“雪龙”号科考综合管理系统的设计和应用
2022-04-24夏寅月陈清满朱兵陈际雨
夏寅月 陈清满 朱兵 陈际雨
(1 中国极地研究中心,上海 200136;2 自然资源部海洋环境探测技术与应用重点实验室,广东 广州 510300)
0 引言
科学考察船是获取海洋探测数据的重要基础平台,其运营管理水平对科学考察的执行效率具有显著影响。先进的船舶性能是基本的先决条件,完善的科考设备是获取精准海洋科考数据资料的关键技术支撑,规范的船舶管理是有效运行的有力保障,技术队伍是获取科学、准确调查资料的关键[1]。
自1994 年首次执行中国极地考察任务以来,“雪龙”号科考船(以下简称“雪龙”号)共承担了23 次中国南极科学考察和9 次中国北极科学考察,在保障长城站、中山站、昆仑站和罗斯海新站后勤和能力建设的同时,还承担了重点海域的科学调查任务[2]。由于受南北极多变的气候条件、局部的海冰覆盖等因素影响,在进行综合海洋科学调查时,大多面临时间紧任务量大的困难。如何利用有限作业窗口期,快速高效地完成既定的科学考察任务,需要合理的航线和站点规划,多学科科考作业统筹考虑,充分利用站前与站后的低速航行期完成磁力观测、微塑料取样、磷虾取样等走航拖曳作业。合理制定综合海洋调查作业顺序、统筹航次考察作业内容成为了确保完成考察任务的关键。
开发一套适用于极地考察现场作业的综合管理系统,统筹航次调查作业进程,安全规范管理考察作业项目,并实时显示专业调查作业需要的信息,实现信息共享,利用现代化手段管理科考作业十分必要。南北极海域有着区别于中低纬度大洋的特殊环境,具有气温低、气旋多、海冰覆盖的特点,“雪龙”号的作业模式不同于一般考察船。实验室管理人员整理了科考作业实际需求,开发了一套科考综合管理系统。该系统统筹了各学科海洋作业的需求,结合站点分布特点,合理规划航线及作业顺序,节约了作业时间,提高了作业效率和燃油经济效率,一定程度上保障了作业安全。在系统开发应用之前,驾驶台与舯部、艉部作业组的沟通,需通过电话或对讲机等工具,且只有作业组长配备了相应的通讯工具,而在系统应用之后,每个组员都可以在实验室实时掌握船舶动态和考察作业进展,作业的效率得到了较大的提高。
目前国内的主流科学考察船基本上配备了科考综合管理系统(表1),但各船的系统差别较大。有的船舶科考综合管理系统开发较早,为2000 年左右,基于当时的技术手段,系统侧重于现场数据和样品登记表的管理,数据通过web 表单,手动形式录入,偏重于数据采集和管理,对站位调查作业模式未涉及;有的系统还未调试完成,尚未通过验收;有的船舶交付时间较晚,尚未执行考察任务,系统尚未投入使用。本文将重点介绍“雪龙”号科考船的科考综合管理系统的设计与应用,为未来更好地对科考船,尤其是极地科考船进行管理提供参考。
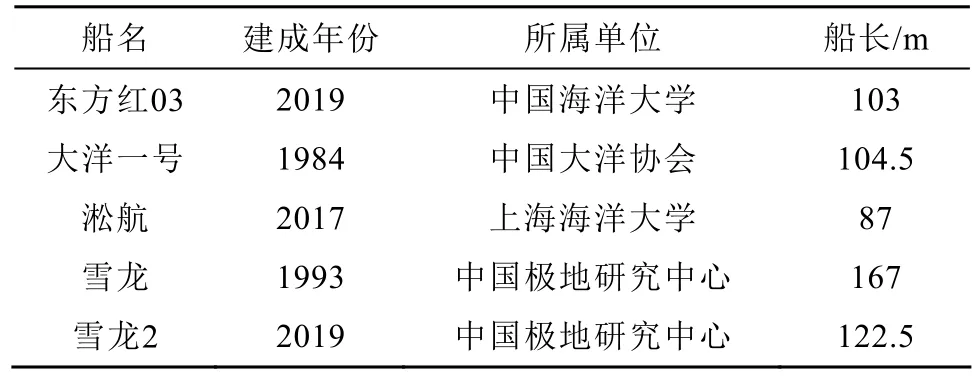
表1 国内主流考察船科考综合管理系统应用实例Table 1.Application examples of integrated management system for scientific observation in research vessels
