“雪龙2”号表层海水多要素实时观测系统的设计与应用
2022-04-24陈清满夏寅月袁东方沈悦廖周鑫
陈清满 夏寅月 袁东方 沈悦 廖周鑫
(中国极地研究中心,上海 200136)
0 引言
对表层海水的物理、化学、生物、生态指标的观测是了解气候变化、人类活动对海洋生态系统影响的最基本资料,是分析预测海洋变化趋势的依据,是对海洋运动机理进行深入研究的重要数据支撑。长期以来,海水的物理、化学、生物、生态指标,如:pH、溶解氧、叶绿素、营养盐等,都是采用调查现场定点取样,然后进行实验室分析的方式获得的。该方法存在劳动强度高、取样点少、受现场环境影响大等缺点,难以满足现代化、大尺度、宽范围的海洋长期连续监测与调查的需求。
海洋科学研究的重大发现大多基于现场的长期观测,例如大洋环流的发现、中尺度涡现象、厄尔尼诺现象、海洋生物资源周期性变化、海洋环境演变等方面的重大科学发现都是建立在长期、大量、广泛的海洋现场观测数据基础上。若缺乏时间和空间上大尺度的数据积累,研究工作很难取得重大突破。随着科技的发展,特别是硬件设备加工制造技术的进步,海洋多要素实时观测系统越来越成熟,并逐渐得到广泛的应用。“雪龙2”号也通过对该系统的应用,实现了在航行期间的连续自动观测,完成了海表面多参数、多学科的调查测量工作。
海洋科学考察船通常承担多项调查研究任务,航行区域遍布全球各大洋,利用表层海水多要素实时观测系统获取大范围的海洋表层连续观测数据,已成为国际先进海洋考察船的常规监测手段,甚至在一些商船上也有了应用,成功获取了大尺度范围的海洋表层数据,并且也有了丰富的科研产出。例如:2008 年,瑞典Oden号破冰船从瑞典哥德堡驶往南极洲麦克默多站的过程中,发现表层海水中均含有六氯化苯(α-HCH、γ-HCH)、六氯苯(HCB)、硫丹、多氯联苯(PCB)等持久性有机污染物[1];我国利用“雪龙”号配备的表层海水走航观测系统,获取了连续的走航观测数据[2-3](图1),并成功绘制出横跨南北极大断面的海洋表层CO2分布情况。通过2008 年中国第3 次北极科学考察对加拿大海盆的观测,分析得出北极海冰融化可增加海洋对大气CO2的吸收,但很快就会达到平衡,揭示了海冰融化对北冰洋CO2的吸收能力提高低于原预期[4]。通过涵盖整个北大西洋的调查,揭示了浮游动物种群变动与环境之间的关系及其对渔业资源的影响等。
