遮挡物测距实验
图4所示为无障碍物遮挡情况下使用三维定位系统在15个标准测试点实际测量距离和标准距离之间的对比折线图,实际测量距离数据为多次测量结果的平均值,其中黑色为标准距离,灰色为实测距离。图5为无障碍物遮挡情况下每个测试点对应的测距误差柱状图。
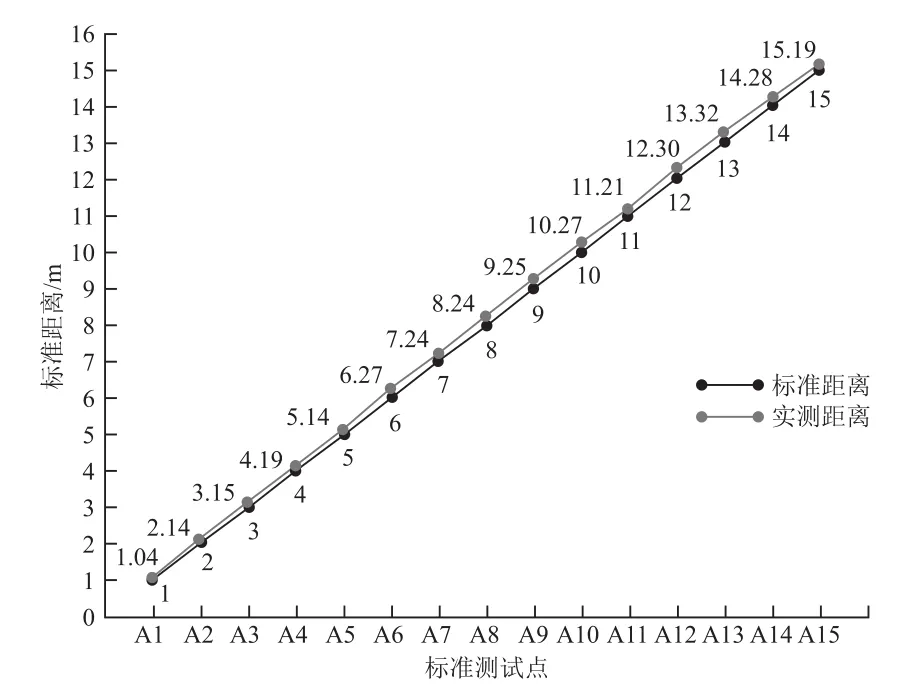
图4 无遮挡测距数据折线图
由图5可知,在无障碍物遮挡情况下,实测距离略微大于标准距离,测距误差为厘米级别,最大误差约为32 cm,最小误差为4 cm。随着测试距离由近及远,测距误差也由小变大,两者呈现正相关关系:测试距离越近,测距误差越小,测试距离越远,测试误差越大。就整体而言,无障碍物遮挡的UWB定位误差较小且稳定,定位精度较高。
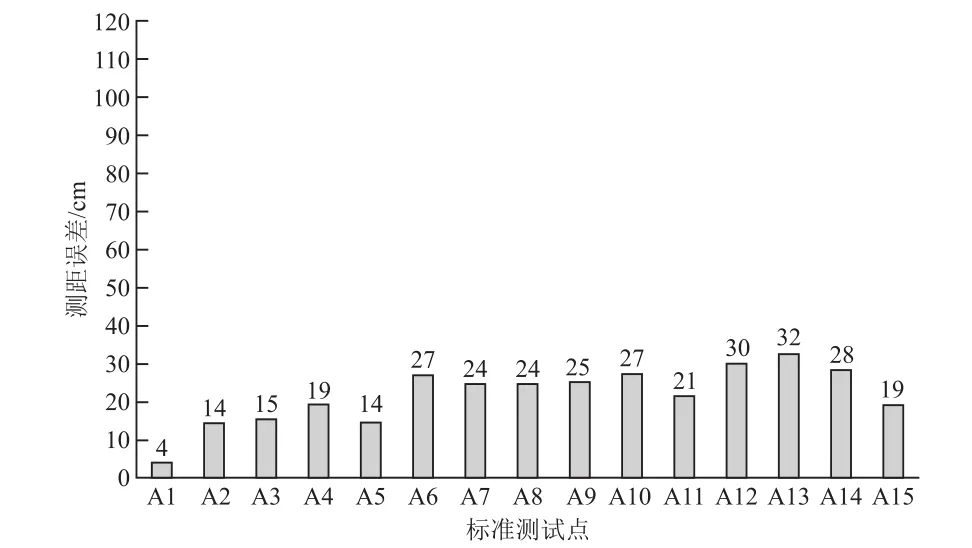
图5 无遮挡测距误差柱状图
2.2.2 桌椅杂物遮挡测距实验
图6所示为桌椅杂物等障碍物遮挡情况下,使用三维定位系统在15个标准测试点实际测量距离和标准距离之间的对比折线图,实际测量距离数据为多次测量结果的平均值,其中黑色为标准距离,灰色为实测距离。图7为桌椅杂物等障碍物遮挡情况下每个测试点对应的测距误差柱状图。

图6 桌椅杂物遮挡测距数据折线图
由图7可知,在桌椅杂物等障碍物遮挡情况下,实测距离大于标准距离,最大误差约为58 cm,最小误差为7 cm,误差浮动较大,测距误差高于无障碍物遮挡实验的误差。但从折线图可以看出,A8测试点之后两条折线近乎平行,误差值基本稳定,可得出UWB信号在穿透木质等材料时产生的误差趋于常数,且距离越近,误差越小,A1~A7测试点的误差与无遮挡时误差区别不大,也验证了UWB信号具备穿透力强、抗干扰效果好等优点。

图7 桌椅杂物遮挡测距误差柱状图