1 “雪龙”号科考综合管理系统的设计思路
作为我国南北极考察的重要力量,“雪龙”号自1994 年执行南极科学考察,先后参与建成了中国南极中山站、昆仑站和泰山站,目前正在建造的罗斯海新站的建设物资主要也由“雪龙”号运输。繁重的建设物资运输任务大大压缩了执行科学考察任务的时间。此外,历次南极考察总要预留一定的时间用于科考综合调查作业,但严酷的自然环境、多变的气候条件、严重的海冰覆盖,都使得开展南极调查作业困难重重。留给科考作业的时间窗口经常只有短短的几天或者几个小时,船舶必须在规定的时间内赶往下一个作业站点。利用有限的时间,开展更多的综合调查作业,取得宝贵的数据和珍贵的样品,显得非常重要,必须通过科考综合管理系统才能实现。该系统的主要功能为合理规划航线和安排作业时间,保障科考任务顺利完成的同时提高考察作业的安全程度。系统主要结构分为三个部分,分别是电子海图和科考站位管理系统、科考设备显示屏幕共享系统和科考作业视频监控系统,如图1 所示。
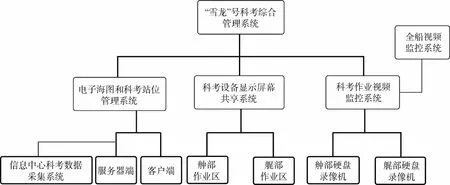
图1 “雪龙”号科考综合管理系统图Fig.1.Diagram of integrated management system for scientific observation in R/V Xuelong
1.1 电子海图和科考站位管理系统
电子海图和科考站位管理系统用于在电子海图上显示实时船位、航向、航速信息、计划作业站点位置信息,以及每个站点的科考任务。同时根据气象云图与海冰图的对比,提前了解站点位置的海冰覆盖情况,设计到达站点后拟开展的作业内容和顺序,结合相应航线的规划及航行时间、科考作业时间的预估,通过计算将上述内容直观地在电子海图上显示出来。通过直观的电子海图显示,便于管理科考作业进程,并为完成宏观考察任务提供保障。
1.2 科考设备显示屏幕共享系统
科考设备显示屏幕共享系统将科考仪器获取的数据和图像的显示页面实时共享至各实验室的大屏幕上,为开展各项科考作业提供科学参考。如:开展磷虾拖网作业的同时,实时掌握科学渔探仪探测到的数据信息,针对性地控制拖网作业深度,对提高采样成功率非常关键;开展地球物理作业的同时,实时查看深水多波束获取的水深信息,综合分析海底地形信息,调整地球物理仪器参数等。
1.3 科考作业视频监控系统
科考作业视频监控系统实时显示科考作业现场状况,首先有利于规范管理科考作业现场秩序,监督作业人员安全装备的穿戴,其次有利于观察作业现场设备仪器准备情况以及人员就位情况,再者还可以通过对作业现场情况的查看来预估作业完成时间,为下一项作业提供准备时间。通过一系列的综合立体管理方法整体规划布局科考作业活动,极大地提高了作业效率。
2 电子海图和科考站位管理系统功能设计、应用和实践
