通用航空监视系统的设计与实现
2022-04-20郝宏帅刘海涛
郝宏帅,刘海涛
通用航空监视系统的设计与实现
郝宏帅,刘海涛
(中国民航大学电子信息与自动化学院,天津 300300)
随着我国经济快速发展,通用航空的需求逐渐增大,但是对通用航空有效的监视保障系统还有待完善。针对通用航空存在无法有效实时跟踪监视的问题,利用ADS-B监视范围广的特点设计了通用航空监视系统软件,给出了软件的功能设计与系统架构,并详细介绍了监视系统软件实现的关键技术。最后利用ADS-B报文数据对通用航空监视系统软件进行测试,测试结果表明,所设计开发的通用航空监视系统软件可以对通用航空飞行器进行有效监视。
通用航空;ADS-B;航迹显示;冲突告警
0 引言
根据美国联邦航空管理局定义,通用航空指使用民用航空器从事公共航空运输以外的民用航空活动[1]。与民用航空相比,通用航空具有航空器体积小、飞行高度低、飞行速度慢、飞行航路多变、通航作业范围广等特点[2]。目前由于我国低空空域保障机制不健全,在通用航空监视方面,存在“看不见、叫不到、管不住”的现象,这种情况严重制约了我国通用航空的飞行安全[3]。广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)作为一种基于航空数据链的空管监视技术,与传统低空雷达监视相比,具有建设成本低、监视范围广、监视精度高和监视数据更新快等优势[4]。当前世界范围内各国都在积极推进ADS-B新技术[5],我国也已正式确定将ADS-B技术应用在通用航空监视中[6],因此基于ADS-B技术设计一款能有效监视通用航空飞行器的监视系统显得尤为重要。
围绕通用航空监视系统国内外学者做了大量的研究工作,为了监测配备ADS-B设备的通航飞机,安柏瑞德航空航天大学于2012年研制了智能化多功能显示系统(Embry-Riddle Aeronautical University Multi Information Display,EMID)[7],但此系统只是单纯地对通用航空飞行器进行显示,并未涉及通用航空避撞告警;针对低空空域所需监视能力不足的问题,2017年郭豫设计开发了基于北斗RDSS、雷达和ADS-B数据的通用航空飞行动态监视系统[8],但此系统只针对具体的机场管制台,监视具体的指定区域,没有充分发挥ADS-B监视范围广的优势;为解决通用航空实时监视等问题,2018年张贺设计了基于ADS-B的低空飞行监视系统[9],但是此系统软件视觉交互效果欠缺,不能有效区分显示不同避撞告警模式下航班飞行状态。
