环形旋转阵列式机载激光雷达研究及应用
2022-04-23杨涛涛


Research and Application of Annular Rotating Array Airborne Lidar
YANG Tao-tao
(Gansu Zhitong Technology Engineering Detection Consulting Co., Ltd., Lanzhou 730050, China)
【摘 要】现阶段,公路及铁路检测行业用于评定相关检测参数的统计点数较少,仅使用固定检测间隔或检测频率的数据作为评定依据,不能全面、系统地评定目标体连续的质量或形态。论文运用激光扫描测距系统LRF、卫星导航系统GNSS、高精度动态载体姿态测量系统IMU的基本原理,采用环向旋转阵列式激光发射方法,辅以纵向方位控制系统,搭载于无人机,构建全方位、全地形、连续且实时的数据检测处理系统。
【Abstract】At this stage, the number of points used to evaluate relevant detection parameters in highway and railway detection industry is relatively small. Only the data of fixed detection interval or detection frequency are used as the evaluation basis, which can not comprehensively and systematically evaluate the continuous quality or shape of the target. Using the basic principles of laser scanning ranging system (LRF), satellite navigation system (GNSS) and high-precision dynamic carrier attitude measurement system (IMU), this paper adopts the annular rotating array laser emission method, supplemented by the longitudinal azimuth control system, which is carried on the UAV to construct an omni-directional, all terrain, continuous and real-time data detection processing system.