在以往的航次调查中,“雪龙”号开展调查作业任务时,由作业组将制定好的站位表格提交驾驶台,驾驶员根据站位表航行到指定站点后,通过电话或对讲机联系作业组组长,组长再依次通知作业组员,随后开展调查作业。作业人员不能直观查看船舶动态,只能被动接收指令,对即将开展的调查作业内容也较难及时掌握。基于这一现状,迫切需要设计一款针对极地考察作业现场的科考管理软件,用于综合管理科考作业。针对该情况,实验室管理人员总结以往考察的经验,针对性的提出站位作业需求,开发出了一套适合“雪龙”号考察作业模式的电子海图和科考站位管理系统。
作为一款服务科考作业的电子海图管理系统,不仅需要具有传统航海电子海图的功能,更需要服务科考调查作业。“雪龙”号在电子海图和科考站位管理系统中增加了科考数据接入、站位管理等功能,集成化后的电子海图管理系统使得科考作业效率大大提高,规范了管理的同时也提高了考察的安全性。
2.1 电子海图和科考站位管理系统主界面
自1986 年起,人们开始在电子海图上进行航线设计,借助定位仪在电子海图上实时显示船位、船速、航向等航行参数[3]。“雪龙”号电子海图和科考站位管理系统分两个部分,分别是科考数据采集服务器和客户端。基于船舶的科考数据采集服务器,电子海图管理系统通过实时的数据下载方式,来更新客户端海图数据信息,如:定位信息、罗经信息、气象信息、船舶主机工况等;客户端地图采用墨卡托投影方式,进行实时数据传输,不断更新相关信息的显示(图2)。

图2 电子海图和科考站位管理系统主界面Fig.2.Main interface of electronic chart display and information system
系统主界面主要由五个部分组成,即海图显示区、系统工具区、水平面板区、垂直面板区和状态栏。海图显示区用于显示海图和进行相关信息叠加,是图形化信息展示区;系统工具区是进行功能选择的区域,可进行海图区域放大、缩小等功能;水平面板区是显示海图计算、航线设计、海图标绘、天气预报、站位管理和航迹回放等功能的交互界面;垂直面板区显示内容主要为各科考设备的实时数据;状态栏显示当前所在位置的经纬度、当前显示比例尺、当前操作说明等。界面简洁大方,重要信息一目了然,方便实时查看船位信息、了解船舶动态、记录相关数据等。
系统中可以通过海图选择设置,选择不同的符号库,显示不同的海图相关信息,如等深线、参考水深、相关国家专属经济区等,通过等深线、专属经济区的综合显示,便于实时观察船舶动态,提前规划航线(图3)。
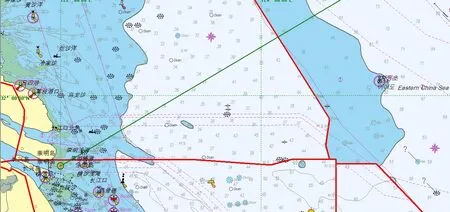
图3 标准电子海图效果Fig.3.Standard electronic chart effect
2.2 海图计算
海图计算作为电子海图的一项重要功能,主要用于测量海图上任意两点间的距离和相对方位,同时还可以测量任意点与某条船舶的距离以及与该船航向的相对方位(图4)。通过测量两点间距离和船舶航速可以估算所需的航行时间,计算预计到达时间。所有计算的里程数据均可选择三种单位进行显示,包括海里、千米和米。本系统不仅能测量两点之间的距离,还能通过连续选择测量点实时显示分段和合计距离。

图4 海图计算示例Fig.4.An example of chart calculation
2.3 航线管理