针对上述问题,本文采用文献[10]提出的ADS-B三级避撞告警提示模型,利用不同颜色编码显示不同冲突告警模式下通用航空飞行器的飞行状态,设计实现了通用航空监视系统。最后利用ADS-B接收机接收数据对通用航空监视系统软件测试,测试结果表明该软件可实现对通用航空飞机的有效监视和实时跟踪告警。
1 系统功能与架构
1.1 系统功能
为实现对通用航空飞行器的信息处理和有效监视,设计通用航空监视系统功能模块[4]。通用航空监视系统的功能包括通信连接、数据处理、数据管理、图表显示、冲突告警和辅助功能[11],通用航空监视系统功能模块设计图如图1所示。
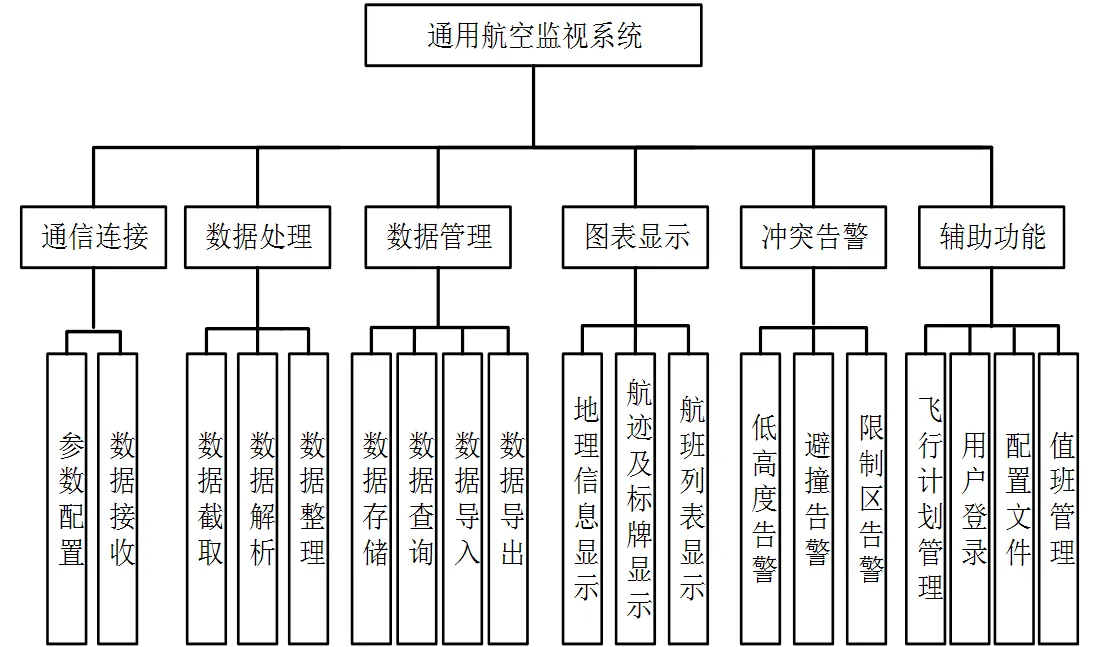
图1 通用航空监视系统功能模块
各个模块的主要功能如下所述:
1)通信连接
通用航空监视系统的通信连接功能主要负责数据的接收和传输参数的设置。传输参数设置包括通信的IP、端口号设置。传输参数设置成功后,软件系统开始进行数据接收,接收数据为ADS-B数据。
2)数据处理
通用航空监视系统数据处理模块的功能主要包括ADS-B数据截取、数据解析和数据整理。首先需要对接收到的报文进行数据截取操作,通过数据截取得到原始数据报文,然后根据DF-17报文标准对航班信息进行数据解析,通过数据解析得到通用航空飞机的航班号信息、位置信息、速度信息等,最后将通用航空报文信息进行数据整理,得到完整的报文信息。
3)数据管理
数据管理模块在通用航空监视系统中主要负责数据的存储、数据查询、数据导入和数据导出的工作。软件系统采用SQL Sever数据库对报文数据进行集中存储。在数据查询方面,提供地址码查询和ID查询两种查询方式。数据导入功能使监视系统软件可以二进制的形式加载.DAT报文数据文件。数据导出功能指在历史航迹显示时实现通用航空监视系统软件从数据库获取报文数据并导出到数据列表。
4)图表显示
图表显示模块主要包括地理信息显示、航行情报信息显示、航迹及航班标牌显示和航班信息列表显示。系统启动时通过自动加载的Shapefile格式数据文件和MapInfo数据格式文件显示地理信息和航行情报信息。航迹及航班标牌显示会在实时监视过程中展示飞机的尾迹点和飞行器标牌。为便于管制员区分实时显示航班列表和历史显示航班列表,实时显示航班列表使用画笔绘制而成,而历史航班信息列表采用List控件进行显示。
