基于辅助轴承碰摩的磁支撑-转子系统响应分析*
2022-04-24张凌云刘俊杰张勇霍佳波
张凌云 刘俊杰 张勇 霍佳波
(1 桂林航天工业学院 机电工程学院,广西 桂林 541004;2 塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300)
磁悬浮支撑-转子系统,其原理是利用电磁力将转轴无接触地悬浮起来,因此将其称之为主动电磁轴承(Active Magnetic Bearing, AMB),但是由于AMB系统固有的不稳定性和抵抗突发载荷的能力不足,实际使用中都要增设一套辅助支承,电磁轴承中辅助轴承作为一种保护装置,用于当转子系统受外部激励干扰或系统出现故障时起临时支撑的作用,防止转轴与电磁轴承直接接触造成损伤,达到保护电磁轴承系统的目的,转轴与辅助轴承会发生瞬间碰摩接触,由于转速较高,会造成较大幅度的振荡,同时产生很大的瞬间载荷。万金贵等人[2]通过对磁悬浮支撑的铣床主轴样机进行研究表明,辅助轴承的振动影响不仅不能忽略,甚至它对整个系统的安全运行有着至关重要的作用。赵皓宇等人[3]对磁悬浮双转子系统定点碰摩特性研究表明:碰摩发生时可观察到整数倍 转频差频率分量,随着碰摩程度的加剧,分数阶转频差频率分量出现;碰摩过程中的最大接触深度和冲击力取决于初始冲击速度。Wang X等人[4]基于数值仿真法研究发现:当磁悬浮-转子与辅助轴承发生碰摩时会出现亚谐振动、拟周期振动以及混沌振动。文献[5]对同时考虑转盘和辅助轴承的电磁轴承-转子系统进行了研究,研究发现,系统响应具有丰富的非线性动力学行为,包括多周期运动、拟周期运动和混沌,并且在速度参数范围内存在多个吸引子,在受到外界激励的影响会发生失稳。文献[6-7]对磁支撑转子的辅助轴承碰摩,非线性动力学进行了研究,得出偏心量U为影响该转子系统动力学的主要参数,但该文章均未考虑转盘对系统的影响,文献[8-10]作者通过实验详细的阐述了磁悬浮转子系统的动力学行为。