2.2.3 墙体遮挡测距实验
图8所示为墙体障碍物遮挡情况下使用三维定位系统在15个标准测试点实际测量距离和标准距离之间的对比折线图,实际测量距离数据为多次测量结果的平均值,其中黑色为标准距离,灰色为实测距离。图9为墙体障碍物遮挡情况下每个测试点对应的测距误差柱状图。
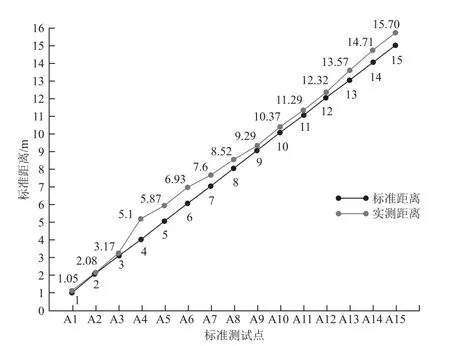
图8 墙体遮挡测距数据折线图
由图9可知,在墙体障碍物遮挡情况下,误差上下浮动较大,测距误差远高于无障碍物和桌椅杂物遮挡实验的误差。UWB信号在墙体上可能发生反射导致能量降低,进而误差变大。但总体而言,在误差允许范围内同样可以实现标签定位。
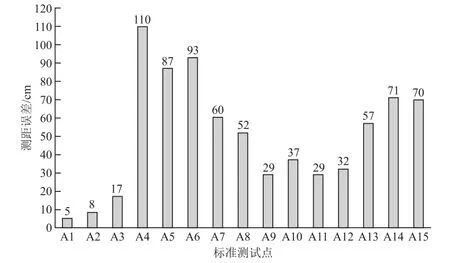
图9 墙体遮挡测距误差柱状图
2.3 定位算法分析
将4个基站如图3所示摆放到三维空间相应的位置,测量实际距离后设置4个基站坐标分别为(0,0,210),(210,210,140),(210,0,0),(0,210,0),单位为cm,随后将移动标签放在10个不同的位置,同一个点进行10次定位测量,然后把每次测得的坐标数据和实际位置坐标数据的差值进行统计,求出每个点的坐标数据平均值,以便降低测量误差。使用直接矩阵法和最小二乘法拟合矩阵算法分别计算移动标签坐标数据,见表1、表2所列。

表1 直接矩阵算法数据表
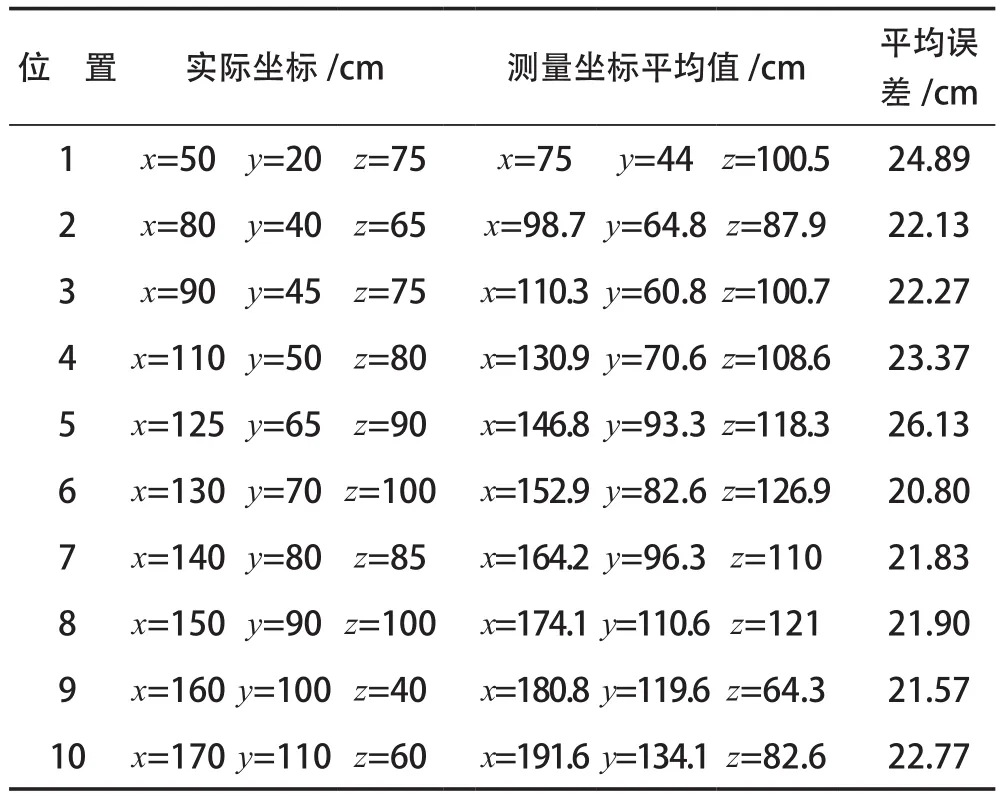
表2 最小二乘法拟合矩阵算法数据表
根据上表坐标数据的对比分析,可以计算出直接矩阵算法的平均误差为30.59 cm,最小二乘拟合法的平均误差为22.76 cm,平均误差降低了7.83 cm,精度约提高了26%。实验证明,使用最小二乘拟合矩阵的方法可以获得更加精确的坐标数据,提高三维定位的精准度。