“雪龙2”号作为我国自主建造的第一艘现代化极地考察船,一经投入使用即成为我国极地考察的最重要力量,南极考察从上海港出发至南极洲,横跨太平洋、印度洋、南大洋;北极考察穿越东北航道进入北冰洋,具有航程长、航线稳定的特征,为海洋科学研究提供了一个长期、稳定的观测平台[5]。同时在“雪龙”号表层海水走航观测系统成功应用的基础上,结合极地研究的特殊需求,推进了系统集成、提升了连续观测的能力,进一步加强了现场的科考支撑保障能力。
1 “雪龙”号的经验
“雪龙”号极地考察船是中国第三代极地考察船,是由乌克兰赫尔松船厂在1993 年3 月完成建造的B1*级(1.5 节航速连续冲破1.2 m 厚的冰)破冰船,原设计为北冰洋运输船。中国购买后为满足我国极地考察的需求,分别于1994 年、2007 年和2013 年进行了三次大的改造任务,配备多套科考调查仪器和辅助设备。经过改造后的“雪龙”号各项科考功能逐渐趋于完善,在较长一段时间内“雪龙”号是我国唯一专门从事极地科考的考察船,为我国极地事业的发展做出了巨大贡献。其中,在2007 年的维修改造里,增配了表层海水走航观测系统。
“雪龙”号表层海水走航观测系统(图1)主要由前置温度传感器、观测主机、甲板单元和控制终端4 个部分组成,其中观测主体由一个容积约5 L 的水箱及内置温度、盐度、叶绿素、有色溶解有机物(CDOM)传感器组成(包含SBE21 温度传感器、SBE38 外置温度传感器、WETLAB Wet star叶绿素传感器和CDOM 传感器)。前置温度传感器安装于船舶取水口位置,观测主机安装于距离取水口管路约10 m 的位置,甲板单元和控制终端与观测主机安装于同一舱室。船舶航行时,实时采集的表层海水经过前置温度传感器后,经管路输送至观测主机,经观测主机测试分析后排放至泄放口。
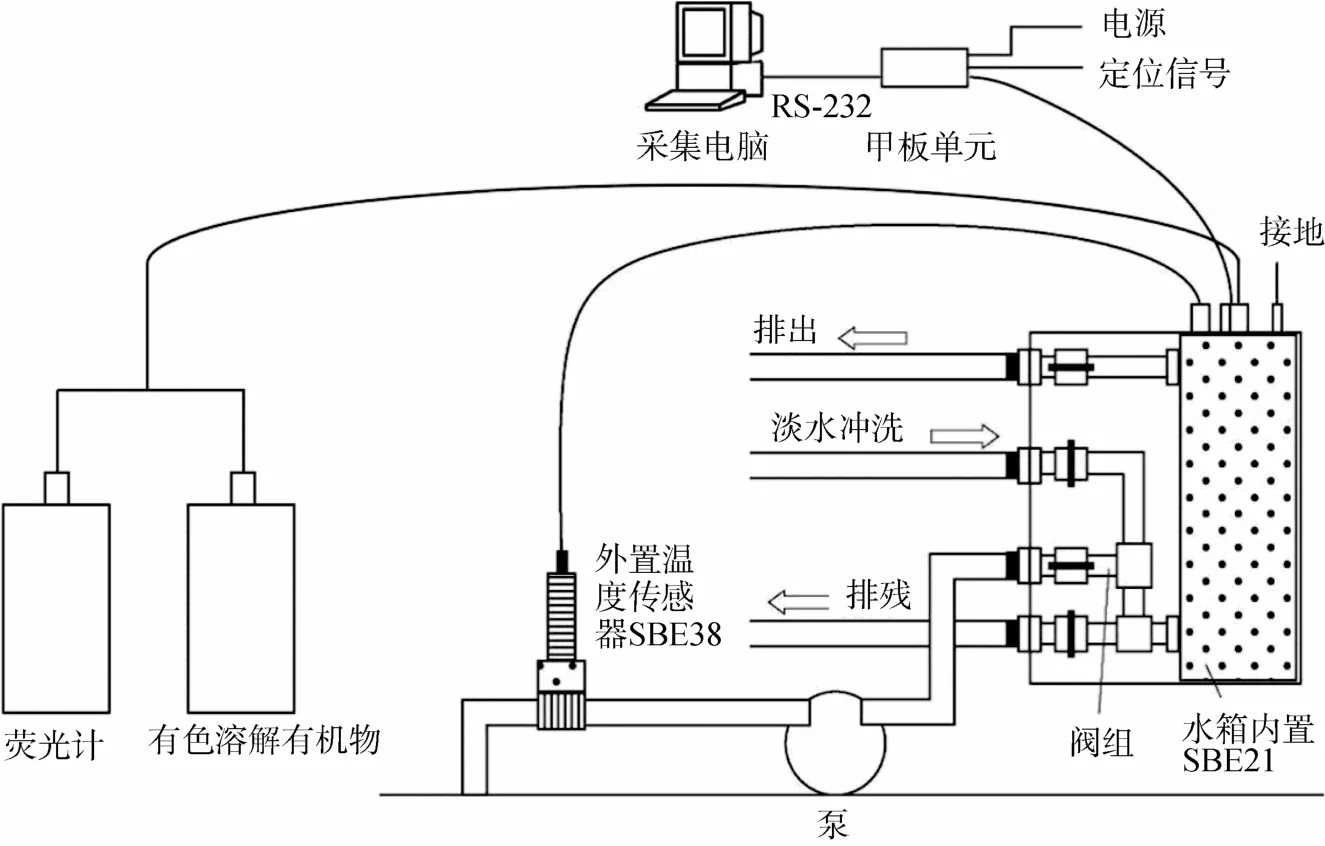
图1 “雪龙”号表层海水走航观测系统Fig.1.Navigation observation system for surface water multi factor measurement of R/V Xuelong
“雪龙”号表层海水走航观测系统虽然观测的参数较少,但经过几次系统升级,各项功能已经趋于完善,且运行稳定可靠。经十多个南、北极航次的使用检验,获取了大量的宝贵数据。自然资源部海洋大气化学与全球变化重点实验室团队依托该系统,取得了北冰洋海洋酸化与碳循环关系等重要科研成果[6-7]。该团队通过获取的观测数据,描绘出横跨南北极的海洋表层CO2的分布情况。