本文主要研究了在磁悬浮支撑下的转轴与辅助轴承发生碰摩对系统动力学行为的影响,采用四阶Runge-Kutta对含碰摩力、偏心量等一系列强非线性条件下的系统进行数值积分,对得出系统的分岔图、轴心轨迹图、Poincaré映射图、最大碰摩力分布图、时间历程图进行综合分析,通过研究系统参数改变对转子系统碰摩冲击及分岔特性的影响,辨识出系统参数对转子系统动力学行为的影响,得到转子系统参数与系统周期运动合理的匹配区间。
1 系统动力学模型
本主动电磁轴承-转子系统是以Jeffcott转子模型为基础建立的含有辅助轴承的主动电磁轴承—转子系统模型,如图1所示,其中转子圆盘的质量用2M1表示,M2为轴颈集中在轴承处的质量,C为转盘一半的阻尼系数,U为转子的偏心量,Ks表示转轴刚度系数的一半,δ为转轴稳定运行时转轴外径与辅助轴承的径向间隙,μ为辅助轴承的摩擦系数,g0为电磁轴承(AMB)的标准气隙,且该气隙大于转轴与辅助轴承的径向间隙δ,从而避免由于系统运动过程中非线性行为导致的不平衡运动使得轴颈与电磁轴承发生接触。这里假设只考虑转轴的径向振动,忽略其轴向振动。

图1 电磁轴承-转子系统模型图
1.1 系统动力学方程
系统的有量纲运动微分方程为:
(1)
设转盘几何中心的径向位移为X1和Y1,右端转轴几何中心的径向位移为X2和Y2,式中PX,PY为碰摩力,FX,FY为电磁力,g为重力常数,Ω为转子的角速度。
1.2 碰摩力模型
图2为转轴与辅助轴承发生碰摩示意图。由于碰摩时间非常短暂,碰摩时的变形可以看成线性变形,将其视为局部发生碰摩,转轴和辅助轴承间的碰摩符合库仑定律。当碰撞发生时,法向碰摩力Pn、切向碰摩力Pt可以表示为[11]:
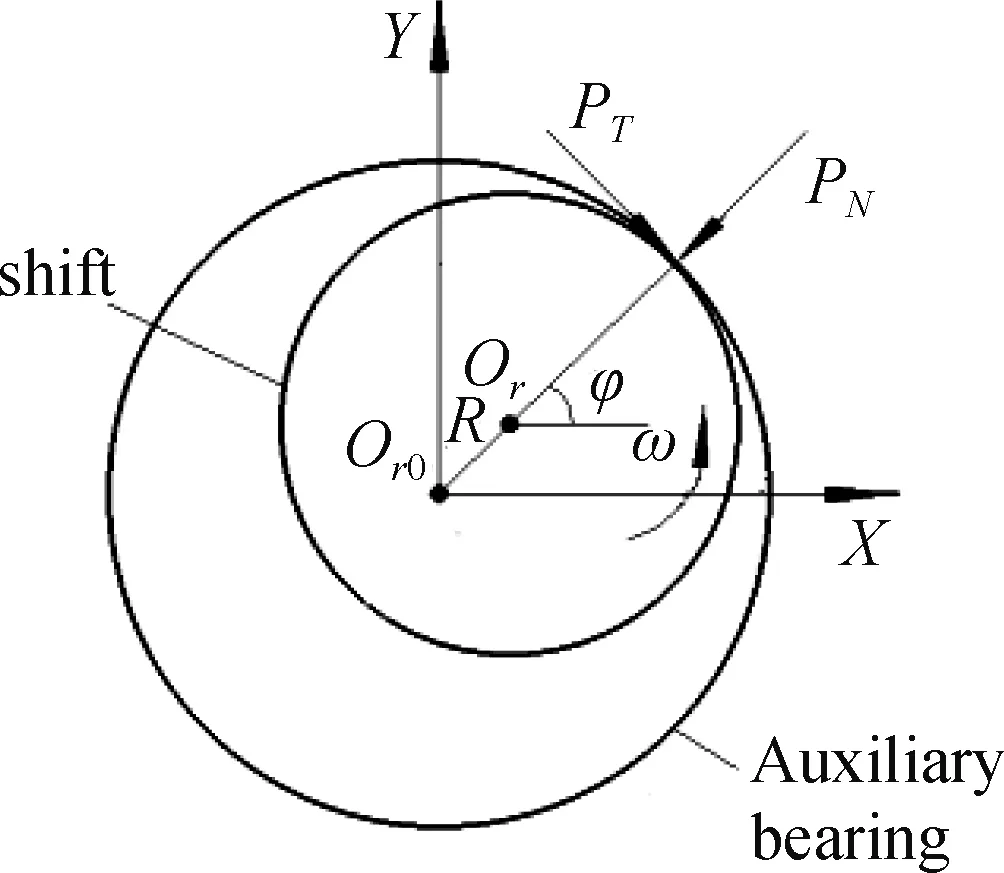
图2 转轴-辅助轴承碰摩示意图
(2)