【关键词】激光雷达;旋转阵列;激光测距;三维检测;公路检测
【Keywords】lidar; rotating array; laser ranging; 3D detection; highway detection
【中图分类号】P225.7 【文献标志码】A 【文章编号】1673-1069(2022)02-0194-03
1 引言
目前,国外已将机载激光雷达系统运用于日常地表环境的各项监测当中。美国国家生态观测网NEON使用的Airborne LiDAR就是运用机载激光雷达系统来扫描地物、植被等,对其数据进行科学研究,机载激光雷达技术在国外已大规模应用于数据采集。
与国外相比,国内在激光雷达技术方面经过几十年的不断研究、不断创新,激光雷达技术逐步实现了跨越式的发展。2007年,我国发射的“嫦娥一号”探测卫星搭载激光高度计,用以获取月球表面高度数据;2012年,北京遥测技术研究所突破各种技术难题,研制出领先世界各国的大气探测激光雷达系统。机载激光雷达技术作为一种新兴的对地观测技术,因其具有速度快、精度高、信息丰富等特点,为地表三维信息的快速获取提供了一种全新的技术手段,已广泛应用于国土资源调查、地形測量、林业、灾害评估等领域。
在隧道工程方面,目前主要的连续检测仪器有地质雷达、三维激光断面仪及全站仪等,可实现相关项目检测的连续性,但适用性不强。地质雷达检测中测线的布置有限,三维激光断面仪、全站仪实现的连续数据检测需耗费极大的社会资源。在连续检测方面,上述仪器只适用于直线特定检测区域的检测,不能用于带有曲线性质的检测,尤其在路线缓和曲线处或转折处,检测数据误差较大,不能真实反映具体点位的三维空间坐标位置,实用性不强。随着我国相关领域科学技术的飞跃式发展,亟待研制出一种可用于目标体三维连续检测的智能化数据采集、传输及处理系统。该系统以单点多通道二维平面精确检测,设计采取机载行进的方式,实现了从传统单点、单平面向多点、三维的检测方式跨越,实现了单次检测所有适用项目,可应用于隧道工程、桥梁工程、路面工程、交安绿化工程、边坡工程以及养护监测等。这对目前检测行业将是质的飞跃,创新出了一种独特的检测方式,彻底摆脱了传统检测的各种环境及地形限制,真正实现全领域检测适用性。
2 研究内容与方案
2.1 研究内容
环形旋转阵列式机载激光雷达检测一体化系统,是基于激光测距和激光雷达技术的融合技术,利用了激光测距原理,参考了激光雷达的阵列采集技术,自主设计环形旋转阵列式激光布置,创新出的一种集激光扫描测距系统LRF、卫星导航系统GNSS、高精度动态载体姿态测量系统IMU于一体的综合检测系统。
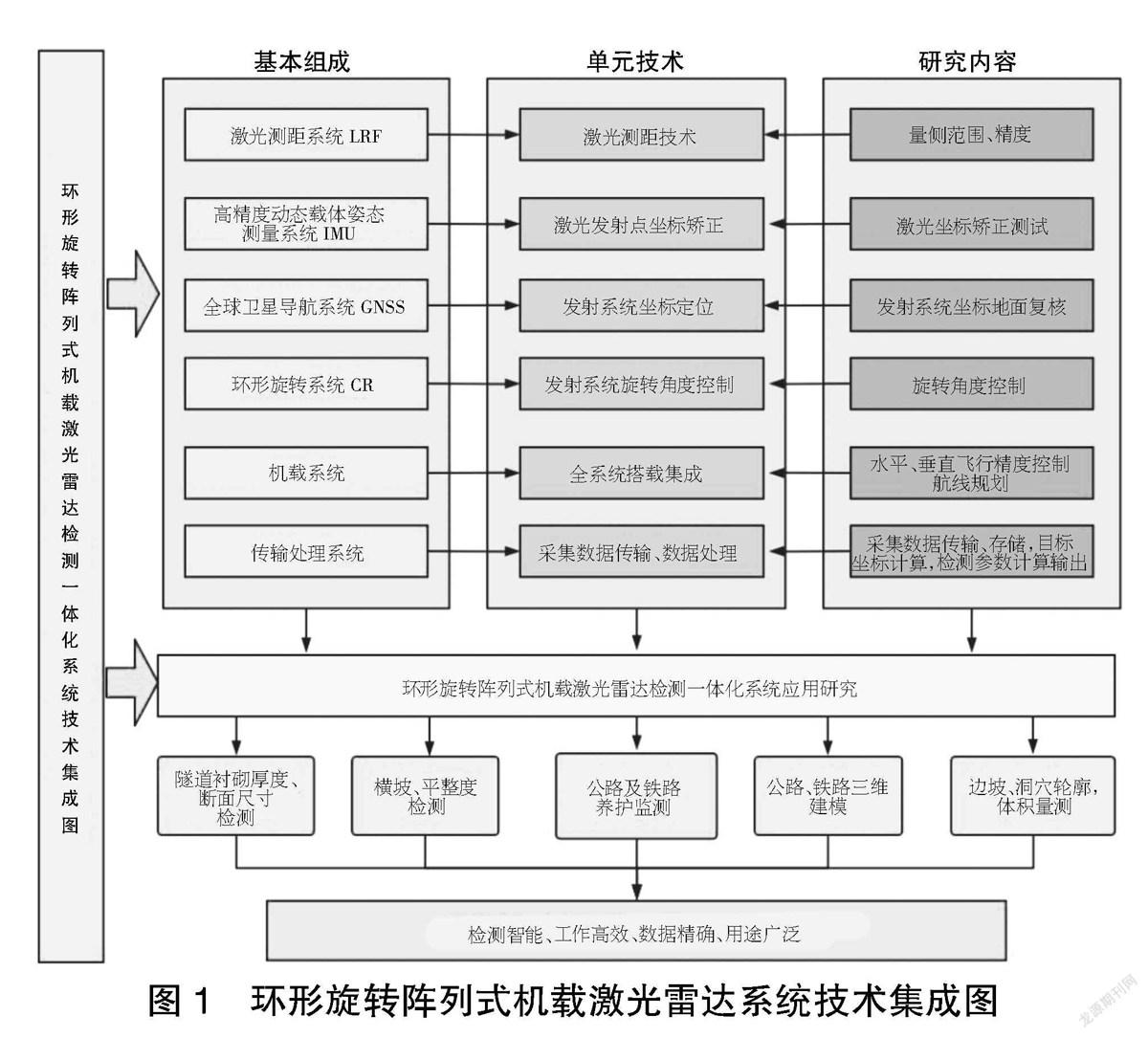