5)冲突告警
冲突告警模块包括避撞告警、低高度告警、限制区告警三部分。冲突告警模块中将限制区告警设置为最高等级,低高度告警设置为次高等级,最后为避撞告警。其中避撞告警功能采用三级避撞告警模式,对目标飞行器的周围空域由内而外依次划分为紧急避撞告警区域(Resolution Advisory,RA)、一般避撞告警区域(Traffic Advisory,TA)、提前避撞告警区域(Protected Advisory,PA)三个等 级[10]。为方便管制员查看不同等级的告警提示,飞机航班标牌及航班列表信息根据不同告警等级显示不同颜色。
6)辅助功能
辅助功能模块主要包括用户登录、飞行计划管理、配置文件和值班管理四部分[12]。为保证软件系统的安全性,系统运行时会优先弹出用户登录界面,管制员需要在账号密码登录操作成功后才可进入系统主界面。飞行计划管理功能和值班管理功能分别负责飞行计划信息和值班管理信息的设置,系统会将设置好的飞行计划信息和值班管理信息分别存储到Flight Plan Information.txt和Hand Info.txt文件中,管制员可以通过菜单栏进行查看。配置文件功能包含软件启动时需要加载的配置参数,通用航空监视软件使用的配置文件后缀为.ini。
1.2 系统架构
根据通用航空监视系统软件功能需求,采用分层设计的思想将通用航空监视软件系统架构设置为三层,分别为应用层、数据处理层和数据源层,软件系统架构图如图2所示。

图2 通用航空监视软件系统架构图
通用航空监视系统软件架构图各个层次的具体内容如下所述:
1)应用层
在系统结构中应用层相当于客户端,主要用来显示软件的各种操作界面。操作界面包括系统主界面和各个子界面,系统主界面可以完成软件的一系列功能操作,系统子界面包括用户登录界面、航迹规划界面、值班管理界面、图层配置界面和显示配置界面等。
2)数据处理层