船舶航行前首先要设计好船舶航行的路线,制定计划航线,并计划船舶在每段航线上的航速和该航线上的安全宽度,以及到达每个转向点(如港口)时预计到达的时间等各类数据。通过船舶航行时的位置报告显示,可随时观测船舶航行情况,实现对船舶的实时监控。
选择航线设计工具,系统即进入航线设计状态。在航线设计状态下,将显示航线设计的浮动界面(图5)。通过该界面中提供的功能,实现对航线的设计。切换到其他工具时,将退出航线设计状态。
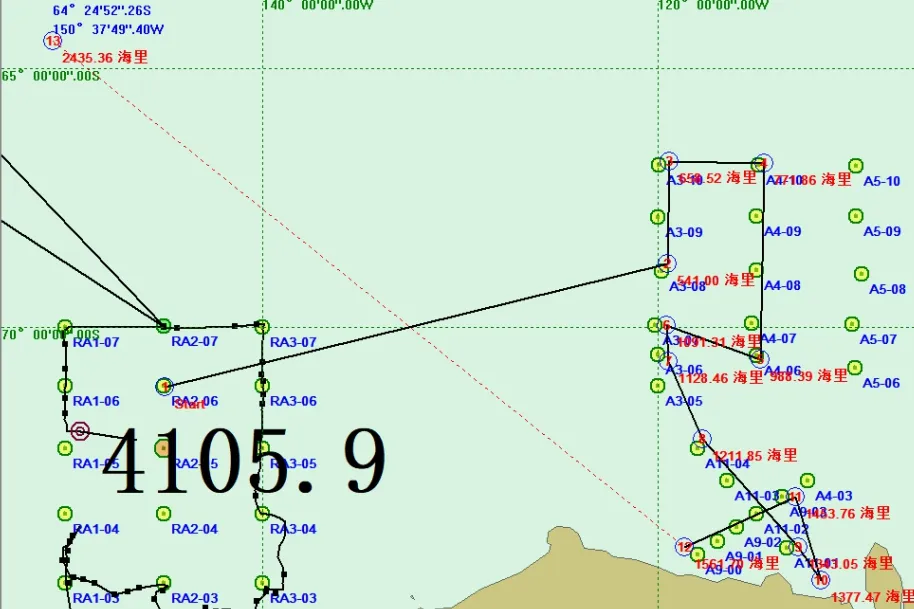
图5 航线设计浮动界面Fig.5.Floating interface of route design
2.4 站位管理
特定海区的作业,通常是以站点的形式排布,到达指定站点后随即开展综合调查作业项目,如:下放CTD 作业、分层采水、大体积原位过滤、浮游生物垂直拖网、箱式沉积采样、重力柱沉积采样、中层鱼类拖网、底栖生物拖网、湍流观测、多联生物网采样作业等。作业海区由于受海冰和气旋影响,可用于穿行的航道也一直处于变化中,相对准确的预测到达时间,排布到达后的作业顺序,预估作业需要的时间,计算作业完成时间,设定下一站点位置等综合信息的计算和显示能够更好地辅助科考作业的顺利完成。
站位管理是进行科考调查作业管理的主要功能,站位是指科考船舶在航行过程中需要执行科考任务的位置。在该位置船舶将停航,并进行一系列的科考活动。将站位计划导入到系统后,根据站位计划以及船舶航行动态信息,系统自动提示下一科考站位与当前船位的关系。当船舶即将到站前,进行声音和闪烁提示。当船舶到达站位后,及时记录当时的水深值,以及航行时间和实际到达站位时间等信息。站位管理界面如图6 所示,在海图显示区绘制各个站位的位置,查询各个站位的详细信息,同时可以调整站位计划,改变站位顺序,维护科考任务信息,调整各个站位需要执行的科考任务及先后顺序。

图6 站位管理界面功能说明Fig.6.Function description of station management interface
导入的站位信息将在海图显示区显示,显示内容包括站位位置以及站位之间的连线。如图7所示。
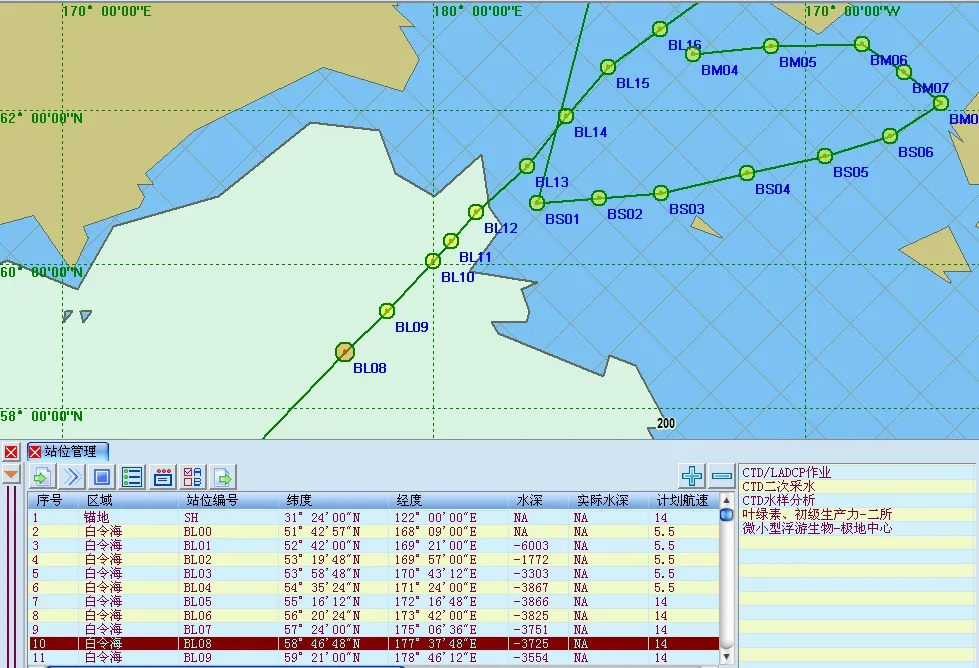
图7 站位显示Fig.7.Station display
例如,“雪龙”号在南极中山站开展第二次卸货作业期间(通常为大型车辆和极地油料运输)经常因为天气原因,不能开展作业艇运输任务,此时考察队会参照科考综合管理系统里根据作业站点内容规划的任务,计算出航行时间和作业时间,决定开展中山站外围普里兹湾综合调查任务的具体安排。
2.5 科考数据采集和服务器存储
科考数据管理系统利用现代计算机和软件技术,整合现有的观测设备数据,实现了观测数据的自动化管理,有效降低观测系统的管理成本,同时为信息动态发布网站提供了更多的数据信息和资源[4]。科考数据采集和服务器存储功能是电子海图和科考站位管理系统的主要功能之一。通常由于海冰覆盖,气旋影响或者大冰山干扰等原因,实际作业站位与计划站位往往存在一定的距离偏差。当开始停船作业时,系统能实时记录实际站位的数据,包括位置、水深、气温、湿度、风速、风向、海表温度、盐度、叶绿素、溶解氧等相关信息。在完成调查任务后,可通过数据表导出的形式将站位信息完整导出,便于后期进行数据处理。