2.4 基站布设方式
经多次实验可知,定位基站的布设方式和排列与定位精度相关。理论上基站数量越多,收到数据越多,获得结果精度越高,但实际应用中,需考虑成本与效率,因此不会布设太多基站,所以需要研究基站布设的最佳方式。
基站布设要保持空间的连续性和区域重复覆盖。只有标签在基站的有效半径范围内,才能获取坐标数据,基站所覆盖的范围要包含所有可移动目标标签位置信息。实现三维定位至少需要4个基站的测距信息,所以需保证空间内的每个点至少有4个基站的信号覆盖。假设标签到基站的距离为R,基站的有效半径为r,当R≤r时可以保证标签位置在基站信号覆盖的有效范围内,接收UWB信号。反之,当R>r时,标签位置超出基站信号覆盖的有效范围,无法接收UWB信号,造成定位错误无法获得坐标数据。图10(a)所示的灰色阴影部分位置的标签可以被4个基站覆盖信号,而图10(b)中灰色阴影部分位置的标签无法获得基站信号。
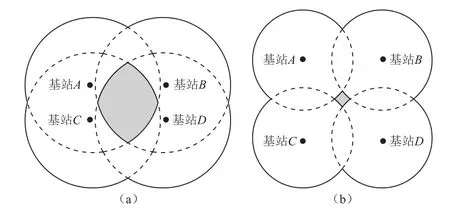
图10 基站布设平面示意图
基于以上基站布设的分析,并结合实验场景布置方式可知,在保证标签位置在基站有效半径范围内的同时,发现矩形立方体布设方式相比环形布设、随机布设的方式,定位精度更高,为今后更好地研究UWB三维定位系统提供了思路和方向。
3 结 语
超宽带技术是室内定位的主流技术,其发射的信号具有穿透性强、功耗低和抗噪声能力强等特点。本文主要实验了多组不同遮挡物对定位测距的影响,验证了UWB穿透力强等优点,分析对比了测距误差,并给出最佳的基站布设原则,确定了定位标签的有效移动范围。同时,对UWB的三维定位算法及坐标数据计算方法进行了对比实验。实验数据表明,使用最小二乘拟合矩阵求解算法可以降低测量误差,提高标签坐标数据准确度,使得三维定位更加准确。