依托中国第三次北极科学考察期间(2008年)对加拿大海盆表层海水观测数据的采集,揭示了水体对空气中CO2吸收与北极海冰融化之间的关系,得出海冰消融并非如预期可以强烈增加北冰洋CO2吸收的结论。另外,该团队还集成了中国北极考察多个航次数据及相关国际数据,研究了西北冰洋1994—2017 年夏季CO2分压的变化情况,得出了海冰消失放大了西北冰洋夏季年代际二氧化碳增加的结论[8]。由于该系统在“雪龙”号的成功使用也积累了大量冰区运行经验,为“雪龙2”号表层海水观测系统的设计提供了重要技术积累。
2 “雪龙2”号系统设计需求与结构
作为海洋环境研究的一部分,极地海洋化学参数的测量是全球海洋化学研究系统的重要组成部分,对于全球碳循环、温室效应等科学研究有着非常重要的意义。在以往航次中,依托“雪龙”号的表层海水采集系统提供的基础数据和水样,科考队员会自带二氧化碳、甲烷、营养盐、pH 等检测仪器,在船舶航行过程中对表层海水进行相关参数观测。“雪龙2”号作为我国自主设计建造的新一代现代化极地考察船,在建造之初,便对科学调查功能的提升设计非常重视。通过一套高度集成的观测系统,可一次性完成海水温度、盐度、溶解氧、叶绿素、浊度、有色溶解有机物、pH、营养盐(铵盐、磷酸盐、硅酸盐、硝酸盐和亚硝酸盐)、CO2、CH4以及空气中的CO2和CH4等的实时连续观测,各分析模块具体型号如表1 所示。所有观测数据在统一的平台实时显示,便于现场监测与分析,并且具备远程监控功能。通过专业软件操作,可实现历史观测数据曲线的自动生成、更新、记录和报表打印等。为了尽可能减少人工的干涉和维护,系统需配备自动清洁防腐蚀的预过滤功能并能够定时进行内部自主清洁。由于船舶在破冰工况下会产生剧烈的震动,系统需对管路、接口、底座等部位进行特殊处理,配备较强的防震措施。

表1 “雪龙2”号相关传感器列表Table 1.List of relevant sensors of R/V Xuelong 2
“雪龙2”号表层海水多要素实时采集系统(图2)进气箱安装于船顶罗经甲板,其余部件均安装于两个标准机柜(W600 mm×D600 mm×H1800 mm)内,系统主体安装于面积约2.5 m2的科考设备间内。机柜1 主要包含不间断电源、传感器供电接线盒、粗过滤器、除泡器、供水及分流系统、带触摸屏的数据采集系统、温盐等传感器、水–气二氧化碳和甲烷测量系统;机柜2 主要包含营养盐检测系统和自动清洁系统。进入系统的海水先后经过粗过滤器,除泡器,溶解氧、叶绿素、浊度和有色溶解有机物传感器,二氧化碳和甲烷探测仪,pH、温盐传感器和营养盐自动分析仪后排出舷外或废液桶内(图3)。