式中:r表示转轴的径向位移,d为转轴外径与辅助轴承的间隙,kc为碰摩刚度,μ为库伦摩擦系数。碰撞发生时,将法向碰摩力Pn、切向碰摩力Pt分解到直角坐标系X和Y轴上得:
(3)
1.3 电磁轴承的电磁力
主动电磁轴承的电磁力作用在x和y方向上的分力分别为Fx和Fy,可表示为[5]:
对访谈问卷的内容进行统计,统计内容包括各题项被提及次数、各层次题项联系频数。依据统计数据,构建游客中心“属性层-结果层”的关系矩阵A-C与“结果层-目的层”关系矩阵C-V,Ai-Cj(i=1,2…17;j=1,2…14)、Ci-Vj(i=1,2…14,j=1,2…7)表示各观测题项之间的联系强度,即被受访者提及的次数,矩阵如表4所示。如A5-C1=36说明超过半数的受访者认为“游客中心中员工的职业素质”对于他们“获取有价值的信息”会产生影响,体现出二者之间较强的联系。同理,C1-V2=23表明有23位受访者认为“获取有价值的信息”是出于“追求高的生活品质”这一使用目的。
(4)
其中:P为比例反馈增益,D是微分反馈增益,α为几何耦合参数。
为了进行系统的动力学研究引入以下无量纲参数:
(5)
得出系统的无量纲微分方程:
(6)
2 数值仿真与分析
2.1 系统的Poincaré截面、最大碰摩力、占空比


2.2 无辅助轴承碰摩的转子系统动力学响应
取基准参数:P=1.1,α=0.21,D=0.03,W=0.025,kc=1.0,得到图3(a)和(b)为无碰摩故障时辅助轴承处转轴几何中心和转盘几何中心随转速增大的响应分岔图,系统各转速参数域内的响应状态如表1。结合图3和表1可见,沿着转速增大的方向,系统依次经历了周期1运动-周期2运动-拟周期-周期1运动。转速较低时,系统为稳定的周期1运动,在转速ω=0.51时,系统发生跳跃分岔,转迁为周期2运动,原因是电磁涡动加剧导致系统失稳,系统经历短暂的周期2运动后,通过逆倍化分岔进入周期1运动,随着转速的增大,当转速ω=1.75时,系统通过Neimark-Sacker分岔转迁进入拟周期运动,当转速增大至ω=2.0时,系统退出拟周期,进入稳定的周期1运动。