环形旋转阵列式机载激光雷达检测一体化系统是以激光测距为基础的测量系统,研究采用无人机对地面沿路线前进方向进行环向旋转扫描,记录被测点三维坐标、距离,生成连续、高精度的激光点阵三维数据,数据经处理后得到被测物的高程、厚度、轮廓信息,用以计算工程中各项检测参数,达到纵向、环向连续的三维检测数据(见图1)。
2.2 研究方案
2.2.1 系统组成及功能
系统主要由激光测距系统LRF(见图2)、卫星导航系统GNSS、高精度动态载体姿态测量系统IMU、环形旋转阵列系统CR(见图3)、机载系统以及传输处理系统组成。激光测距系统包括测距单元和控制单元,主要用于检测频率控制、距离测量;卫星导航系统与高精度动态载体姿态测量系统主要用于测定激光在空中的位置及机载系统的飞行姿态,用于坐标定位校正控制;环形旋转阵列系统主要用于控制激光测距系统的旋转角度;机载系统主要用于航点及航向规划;传输控制系统用于快速存储激光测距获取的各项原始数据。多套系统的有机结合有利于根据载具的位置反算出激光点阵的精确三维坐标。
2.2.2 系统工作原理
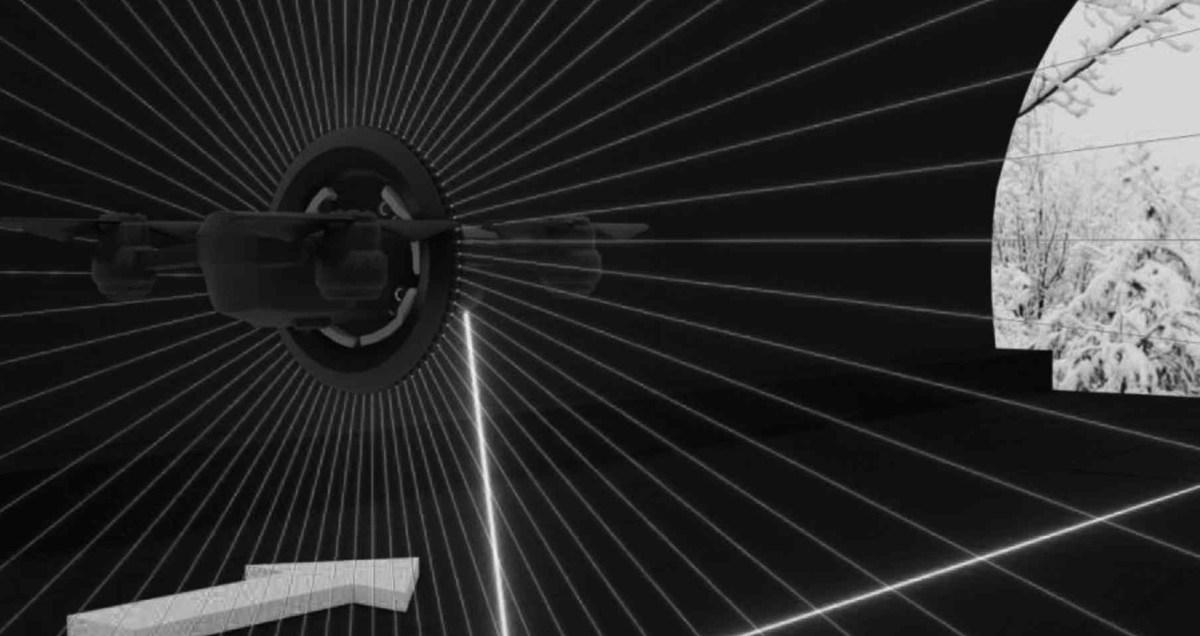
环形旋转阵列式机载激光雷达系统采用激光器作为发射单元,环形旋转阵列系统控制一定夹角的激光光束射向目标体,同时,记录激光发射时刻的发射坐标、发射角度等信息。GNSS系统、IMU系统安置在机载平台上,激光环形阵列排布方向与飞行方向垂直。工作时系统以固定频率向环形垂直平面发射激光脉冲,更精确测量时可控制旋转系统,以更小的发射角度多次测量数据。每次接收到垂直于飞行方向的多个目标点的距离、角度信息。当机载平台沿飞行方向前进时,即可获得连续的激光点位数据信息。系统采用固联的IMU系统测量机载平台姿态,其惯性导航单元IMU用于测定飞行平台在空间的姿态参数,其姿态参数主要有侧滚角、俯仰角和航向角等。GNSS系统提供飞行平台的三维坐标信息,发射系统的坐标根据GNSS系统的坐标经IMU系统校正后可准确获得。机载环形旋转阵列激光在连续飞行期间以固定频率发射、接收目标点的距离及角度信息,采用高功率的激光单元,可获得毫米级的测量数据(见图4)[1]。
①激光扫描坐标系L-XYZ。原点L为激光发射原点;X轴指向飞行平面方向;Y轴指向载具右翼,与X轴垂直;Z轴指向重力反方向;環向旋转系统设置在YZ环向平面内。
②IMU坐标系I-XYZ。坐标系按惯性平台内部坐标系定义,原点I位于IMU的参考中心;X轴指向机身纵轴朝飞机前进方向;Y轴垂直于X轴,并指向飞机左翼;Z轴垂直向下。