数据处理层是整个软件的数据处理中心,主要完成数据解析、飞行器位置信息分析、冲突告警分析。数据解析时,按照DF-17编码标准对接收到的通用航空报文数据进行解析。飞行器位置信息分析是从解析结果中获取飞行器的位置信息,采用墨卡托投影计算方法将通用航空飞行器的实际位置信息转换为屏幕坐标位置信息。在进行冲突告警分析时,系统从解析结果中提取飞行器的位置信息,并分析判断飞行器是否进入限制区等禁飞区,通过目标飞行器的经纬度和高度信息,对目标飞行器进行冲突告警分析。
3)数据源层
数据源层负责软件通信链路的搭建、监视数据的接收和监视数据的存储。通用航空监视系统软件通过建立TCP网络连接与外部ADS-B接收机进行数据传输,并对接收到的数据进行集中存储。
2 系统关键技术
2.1 ADS-B数据处理
由于ADS-B监视范围广,监视数据更新频率快,因此通用航空监视系统接收到的ADS-B报文数据量较大;同时监视系统获取的ADS-B报文数据采用DF-17编码标准[13],DF-17报文包含航空飞行器在某一时刻的状态信息,包括速度、位置、航班号等;DF-17数据帧结构如表1所示,共计为 112 bit。
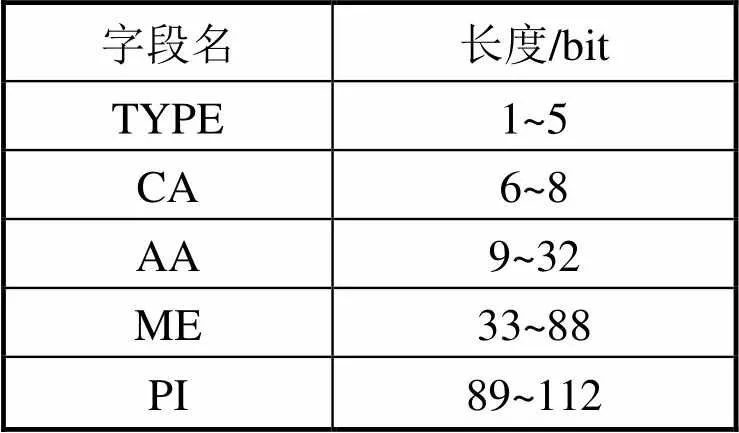
表1 DF-17报文结构
通用航空监视系统在接收到ADS-B报文数据后需要对报文数据进行数据截取、数据解析和数据整理等一系列操作。首先将系统接收的报文数据填充到数据截取缓冲区,然后对截取缓冲区中的数据进行数据截取,待截取缓冲区的数据全部截取完成后再进行数据解析操作。报文解析时需要对报文帧头和报文长度进行判别,如果不是整条报文则结束报文解析操作;若为整条报文信息则对接收的报文数据进行CRC校验、ICAO地址信息获取、ME字段数据信息的获取,然后根据DF-17报文规范对ME字段内容进行解析,最后将解析内容整理存储。报文解析流程图如图3所示。

图3 报文数据解析流程图
2.2 航迹实时显示
航迹实时显示包含航迹点显示和通用航空飞行器标牌显示。刷新显示时为避免出现闪屏现象,实时航迹点和飞行器标牌的显示采用双缓冲技 术[13],即不直接在屏幕内存上绘图,而是先在后台建立一个绘图缓冲区,在后台缓冲区中绘图,将绘制完成的图形复制到屏幕缓冲区中。
实时航迹及通用航空飞行器标牌显示流程图如图4所示。首先建立一个后台绘图缓冲区,然后遍历list链表,在获取通航飞行器信息之前判断是否进行航班筛选操作,若进行航班筛选则只需获取符合筛选条件的通航飞行器信息,若不进行航班筛选操作则直接获取全部航班信息,然后将通航飞行器的实际位置信息转换为屏幕位置信息,根据屏幕位置绘制通航飞行器的航迹点。通航飞行器标牌信息包括地址码、航班号、高度、经纬度等信息,飞行器标牌可以根据用户需求显示航班信息,也可以选择简化模式只显示通用航空飞行器的地址码,飞行器标牌与航迹点由虚线连接,最后将后台缓冲区中的内容复制到前台进行显示。