3 科考设备显示屏幕共享系统
船舶的科考实验室配备大量的科考观测设备。通常情况下,科考设备的软件操作和数据界面显示在与其直接连接的计算机屏幕上,而开展海洋调查的作业区,分布在船舶的不同区域。如何在作业的同时,实时观察设备测量界面,对于高效精准地开展综合调查作业尤为关键。
3.1 科考设备显示屏幕共享系统设计
“雪龙”号为船龄接近30 年的老船,设计之初为北冰洋远洋运输船,自1994 年首次开展我国极地考察至今经过多次改造工程。2007 年船舶生活区改造的同时,在船舶的舯部和艉部甲板位置设计了多个科考实验室、科考设备区和调查作业区。通过多次改造工程,先后安装了万米测深仪、科学鱼探仪、深水多波束系统、声学多普勒海流计等调查设备。由于实验室的设计和调查设备的安装分别处于不同时间的改造工程里,较难做到整体规划,所以各个科考设备相对独立运行。
目前国内外先进的科学考察船都配备有船用计算机网络,并以此为平台将通讯、导航、数据采集、重点部位监控、船舶信息管理等集成为一个综合的船舶计算机网络信息集成系统,用于提高整个船舶的现代化管理水平[5]。“雪龙”号的船舶局域网相对成熟,已基本做到全船覆盖。网络信号将所需的视频信号通过局域网广播的形式发布,并在所需位置通过视频解码的形式显示,解决了屏幕共享的难题。科考设备显示屏幕共享系统将现有设备连成一个整体,通过矩阵控制软件将设备显示界面扩展发布到所需显示的作业区。同时针对“雪龙”号作业区的分布特点,设计了舯部和艉部作业区科考大屏共享系统,解决了作业现场无法观测调查设备运行情况的问题,系统图如图8 所示。

图8 科考设备显示屏幕共享系统图Fig.8.Large screen sharing system diagram
3.2 科考设备显示屏幕共享系统的实现
“雪龙”号利用视频矩阵控制器,将需要的视频信号同步采集,再通过视频编码器将视频信号发布出去。在需要读取视频信号的舯部实验室三个科考大屏幕和艉部实验室两块科考大屏幕位置安装视频解码器,通过解码显示到对应的科考大屏幕上。通过调节视频矩阵控制器,可以按照需求选择在科考大屏幕上的投放界面,调查作业人员可在作业区实时观察相关科考设备观测界面。对于个别需要实时操作的设备,可借助网络软件临时操作,最大化满足科考作业现场需求。
信息智能化建设的主要目标是实现数字智能化作业,而建设目标实现的核心是保持系统的先进性[6]。本系统的硬件设备选用,考虑到了信息技术的快速发展,在保证信息系统建设完成后,可根据信息化发展需求,增加其他扩展接口。通过视频矩阵控制软件,可以在不同作业区显示需要的屏幕内容(图9)。通过实时的界面观测,考察队员可以做到相对精准地释放采样器,提高采样成功率。通过数据对比,自从大屏幕共享系统运行后,中国水产科学研究院东海水产研究所开展的磷虾拖网作业采样成功率得到了较大提高。