图2 “雪龙2”号表层海水多要素实时采集系统Fig.2.Real time acquisition system for surface seawater multi factor measurement of R/V Xuelong 2
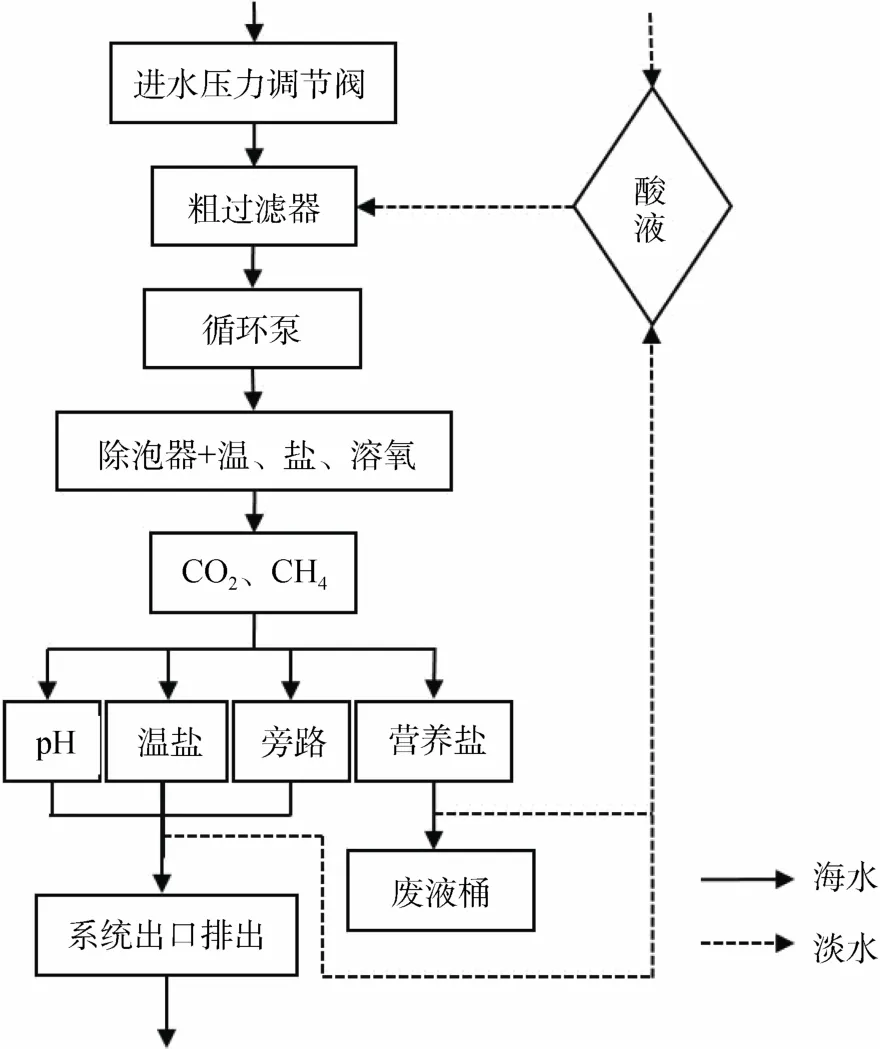
图3 “雪龙2”号表层海水多要素实时采集系统流程图Fig.3.Flow chart of multi factor real time acquisition system for R/V Xuelong 2 surface water observation
3 “雪龙2”号设计技术难点分析
3.1 数据质量精度需求
表层海水多要素实时采集系统首先要保证数据的精确性,可能影响其准确性的因素有以下几个方面。
(1)营养盐的测定周期较长,且各项营养盐的测定周期不同。不同时段的进样会导致各参数在测定时间轴上无法匹配,影响数据时间上的同步[9]。
(2)系统内部管路、监测池和传感器表面,如遇长时间海水停滞,会被藻类、藤壶等生物生长繁殖所覆盖,影响数据测量质量。
(3)海水样品采集系统(为本系统提供海水)运行的稳定性、可靠性和纯净度对表层海水多要素实时采集系统的正常运行很重要,只有持续不间断的观测才能保证数据的延续性,泵和管路的材质需确保对样品无污染。
“雪龙2”号表层海水多要素实时采集系统采用转子水泵,具有结构简单、零部件少、运行安全可靠的特点[10];泵腔与齿轮箱中间设置了隔离腔,用于防止齿轮油对管路及海水样品造成污染;转子为不锈钢加橡胶材质,不会破坏水体中的微生物、藻类等。系统可以定期进行管路和传感器自清洁维护,确保无藻类繁殖、无沉积物积累和无附着生物生长,提高检测数据精度。为了对营养盐进行准确的分析检测,系统中专门设置了蓄水池,3 台营养盐分析仪同时从蓄水池内取样进行分析,蓄水池内海水样品更新周期大于最长检测项目的分析周期,待蓄水池内海水样品更新完成后,营养盐分析仪再进行下一个周期的分析检测。
3.2 高集成性需求
相较于“雪龙”号表层海水采集系统,“雪龙2”号可实时观测的参数更多(表2)。系统设计的思路不是将若干仪器简单的堆砌,而是让每个仪器独立进行测量。表层海水多要素实时采集系统的设立初衷即在船舶航行时连续获取稳定、高质量的数据,通过高度的系统集成,将原本不同的仪器集成在一起,通过人机交互界面实现一体化操作。“雪龙2”号表层海水多要素实时采集系统主要从以下几个方面提升了系统的集成性能。