图4 实时航迹及航班标牌显示流程图
2.3 冲突告警
在设计冲突告警模块之前,需要对通用航空飞行器周围的空间进行建模分析,本次设计采用文献[15]介绍的圆柱保护区模型,圆柱体水平截面为圆面,圆面半径即为两架飞机相向飞行的距离。
对飞机周围空间建模分析后,需要对飞机周围的空域进行划分及设计,将飞机周围空域划分为三个等级的避撞告警模式,由内而外依次为RA、TA、PA,依据文献[10]采用通用航空飞行器最大飞行速度300 km/s,对向飞行时间设置为35 s和50 s,故RA、TA区域的水平面半径依次设置为5.83 km和9.26 km,PA区域设置为30 km。基于ADS-B的通用航空三级避撞告警平面示意图如图5所示。

图5 基于ADS-B的通用航空三级避撞告警平面示意图
在实时显示航迹时,系统会根据不同告警模式将飞行器标牌显示为不同的颜色。当有目标飞行器进入RA区域时,飞行器标牌显示橙色;目标飞行器进入TA区域时,飞行器标牌显示黄色;目标飞行器进入PA区域时,飞行器标牌显示蓝色;三种避撞告警模式的优先级由高到低依次为RA、TA、PA。
在三级避撞告警等级之上还有限制区告警和低高度告警两种告警模式,其中将限制区告警设为最高等级,限制区告警采用引射线法[9]判断通用航空飞行器是否进入限制区域内,引射线法原理图如图6所示。以目标飞行器为原点,向四周发射射线,当与目标区域交点为偶数时表示飞行器未进入目标区域;交点为奇数表示飞行器已进入目标区域。当有通用航空飞行器进入限制区域时飞行器标牌显示为红色,并且不显示三级避撞告警环。
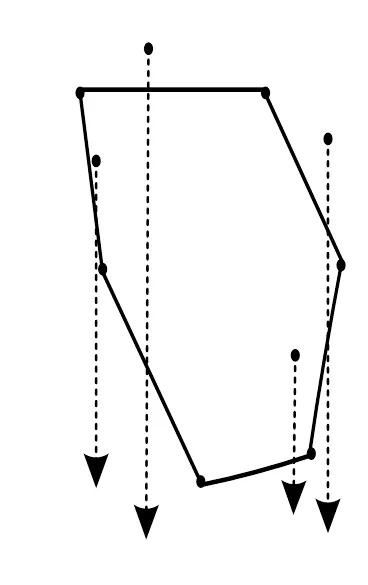
图6 引射线法原理图
将低高度告警设置为次高等级,当通用航空飞行器飞行高度小于150 m时系统进行低高度告警,此时飞行器标牌显示为白色,并且正常显示三级避撞告警环。不存在告警时,航班列表及标牌保持原色(绿色)不变。