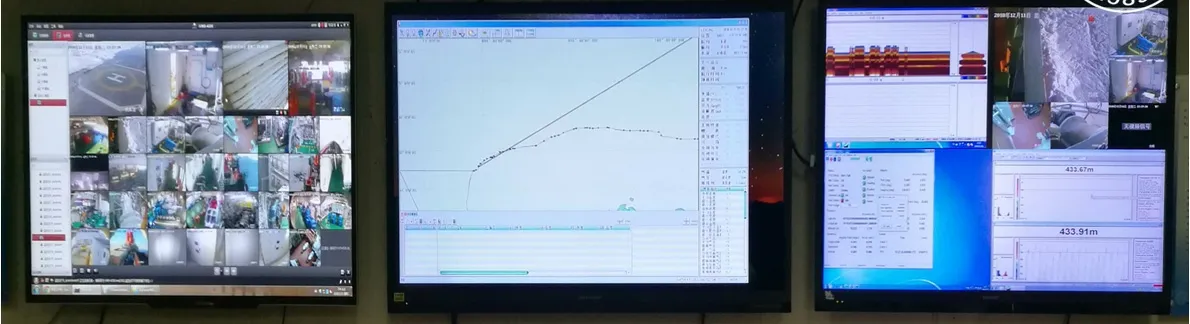
图9 舯部科考大屏幕Fig.9.The big screen of scientific research in the middle of the vessel
4 科考作业视频监控系统
“雪龙”号作业区分为不同部分,分别有CTD 绞车间、CTD 采样间、实验室区、右舷作业区、艉部作业区、表层海水采样间等;不同的作业区有着不同的功能。监控系统由摄像、传输、控制、显示和记录登记5 大部分组成。摄像机通过同轴视频电缆、网线、光纤将视频图像传输到控制主机,控制主机再将视频信号分配到各监视器及录像设备,同时可将需要传输的语音信号同步录入到录像机内。通过控制主机,操作人员可发出指令,对云台进行控制以及对镜头进行调焦变倍的操作,并可通过控制主机实现在多路摄像机和云台之间的切换。利用特殊的录像处理模式,可对图像进行录入、回放、处理等操作,使录像效果达到最佳。通过视频监控系统的建立,可以实时观察作业区的作业状态、作业人员的安全装备穿着情况和监控仪器的准备情况,便于观察整个作业现场,了解实时作业进程;监督现场作业人员安全规范穿着和调查作业规范执行情况。通过视频服务器,硬盘录像机等设备,可以保存超过一个月时间的监控画面内容(图10)。

图10 科考作业视频监控系统界面Fig.10.CCTV monitoring of scientific observation working site
随着船舶网络信息化的不断发展,通过位于“雪龙”号数据中心的通讯服务器,可以定期将部分现场画面传输回国内,使得国内关心极地科考作业的广大人民群众能直观了解现场作业场景,感受极地考察作业现场环境。
5 结论
南北极考察具有时间紧、任务重、作业时间窗口短、作业学科多、科考设备多等特点。“雪龙”号作为一条接近30 年船龄的老船,目前仍旧在科考作业最前线继续服役。学习先进科技,与时俱进,更好地服务科学考察,是每一代极地考察工作者不断追求的动力。通过设计和应用科考综合管理系统,提高了科考作业的效率,拓展了科考支撑的能力。
例如,在中国第32 次南极科学考察中,通过该系统合理规划站位作业,在开展调查作业中发挥了重要作用,考察站位完成数量创下历年考察之最。在极地专项执行期间,在南极重点海域开展的多学科综合考察和研究取得了一系列成果[7]。本文阐述的科考综合管理系统在其中起到了重要作用。
在近几次的南北极科考作业期间,“雪龙”号实验室管理人员在对参加航次的考察队员调查中发现,科考综合管理系统可以很好地满足调查作业需求,总体满意度较高。实验室管理人员在作业中同时收集系统应用中存在的问题,不断完善整个系统的运作,提高作业效率。正是由于该系统在“雪龙”号的经验积累和成功应用,自主建造“雪龙2”号时,在该系统基础上进行了进一步改进和完善。例如,在“雪龙2”号的海图系统中增加了冰图数据覆盖功能,能够更加直观的实现数据对比。通过不断的经验积累和系统完善,在不断提高考察船的硬件能力的同时,发掘探索更科学的管理办法,提高管理水平,服务我国的极地考察事业,同时也为类似船舶科考作业系统设计提供借鉴。