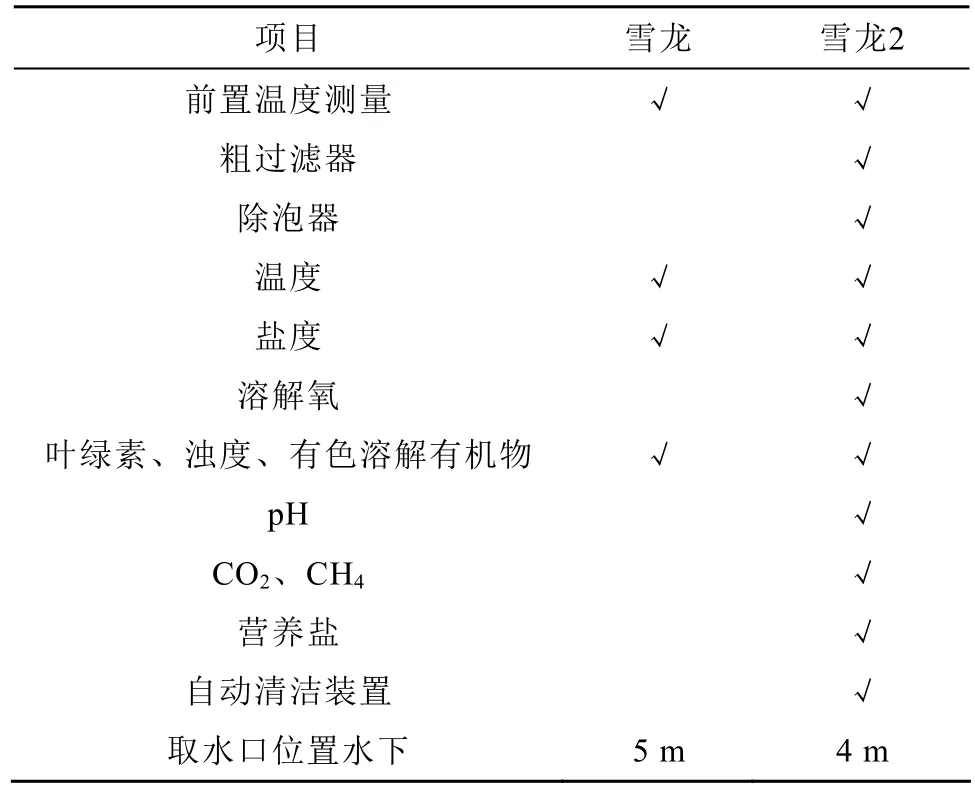
表2 “雪龙2”号与“雪龙”号表层海水连续观测系统对比Table 2.Comparison of similarities and differences between R/V Xuelong 2 and R/V Xuelong surface water continuous observation systems
系统所有设备均采用模块化设计,统一安装在标准的机柜内,从硬件结构上实现了系统集成性。集成紧凑的结构使得维护和维修的空间受限,通过将机柜每一层设置为活动抽屉式,在设备需要维护保养时,从机柜内将设备抽出即可进行。集成后做到了一键启动所有设备,按照设定的流程自动检测、记录数据。通过将供水系统的泵组运行信号接入,系统可以自主判别运行或停止。当系统检测到泵组停机时,会自动切换至停止状态,避免采集无用的数据。通过风速和风向的数据接入,在相对风速小于1.5 m·s–1或者船舶顺风航行时,系统会自动停止对空气中二氧化碳和甲烷的探测,调整为对水体中二氧化碳和甲烷的探测并利用标准气体完成探测校准,从而避免船舶烟囱废气排放对于采样数据的影响。
3.3 绝缘保温需求
表层海水的采集是实时从船舶海底门取水口泵入,为保证水体有较高置换效率,供水系统通常使用大功率海水泵配合大口径管路,再通过较细口径的支管进入表层海水连续观测系统,进入系统后分成更小口径的进样管进入各个测量系统。极地航行期间表层海水温度一般介于–2~0℃之间,而科考设备间的环境温度通常维持在24~26℃。表层海水由管路进入舱室后,海水温度易受环境温度影响而升高。温度的变化会影响很多参数的准确测量,例如海水温度升高会导致电导率测量值上升,溶解氧的测量值下降等。
因此海水由取水口管路进入到表层海水连续观测系统之前,采取了真空双壁管、包覆绝缘保温材料等有效措施降低环境温度的影响。由于表层海水多要素实时采集系统自身结构复杂,各传感器间均通过进样管串联,容易通过水管产生热交换,从而影响数据测量精度。所以在系统设计时所有的水管路均采用非金属材质,减少热量交换;对于粗过滤器、阀门、三通等通水金属件和无可视要求的管路,均包覆绝缘保温材料,隔绝与环境产生的热传导;通过优化传感器测量顺序,对检测池等做好保温绝缘。将对温度变化敏感的传感器前置,减少了与室温接触的时间,提升了传感器测量的精准度。