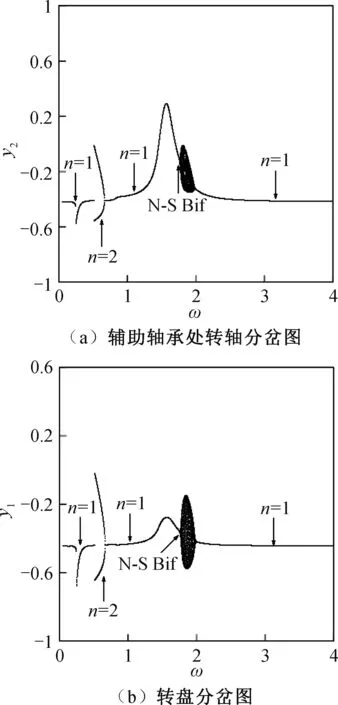
图3 无故障转子系统分岔图

表1 系统响应分布
为了说明不同转速下的运动状态,得到图4,其中黑色的点表示Poincaré截面图,虚线单位圆为电磁轴承的内圈,表示限制转轴轨迹的极限边界。图4(a)为转速ω=0.2时辅助轴承处转轴的轴心轨迹图、Poincaré截面图、时间历程图,此时的轴心轨迹图为一个封闭的圆,Poincaré截面图是一个点,时间历程图为统一幅值的波浪,说明该转速状态下系统为稳定的周期1运动。随着转速的增加,电磁涡动逐渐加剧,系统在ω=0.51时发生跳跃分岔,进入周期2运动,图4(b)ω=0.55时转子的轴心轨迹图、Poincaré截面图和时间历程图,该转速下Poincaré截面图为两个离散的点,说明系统在电磁涡动的影响下做周期2运动,沿着转速增大的方向,系统退出周期2运动,经历较长的周期1运动后通过Neimark-Sacker分岔转迁进入拟周期运动,图4(b)ω=1.9时转子的轴心轨迹图变现为轮胎状,Poincaré截面图呈现出环状,时间历程图为有序的波浪,此状态为典型的拟周期运动。当转速继续增大到ω=2.0时,系统经再此Neimark-Sacker分岔退出拟周期,进入稳定的周期1运动。
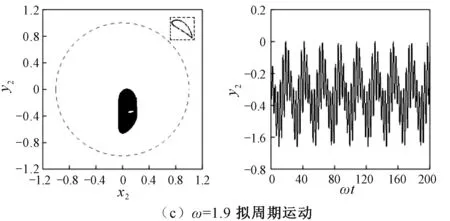
图4 无故障转子不同转速对应的轴心轨迹图、Poincaré截面图、时间历程图
通过前文分析可见,系统沿着转速增大的方向由原有的周期1运动经Neimark-Sacker分岔进入拟周期,该过程在 Poincaré截面映射投影图上体现为稳定的单个不动点逐渐扩散至周围形成一个封闭的吸引不变圈见图5。