③导航坐标系G-XYZ。依据GNSS系统提供的三维坐标进行相关计算。若空间有一向量S,其模为|S|(激光测距系统采集的距离数据),方向为L-XYZ的方向结合环形旋转阵列系统的激光角度信息计算得到,如能测出该向量起点LS的坐标XYZ,则目标点XYZ可唯一确定。研究系统直接获取的是激光测距信息,不能直接形成三维数据,因此,需要通过三维数据处理,将每个激光点的发射角及测距值求解为坐标系下的三维坐标。对机载系统来说,起点LS为激光信号发射点,其坐标可通过机载GNSS系统的G-XYZ记录数据与惯性测量装置IMU采集的I-XYZ经校正计算获得。通过三维解算处理,联合激光脉冲的测距信息、GNSS坐标、IMU姿态坐标,求出每个激光测距目标点的三维坐标XYZ[2],最终根据地面固定基准点的三维坐标,考虑各种采集误差,精确计算出实际目标点的真实三维坐标。采集出的三维点在三维建模软件中导入经计算后的数据,自动建模出采集目标物的三维模型。在三维建模软件中设置检测参数、计算原理及计算模型,导出检测项目的自动化生成数据。此外,考虑各种系统误差,剔除偏离实际数据较大的离散数据,得到目标体的连续检测数据用于实际工作开展。
2.2.3 可行性分析
①理论及研究方法的可行性。本研究项目以激光测距系统LRF、高精度动态载体姿态测量系统IMU、卫星导航系统GNSS、空间直角坐标原理为主要研究理论。上述理论已发展多年,理论及相关实现技术已十分成熟并大规模运用于实际生产,研究系统理论基础可靠,方法可行。
②试验技术和方法的可行性。系统参考各种前沿科技的技术方法,结合自主设计的环形旋转阵列发射装置,设计思想富有创造性和前瞻性,是目前各项技术的延伸和改进,解决了其他研究领域精度不足的问题,且解决现有问题的方法独特,技术可行。
3 关键技术
①针对评定检测参数的统计点数少、检测频率低等问题,该系统可自由设置检测频率以及环向检测点数,确需缩小环向检测间距时,可旋转环向发射装置,使环向检测点数实现倍数增加。本系统实现了从传统单点、单平面向多点、三维的检测方式跨越。以隧道工程检测为例,可使用本系统对初期支护完成后的隧道纵向、环向断面进行连续检测,得到初期支护的三维数据模型。待二次衬砌施工完成后,使用本系统对二次衬砌进行纵向、环向连续检测,得到二次衬砌的三维数据模型。将二次衬砌和初期支护的三维数据导入三维软件,设置计算模型、数据计算频率,可导出旋转角度相同的点位的二次衬砌厚度。
②目前,激光雷达领域基于线阵、面阵等多元阵列探测器的探测技术的数据分辨率不高,不能用于精确测量,本系统在运用其他前沿科技的基础上,环形旋转阵列式激光布置,正是对线阵、面阵等数据采集方法的创造性改进,使得目标点的单点采集更精确,环向采集频率、纵向步进间距更有益于满足目标物检测精确性的要求,使采集精度得到了数量级的提高。
③目前,检测行业的数据采集均是基于测量人员的单点检测,工作效率和检测覆盖面较窄,只能检测局部点、局部平面的形态或质量,不能用于大面积连续的检测。本系统解决了目前检测点数偏少、检测工作效率低的问题,不仅使检测效率提升数倍,而且使检测成本大幅降低。使用本系统可根据实际需要,设置不同的环向采集频率、纵向步进间距,以达到节约社会资源的目的。
