基于视觉导航的无人机自主着舰技术研究
2022-04-20肖思宇
肖思宇
(中国直升机设计研究所,江西 景德镇 333000)
舰载型无人机可执行综合侦察、辅助探潜、通信中继、电磁对抗、应急保障等任务,具有低成本、长续航、用途广的优势,在海军作战体系中扮演越来越重要的角色[1,2]。受海上环境和舰船自身运动的影响,舰载型无人机着舰阶段事故率最高,因此自主着舰技术的发展非常关键。目前国内外常用的无人机导航方式有:惯性导航系统(INS)、全球定位系统(GPS)、INS/GPS 组合导航系统、视觉导航系统[3,4]。惯性导航系统的误差随时间积累,GPS抗干扰能力差,均不能满足复杂作战环境中舰载型无人机自主着舰的需求,而视觉导航系统能够自主输出无人机速度和航向的控制量,能耗低、抗干扰能力强、精确度高,与其他导航系统相比更适合舰载型无人机完成自主着舰任务。
基于位置的伺服控制技术和基于图像的伺服控制技术是常用的无人机视觉导航技术[5-7]。基于位置伺服的方法是根据相机解算出无人机与合作标志的相对位置,再根据相对位置控制无人机的航向和速度,实现自主着舰。而基于图像伺服的方法则是根据视觉辅助装置采集合作标志的图像特征直接得到无人机的航向和速度控制量,提高了控制的时效性和准确度,因此本文选用基于图像伺服的控制方法。
1 无人机着舰过程
舰载型无人机进近段着舰过程如图1 所示,无人机距离舰船1km 左右时,INS/GPS 组合导航系统及舰船着舰引导系统给出无人机控制指令,使得无人机向舰船位置飞行。无人机降低自身高度的同时缩短与舰船的相对距离,当无人机抵达舰船上方50m 左右的着舰点时,进入自主着舰模式,视觉辅助装置的相机模块提取合作标志图像信息后给出导航控制指令,控制无人机降落到舰船指定位置。

图1 舰载型无人机进近段着舰过程
1.1 合作标志
合作标志是自主着舰技术的重要组成部分,直接影响视觉辅助装置控制无人机的精确性[8-9]。在无人机降落过程中,视觉辅助装置视场不断减小,应该确保在降落过程中相机视场始终能覆盖辅助标识,且在光强较弱的环境下相机能够识别合作标识,因此选用嵌套式的合作标志,并且合作标志能够被红外相机识别,合作标志如图2 所示。在无人机自主着舰过程中,相机模块优先提取大合作标志的图像信息,在无人机高度下降过程中,当相机视场不能覆盖大合作标志时,相机模块提取小合作标志的图像信息,嵌套式的合作标志很好的满足了自主着舰过程中相机提取图像信息的需求。

图2 合作标志
1.2 基于图像伺服的导航原理
基于图像伺服的导航原理如图3 所示,视觉辅助装置采集合作标志的图像并提取像素特征,视觉处理终端解算提取的图像特征与期望图像特征的偏差得到无人机的运动调整策略,输出四维速度控制量(X,Y,Z 方向的线速度和偏航角速度),对无人机的飞行速度和航向进行伺服控制。通过控制无人机各个方向的运动,使得无人机降落到指定位置。
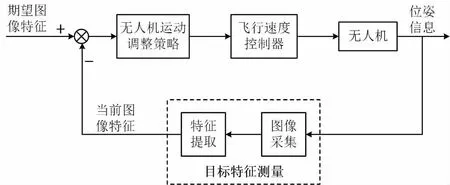
图3 基于图像的视觉伺服控制
2 视觉辅助装置
视觉辅助装置样机包括视觉处理终端、可见光相机、红外相机等模块。关于相机模块,可见光相机采集的图像视频分辨率不低于1920×1080 像素,红外相机采集的图像视频分辨率不低于1280×720 像素。视觉处理终端应满足重量较轻且功耗较低的要求,能够实时接收并处理相机模块的图像信息,监控无人机着舰的状态并向无人机飞控系统和测控系统传递控制指令。视觉辅助装置样机如图4 所示。