图5 不同转速对应的Poincaré映射图
转轴与辅助轴承碰摩发生时,转轴和转盘存在整体的能量传递,应将其作为一个耦合的整体来考虑,前期的研究只考虑了轴承的转轴部分,从而忽略了转盘对转子系统的影响,本文的创新点就是在研究转轴和辅助轴承发生碰摩时考虑了转盘对系统的影响。因此,本节将对其进行重点分析,碰摩刚度kc=ks,得到系统随转速变化对应的分岔图、最大碰摩力分布图和占空比分布图。
基于基准参数,取转轴与辅助轴承间隙d=0.5,得到图6(a-d)分别为kc=ks时转轴几何中心与转盘几何中心的响应的分岔图、最大碰摩力分布图和占空比分布图,由图6(c)和(d)可以看出ω<0.23时,最大碰摩力和占空比均为0,可知系统未发生碰摩,系统主要受电磁力和偏心量的作用,此时系统的响应和图3一致,当ω≥0.23时,最大碰摩力和占空比开始持续增加,说明此时转轴与辅助轴承发生了碰摩,在碰摩逐渐剧烈的过程中,系统的动力学行为发生了改变,混沌和较复杂的多周期运动代替了无故障条件下的周期2运动,转速不断增大的方向,系统依次经历了周期1运动-拟周期运动-混沌-拟周期运动-周期1运动,混沌区域对应的最大碰摩力和占空幅值急剧变化,说明转轴与辅助轴承的碰摩作用使系统的动力学响应复杂化。

图6 碰摩转子系统分岔图、最大碰摩力分布图、占空比分布图
将考虑转轴和辅助轴承碰摩条件下不同转速对应的响应与无碰摩故障时(图4)对比分析。图7为碰摩转子不同转速对应的轴心轨迹图、Poincaré截面图和时间历程图,其中圆点表示Poincaré截面图,实线为轴心轨迹,虚线单位圆为电磁轴承的内圈,表示限制轴颈轨迹的极限边界,点画线表示辅助轴承的内径,轴心轨迹超过点画线的轨迹为发生碰摩。图7(a)为转速ω=0.2时辅助轴承处转轴的轴心轨迹图、Poincaré截面图、时间历程图,此时系统的响应与图4(a)完全一致,说明转速较低时,系统未发生碰摩,反应在最大碰摩力分布图和占空比上为Pmax=0,DC=0。