3.4 低维护特点
表层海水多要素实时采集系统的重要优势是航行时的连续不间断观测,高效获取大尺度的、长期的观测数据。高集成度、长期观测的特征,对系统易维护性提出更高的要求。“雪龙2”号年均在航时间长达260 多天,系统长时间运行,管道内逐渐会被细菌、真菌、藻类等海洋生物附着(图4),这样不仅会腐蚀、堵塞管道[11],而且会污染表层海水样品,影响数据质量。

图4 使用3 个月后未清洗的海水管路Fig.4.Uncleaned seawater pipeline after 3 months of use
“雪龙2”号表层海水多要素实时观测系统设计带有自动清洁功能,可根据航行海域特点,自主设置系统的自清洁。执行步骤如下:
(1)停止数据采集与记录;
(2)关闭系统海水进水压力调节阀门,向系统内注入淡水用以排除整个系统内原有海水;
(3)通过一个小型蠕动泵向管路中注入定量的草酸溶液;
(4)系统开启循环泵,进入内循环模式,混有草酸溶液的淡水在系统内充分混合、反应、冲洗,并循环至设定时间;
(5)开启海水进水压力调节阀门,注入海水;排出清洗液,系统开始下一个周期的数据采集与记录(图3 虚线所示循环)。
对于二氧化碳和甲烷的探测,本系统选用平板硅平衡器进行海水中二氧化碳和甲烷的平衡,采用激光的方式测量。短时间内完成对表层海水、水表空气中的二氧化碳和甲烷的测量,定时进行标准气体的测量自校准(表3)。系统自动化程度高,人工干预需求低。
本文用于行为识别的随机森林算法建立在基于Spark运行的分布式机器学习算法库MLlib上,所有的示例及算法程序均采用scala语言进行开发。进行人体行为识别建模时,首先要手动确定随机森林中几个重要参数:①numTrees:随机森林中决策树的个数,需要手动调试;②maxDepth:随机森林中决策树的深度,需要手动调试;③maxBins:可以将连续的特征离散化的最大分箱数,使用默认值32;④Impurity:节点分裂的方法,回归情况下使用方差,分类情况下使用信息熵或者基尼指数。
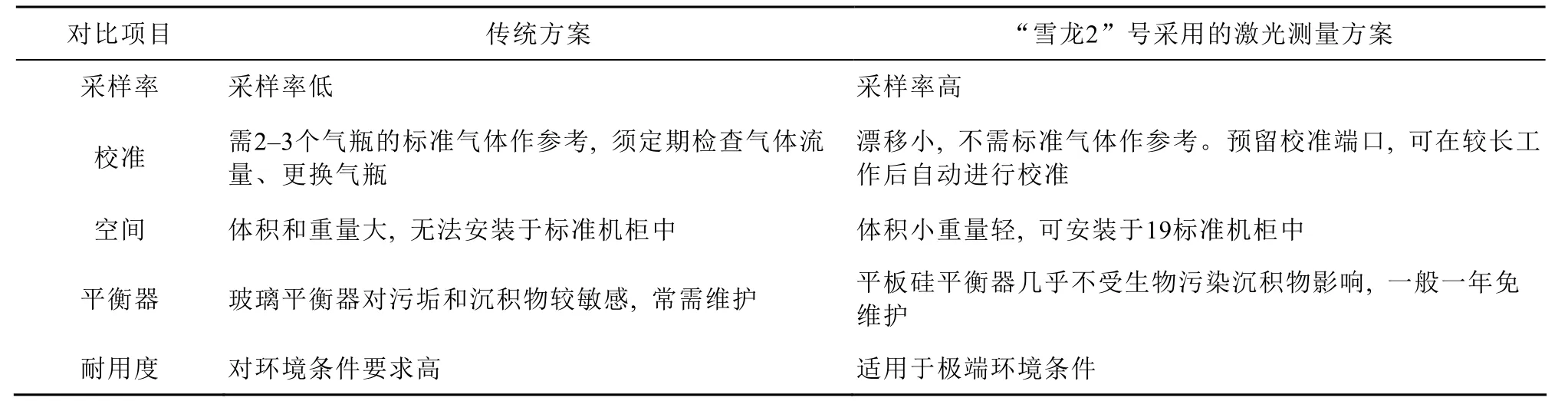
表3 二氧化碳和甲烷的探测方法对比Table 3.Comparison of methane and carbon dioxide detection methods