图4 视觉辅助装置样机
无人机自主降落的具体过程如图5 所示。首先根据现场环境的不同,分别选择两种不同相机采集合作标志的图像信息:当光照条件较好时,选择可见光相机;当光强较弱时,则选择红外相机。视觉辅助装置控制相机采集图像特征,再利用提取图像特征与期望图像特征的偏差控制无人机X、Y 方向的速度和偏航角,当无人机X、Y方向位置和偏航角的误差小于设定阈值时,认为无人机与合作标志对齐,输出Z 方向的速度控制量,开始降低高度的过程,同时继续维持X、Y 方向的控制。
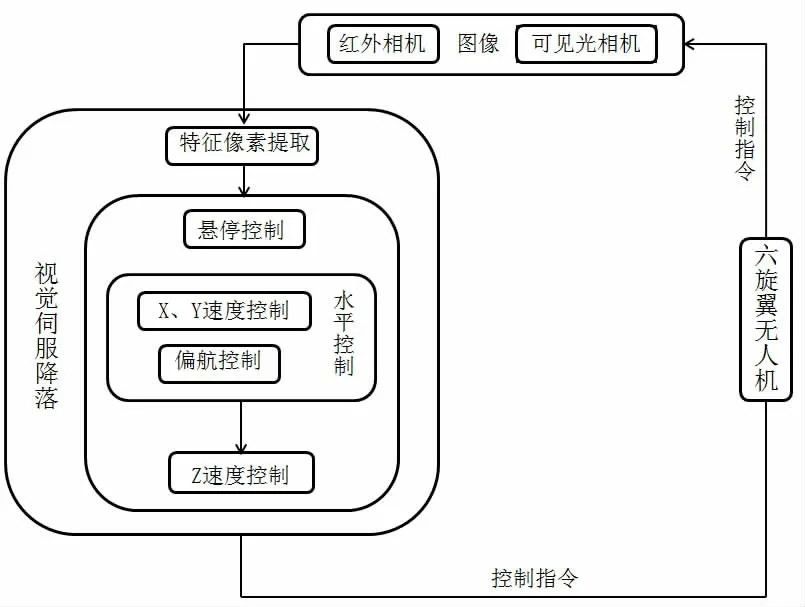
图5 无人机自主降落的控制过程
3 自主降落试验
在Gazebe 软件中构建海洋环境,海洋环境模型包含浪、风、雾、照明环境的模拟,控制仿真无人机模型在不同环境中降落在舰船模型上,完成基于图像伺服的自主着舰技术仿真验证后,研制了视觉辅助装置样机,并挂载在六旋翼无人机上进行试验验证,包含地面自主降落试验和舰面模拟台自主降落试验,挂载视觉辅助装置样机的六旋翼无人机如图6 所示。

图6 六旋翼无人机挂载视觉辅助装置样机
3.1 地面自主降落试验
在地面放置合作标志,六旋翼无人机挂载视觉辅助装置样机悬停在合作标志上方50m 左右的位置,与合作标志正中心偏离不超过2m,模拟舰载型无人机着陆过程。当降落高度在50m 左右时,无人机均能成功自主降落在合作标志上。降落点偏差即无人机降落点中心位置与合作标志中心位置的偏差,偏差值如表1 所示,多次试验结果表明,视觉辅助样机能够控制无人机自主降落在合作标志上,降落点偏差不超过0.15m,满足安全着陆的要求。

表1 不同高度自主降落的降落点偏差
3.2 舰面模拟台自主降落试验
海面上风浪导致舰船出现纵摇、横摇、纵荡、横摇、沉浮和艏摇现象,舰船运动响应随着海况等级的提升而加大,严重影响无人机的着舰安全[10,11]。其中横摇和纵摇运动对着舰安全威胁最大,参照法国“克里蒙梭”号航母为保证舰载机在5~6 级海况下进行作业的适航标准:横摇最大角度为3°,纵摇最大角度为1.4°,垂直位移最大为2.2m[12,13]。采用舰面模拟台模拟舰船甲板的运动,设置最大横摇角为5°,最大纵摇角度为2.5°。选用六自由度摇摆试验台作为舰面模拟台,如图7 所示。六旋翼无人机挂载视觉辅助样机悬停在着舰模拟台上方50m 左右的位置,与合作标志正中心偏离不超过2m,模拟舰载型无人机着陆过程。

图7 舰面模拟台
当无人机降落高度为50m 左右时,无人机均成功自主降落在舰面模拟台合作标志上,降落点偏差如表2 所示。试验结果表明:当舰面模拟台横摇角不超过5°,纵摇角度不超过2.5°,视觉辅助装置样机能够控制无人机准确地降落在合作标志上,降落点偏差不超过0.2m,能够满足安全着舰的要求。

表2 不同高度自主降落的降落点偏差
4 结论
针对无人机自主着舰问题,本文采用了基于图像伺服控制的无人机自主着舰方法,选用嵌套式的合作标志,研制了视觉辅助装置样机。六旋翼无人机挂载视觉辅助装置样机进行自主着陆试验和舰面模拟台降落试验,试验结果表明当舰面模拟台最大横摇角为5°及最大纵摇角度为2.5°时,视觉辅助装置样机能够控制无人机完成自主降落。