随着转速的不断提高,系统的碰摩力逐渐加剧,导致其出现失稳现象,从转速ω=0.55时对应系统响应图图7(b)可看出,此时为有碰摩的周期4运动。转速持续增大,在ω=1.9时,从系统的相应图可看出为混沌区域,可见碰摩力的影响使得无碰摩条件下的拟周期运动转迁为混沌,主要原因的碰摩力对系统产生了扰动,导致系统的稳定性降低,在转子运动过程中应尽快通过此区域,降低碰摩力对系统的冲击扰动。
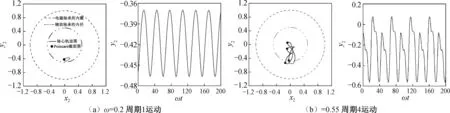
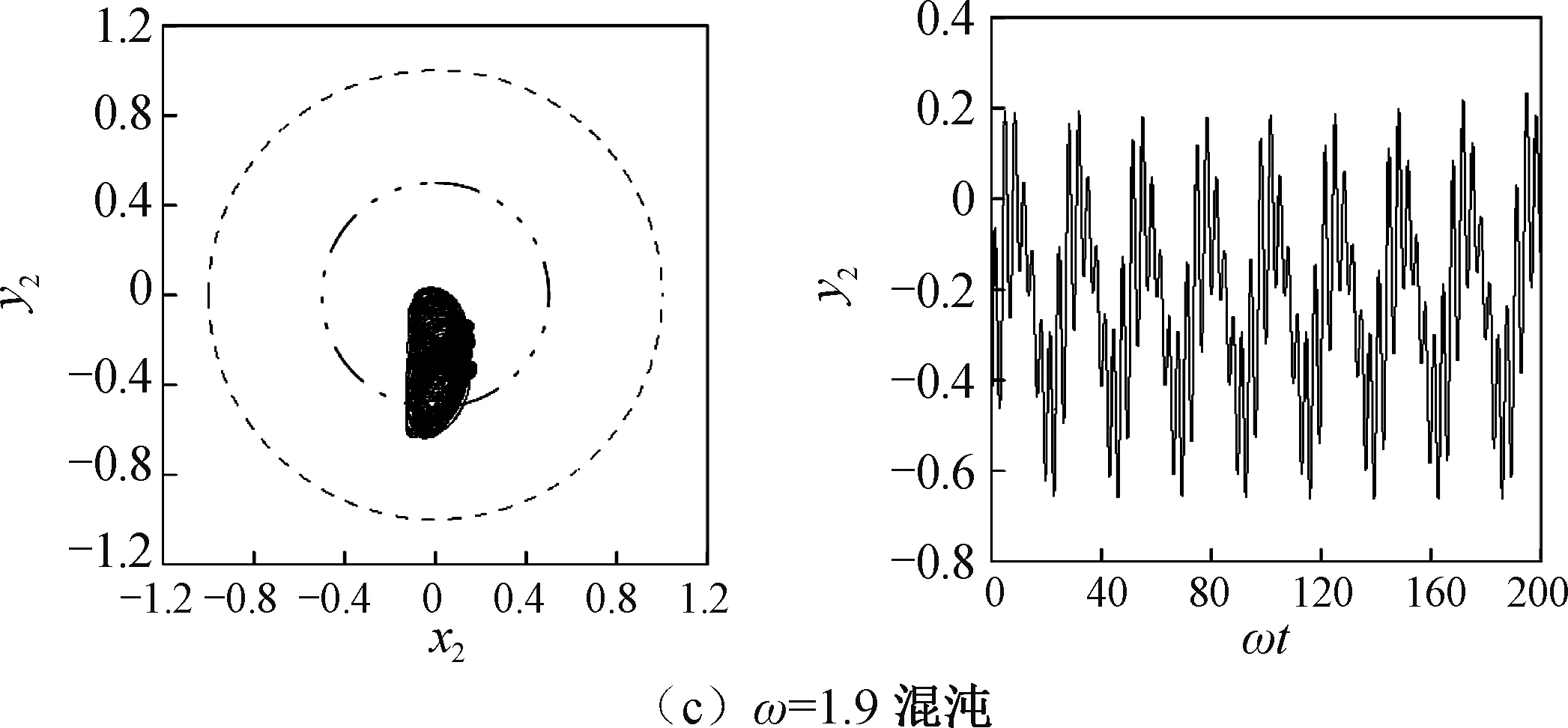
图7 碰摩转子不同转速对应的轴心轨迹图、Poincaré截面图、时间历程图
2.3 碰摩刚度对转子系统动力学响应的影响
进一步研究碰摩刚度对转子系统动力学响应的影响,分别取碰摩刚度为kc=0.5×ks和kc=3ks,得到系统在变转速条件下对应的分岔图、最大碰摩力分布图和占空比分布图,如图8和图9,同时结合图6(kc=ks)进行对比分析。整体观察图6、图8和图9,可看出在转速ω<0.23时系统的动力学响应一致,说明此参数域内不受碰摩力的影响,原因是系统转速小,轴颈径向位移小,未产生碰摩作用;其次可见,碰摩刚度越大,系统的混沌区域分布及幅值越大,对应的最大碰摩力幅值正相关增加。图8为碰摩刚度kc=0.5×ks,此时对应的碰摩力幅值明显更小,说明此时碰摩力对系统的影响较小,系统随转速变化的响应分岔图跟无碰摩故障时的响应分岔图接近一致。随着碰摩刚度的持续增加,系统在ω∈(0.51~0.67)参数域内的周期2运动逐渐演化为混沌和复杂的多周期运动,ω∈(0.67~1.75)参数域的周期1运动逐渐演化为复杂的多周期运动和拟周期,同时ω∈(1.75~2.0)参数域的拟周期演化为混沌,并且分布域增加。

图8 碰摩刚度kc=0.5×ks时转子系统分岔图、最大碰摩力分布图、占空比分布图