4 极地现场实际应用
4.1 现场应用情况介绍
“雪龙2”号表层海水多要素实时观测系统在中国第36 和37 次南极科学考察中得到充分应用检验。两次考察总历时378 天,航线遍布全球各大洋,并在极地高纬度地区完成了长距离航行,获取了宝贵的表层海水数据。航次中除经过他国专属经济区和停靠码头期间,其余时间表层海水多要素实时观测系统实现了系统无人值守全自动化运行,运行时间达8000 余小时。日常巡视中重点检查系统运行是否正常、是否有漏水漏电等;定期按照操作规范更换耗材,如:更换蠕动泵管路、添加营养盐检测试剂、纯水水箱注水等。
“雪龙2”号表层海水多要素实时观测系统经上述2 个航次的连续运行检测,系统整体运行稳定,故障率低,操作简单,数据精度高,实际使用情况总结有如下特征。
(1)系统能较好地应用于全球尺度范围,尤其极地冰区的表层海水的连续观测,在低密集度浮冰区系统连续运转无冰堵现象发生;
(2)系统保温绝缘良好,无明显冷凝水产生,前置温度传感器与机柜内温度传感器的测量值偏差小于0.3℃;
(3)数据准确度高,营养盐的测量数值与实验室内采用分光光度法测出的数值一致;
(4)人机界面友好,一键式操作,并可执行自动清洗消毒程序,无需安排专人值守。
4.2 积累经验和后续经验
(1)蠕动泵管须选择耐低温的材质,低温下仍能保持足够的柔软度及韧性,确保其功能正常;
(2)机柜中系统粗滤和除泡器位置设置透明检视窗口,便于日常巡查时查看设备状态;
(3)数据记录的时间标签需改进,在部分传感器的检测周期同步中,对于检测耗时较长的传感器,如营养盐等,检测结果应对应进样时间。
5 小结与展望
海洋表层海水的温度、盐度、溶解氧、叶绿素、pH 等参数是研究海–气界面、温室效应、海洋酸化等的最基本的资料,在长期观测的基础上,可对海洋现象变化趋势进行分析预测,对海洋过程机理的深入研究提供重要基础支撑。利用航行时连续观测相对于定点采样分析,具有数据连续性高、观测效率高、消耗人力物力资源少等特征,受到各国的广泛关注。“雪龙2”号表层海水多要素实时观测系统在“雪龙”号表层海水走航观测系统的基础上,结合国际前沿热点问题,通过提高数据准确性、系统集成性,提高系统自动化程度等方法,成功设计并实现了该系统的成功应用。经多个极地航次的应用检验,运行稳定可靠、观测数据准确、极大的减少人力物力,能较好地适用我国极地考察实际需求。该系统的成功应用,对于极地现场观测具有重要意义,将为我国极地科考提供重要科学考察支撑。