冲突告警模块整体流程图如图7所示,如果只有一架通用航空飞行器,则只进行限制区告警和低高度告警判断;如果航班架次多于一架,则依次进行限制区告警、低高度告警、RA、TA、PA区域告警判断,满足条件的航班标牌显示颜色依次为红色、白色、橙色、黄色和蓝色;若没有告警,则正常显示航班信息,航班标牌显示颜色为绿色。
3 系统运行与测试效果
通用航空监视系统测试图如图8所示,监视系统由航迹显示终端、ADS-B数据库和交换机组成。数据显示终端开发环境采用Visual Studio 2019,通过使用MFC建立软件交互界面。数据发送端采用ADS-B报文仿真软件,模拟仿真通用航空ADS-B报文数据并通过SOCKET网络连接发送给通用航空监视系统。
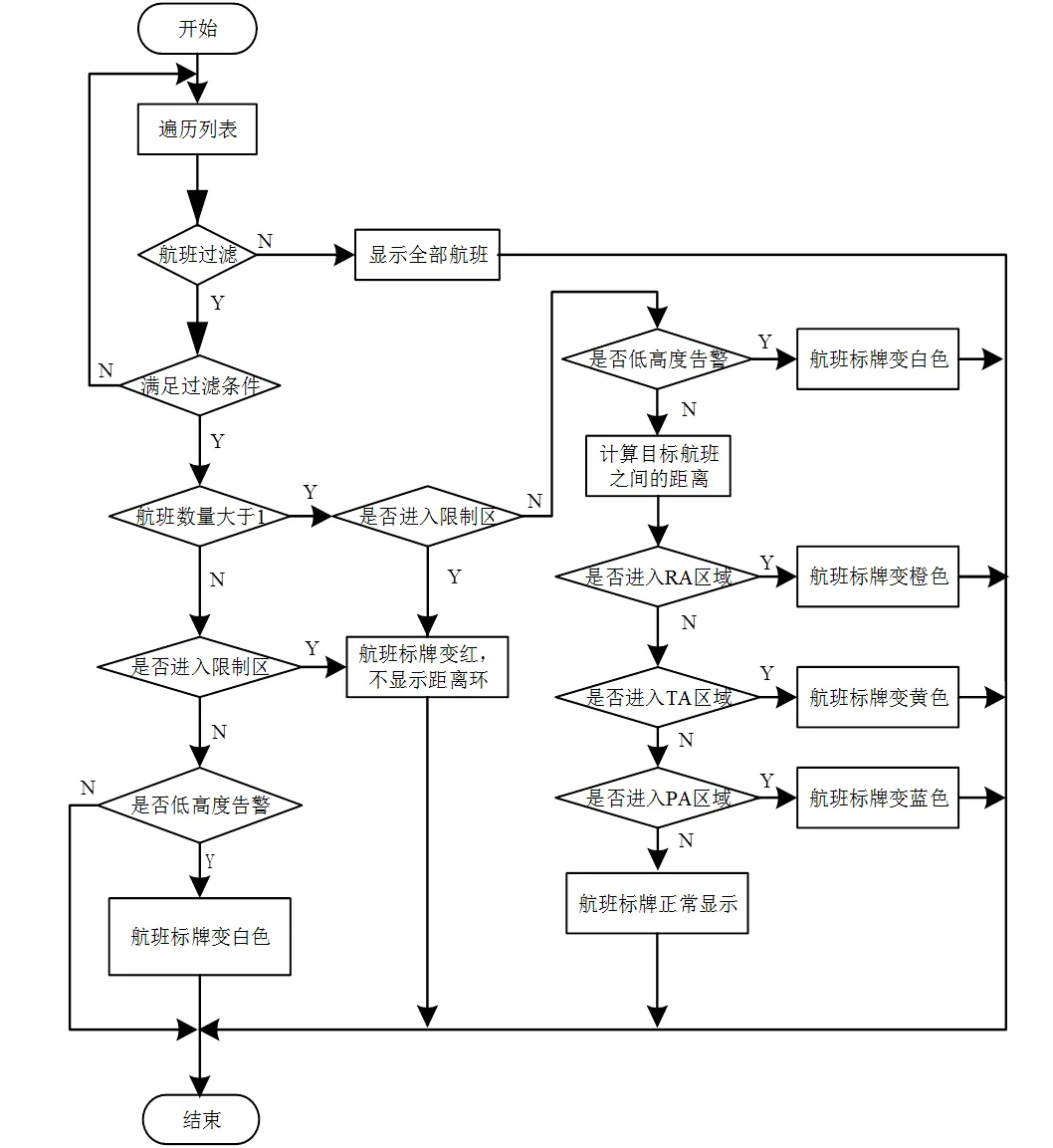
图7 告警模块整体流程图
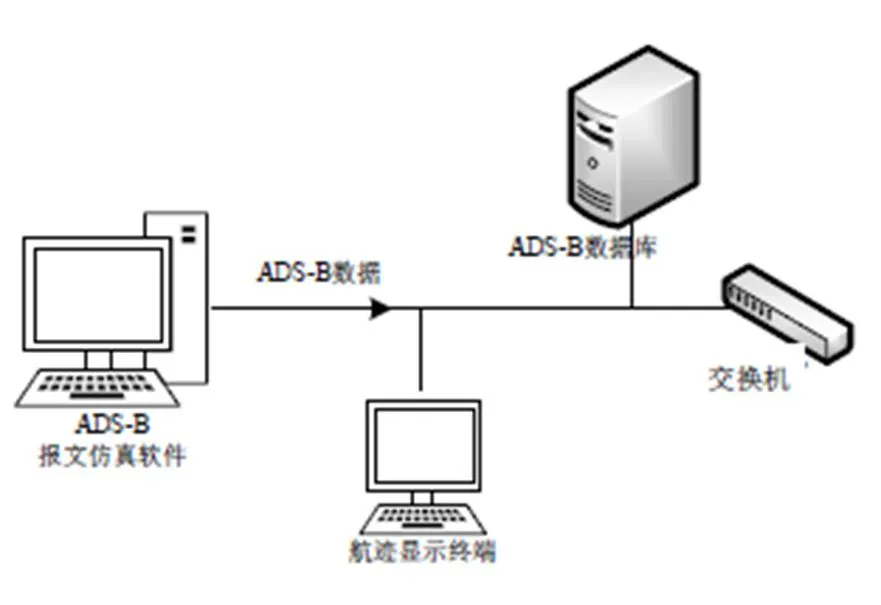
图8 通用航空监视系统测试图
软件运行环境为Intel(R) Core(TM) i5-8250U CPU @ 1.60 GHz,RAM为8.00 GB,电脑系统版本为Windows 10家庭中文版,以上环境可以实现软件基本功能需求和稳定的性能需求,连接ADS-B报文仿真软件对监视软件运行情况进行测试,软件运行效果图如图9所示。经测试,通用航空监视系统可以完成地理信息、航行情报信息和冲突告警信息的综合显示,各尺度下地图漫游时没有明显卡顿现象。软件可以完成通用航空飞行器的实时显示和全部历史航迹显示功能,支持历史航迹的查询、飞行计划管理和值班管理记录查看功能。软件经疲劳测试,可支持连续48小时的显示和全部历史航迹显示工作。
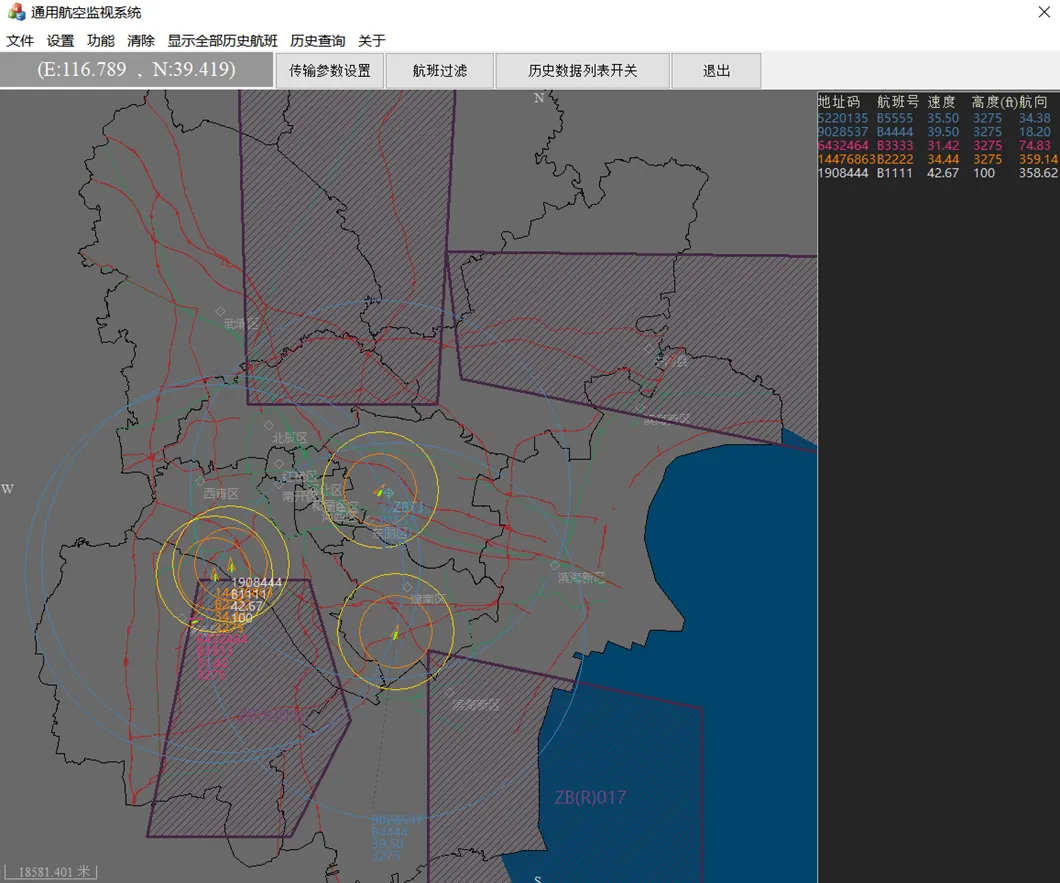
图9 通用航空监视系统软件运行效果图
4 结语
针对通用航空飞行器缺乏有效监视的问题,利用ADS-B的数据特点设计了通用航空监视系统。本文介绍了通用航空监视系统的软件功能与系统架构,并详细介绍了通用航空监视系统实现的关键技术。最后对通用航空监视系统进行测试,测试结果表明系统运行稳定,可完成对通用航空飞行器的有效监视,为通用航空相关ADS-B监视软件的开发提供参考,具有一定的实用价值。
[1] 杨凤田,李作学,马婧婧,等. 通用航空发展研究的热点与演进——基于知识图谱的可视化研究[J]. 北京航空航天大学学报(社会科学版),2020,33(3):92-100.