4 特色与创新
本项目研究的环形旋转阵列式激光雷达检测一体化系统,是激光测距系统和激光雷达技术的融合,使用激光测距原理,参考激光雷达的阵列数据采集方法,自主设计创造出以机载行进、环形旋转阵列式激光布置,实现连续单平面多通道精确检测。该套检测系统的数据采集方式为空中间接接触式,不同于目前检测行业普遍采用的接触式检测方法,检测环境及地形限制较少,极大地增加了多种检测环境的适用性。
目前,大多数商用系统采用单点扫描方式,每次激光脉冲采集一个目标点数据,通过激光单元扫描镜摆扫以及飞机运动实现一个航带的三维点云获取。随着高分辨率、连续、快速采集数据的应用需求增加,基于线阵、面阵等多阵列的激光雷达探测技术已经成为技术领域的发展方向,新型机载激光雷达技术极大地提高了目标探测的分辨率及成像速率。该系统运用激光测距的理论基础,创新了激光采集阵列形式,增加了检测数据的统计点数,提高了采集精度,使之运用于更精确的测量工作。
该系统借鉴激光雷达的采集原理,使用环形旋转阵列式的发射接收方式,设计出了一种全新的激光雷达检测系统,不仅达到了激光雷达的使用效果,而且使数据精度得到数量级的提高。
5 结论与展望
机载激光雷达由于高工作效率和高测量精度等优势,迅速发展成为地表环境测量的主要技术手段之一。借助其他行业的研究经验,将机载激光雷达检测逐渐应用于公路及铁路,助力检测及监测行业的技术创新发展。
该系统可纵向、环向全方位连续进行检测,推动检测工作进步与检测数据智能化发展,可大幅度提高检测技术水平,推动行检测业和社會技术进步,为其他行业在激光雷达测量方面提供一个全新的测量方法。该系统可满足公路、铁路及勘探方面的所有检测及测量技术需求,可实现单次检测所有适用项目,极大地提高工作效率,减少社会资源浪费,可替代许多既有检测设备。该套检测系统可同时检测诸多参数,体现单套系统检测多项参数的优越性。
本文针对环形旋转阵列式激光雷达检测系统进行了详细的设计及研究,验证了本文提出方法的正确性和可行性。环形旋转阵列式激光雷达技术目前处于探索阶段,随着国内外激光雷达技术的日益发展,基于线阵、面阵探测器的阵列式机载激光雷达技术将是激光雷达领域的发展趋势,相关的硬件设备、数据处理工作也将同步飞速发展,下一步激光雷达的探索发展会使采集数据精度得到大幅度的提升。
【参考文献】
【1】郜松松.机载便携式激光雷达信号采集存储系统设计[D].西安:西安电子科技大学,2019.
【2】黎荆梅,周梅,李传荣.阵列推扫式机载激光雷达三维点云解算方法研究[J].遥感技术与应用,2013,28(6):1033-1038.
【作者简介】杨涛涛(1988-),男,甘肃庆阳人,工程师,从事隧道检测研究。