图9 碰摩刚度kc=3ks时转子系统分岔图、最大碰摩力分布图、占空比分布图
2.4 定转速下碰摩刚度变化对系统动力学的影响
为了进一步阐述碰摩刚度变化对转子系统动力学的影响,图10给出了转速为ω=0.55时,系统响应随碰摩刚度变化轴颈处的分岔图和最大碰摩力分布图。
观察图10(a)可见,当碰摩刚度较小时,系统为周期2运动和周期4运动,当碰摩刚度不断增加后,系统逐渐失稳进入混沌,混沌区域对应的幅值急剧增大,同时图10(b)清晰的反映了最大碰摩力随着碰摩刚度的增大持续增加,当kc>1.4×ks时,系统失稳进入混沌区域,对应的最大碰摩力幅值剧烈变化,此时转轴与辅助轴承产生了很大的碰摩冲击作用,不利于转子系统的平稳运行。因此,在转子的实际设计中,应尽量选用刚度较小的柔性辅助轴承,从而提高系统的稳定性。
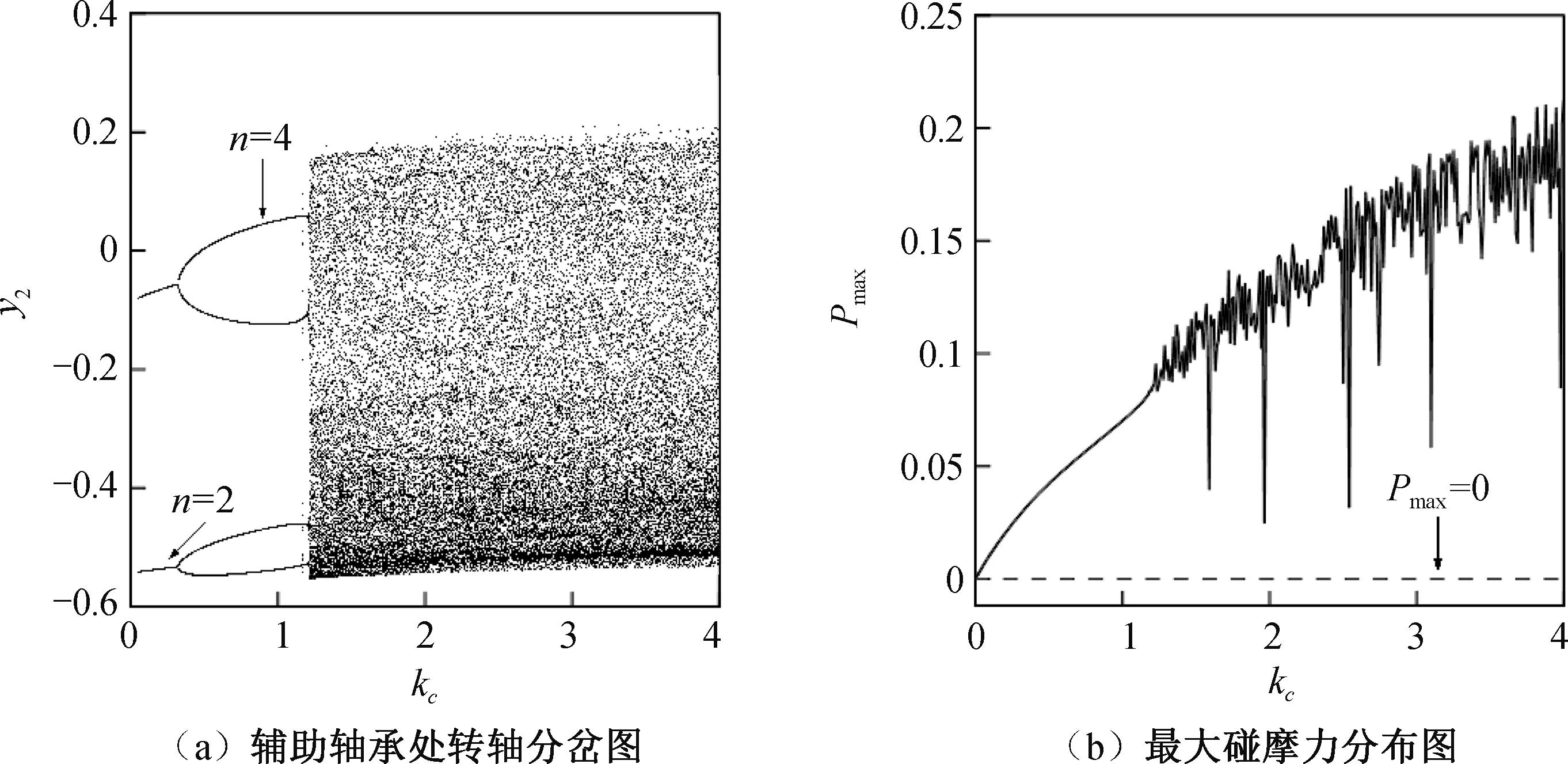
图10 ω=0.55转子系统分岔图、最大碰摩力分布图
3 结论
本文主要以含辅助轴承碰摩的磁支撑-转子系统为研究对象,综合考虑了电磁涡动、轴颈与辅助轴承的碰摩力、转盘偏心量等强非线性量相互耦合的影响,通过分析参数改变得出转子系统的一系列响应图,对该类故障转子得出以下结论:
1)系统在电磁涡动、转轴与辅助轴承碰摩的作用下产生了复杂的动力学行为,主要有周期运动、拟周期运动和混沌。
2)转速较低时,碰摩故障转子由于径向位移小,未发生碰摩作用,此时系统的响应与无碰摩故障的转子响应一致;随着转速的持续增加,由于碰摩冲击的不断加剧,系统产生复杂的多周期运动和混沌区域。
3)碰摩刚度较小时,由于对应的碰摩力也小,系统发生碰摩时对系统响应的影响不明显,随着碰摩刚度的不断增大,碰摩力持续增加,发生碰摩区域演化出复杂的多周期运动和混沌区域;因此,在此类转子设计中辅助轴承应选择较小的碰摩刚度,降低碰摩力对系统的影响,提高系统的稳定性。