[2] 杜亚倩,张聊东. 我国通用航空发展现状及对策研究[J]. 科技创新与应用,2020(24):133-135.
[3] 刘韶滨,郭子超. 2021共融共享开创“十四五”通用航空发展新局面[N]. 中国民航报,2021-10-22(2).
[4] 刘海涛,金鑫. 星基ADS-B航迹显示终端设计与实现[J]. 中国民航大学学报,2019,4.
[5] 王尔申,宋远上,徐嵩,等. 基于“北斗”的低空空域通航飞机导航监视技术研究[J]. 南京航空航天大学学报,2019,51(5):586-591.
[6] 李波,刘建都,王庭良,等. ADS-B技术在通用航空避撞系统中应用研究[J]. 现代导航,2018,9(4):304-309.
[7] M Mahmoud, J Pesce. A Mobile Muti-Information Display for Surveillance Data[C]. Integrated Communications, Navigation and Surveillance Conference, Herndon, 2012, L5-1-L5-7.
[8] 郭豫. 通用航空飞行动态监视系统的设计与实现[D]. 西安:西安电子科技大学,2017.
[9] 张贺. 基于ADS-B的低空飞行监视系统研究与设计[D]. 上海:上海交通大学,2018.
[10] 李波,翟书颖,李茹,等. 一种采用ADS-B技术的通用航空防撞系统[J]. 电讯技术,2019,59(1):19-26.
[11] 王凤鑫. 星基ADS-B监视性能评估软件的设计与实现[D]. 天津:中国民航大学,2020.
[12] 胡洋. 通航飞行服务站飞行计划服务及低空监视的设计与实现[J]. 信息通信,2018,4.
[13] RTCA. Minimum Operational Performance Standards for 1090MHz Extended Squitter Automatic Dependent Surveillance-Broadcast (ADS-B) and Traffic Information Services-Broadcast (TIS-B)[S]. DO-260B, 2009.
[14] 江建国,温少营,张瑞楠. 基于双缓冲技术的GDI+无闪烁绘图[J]. 计算机应用,2012,32(2):136-139.
[15] 倪壮. 民机机载防撞系统算法研究与仿真[D]. 上海:上海交通大学,2015.
Design and Application of General Aviation Surveillance System
HAO Hongshuai, LIU Haitao
With the rapid development of China's economy in recent years, the demand for general aviation has gradually increased, but the effective surveillance and guarantee system for general aviation still needs to be improved. More specifically, the problem that general aviation cannot effectively track and monitor in real-time needs to be solved. Accordingly, ADS-B system is characterized by the wide monitoring range. Based on that, the general aviation monitoring system software is designed. From the perspective of functional design and system architecture of the software, the key technologies of the general aviation surveillance system software is introduced in the paper. In conclusion, the ADS-B message data show that the designed and developed General Aviation Surveillance System software can effectively monitor general aviation aircraft.
General Aviation; ADS-B; Fight Track Display; Alarm Prompt
V351.37
A
1674-7976-(2022)-01-023-06
2021-12-28。
国家重点研发计划(2016YFB0502402)
郝宏帅(1994.02—),河北唐山人,硕士研究生,主要研究方向为航空移动通信。
