面向无人机城市空中视觉导航仿真平台实现
2022-04-20熊乾凯李诚龙许富龙
曾 龙,熊乾凯,江 波,李诚龙,许富龙
面向无人机城市空中视觉导航仿真平台实现
曾 龙,熊乾凯,江 波,李诚龙,许富龙
(中国民用航空飞行学院空中交通管理学院,广汉 618300)
系统仿真是无人机飞行导航与控制程序设计的重要手段,面向城市空中交通场景视觉导航算法设计的开发需求,首先调研了针对无人机所开发的多种飞行器仿真模拟平台,确定了基于Airsim搭建所需城市空中视觉导航仿真平台的技术路线,并进一步详细介绍了该仿真平台的搭建方法,最后给出了该仿真场景的搭建结果。
无人机;仿真平台;城市空中交通;视觉导航
0 引言
相比传统的固定翼飞行器,无人机具有可垂直起降、机动性强、成本低等特点,在农业、交通、物流、植保、军事等领域获得广泛应用。随着计算机仿真技术的发展,基于可视化交互的机器人仿真技术获得了快速的发展和应用。为减少无人机飞行试验中天气、光照等自然因素的影响,同时考虑到试飞区域的限制以及飞行器的安全问题,近年来相关研究人员针对不同的实验需求,利用计算机建立了多种飞行仿真模拟平台,以此来进行无人机的研制开发、飞行试验以及算法实验,有效地降低了研究成本,并具有效率高、复用性高、扩展性好等特点。
城市空中交通(Urban Air Mobility,UAM)这一新兴航空运输概念自2017年由NASA等机构提出以来,一直受到各航空机构与厂商的广泛关注[1],成为城市交通新的热点研究领域。城市环境具有地形复杂、电磁干扰强的特点,尤其是高层建筑会对飞行器导航信号产生多径干扰和屏蔽效应,导致飞行器GNSS信号跳变甚至丢失,因此除卫星信号导航之外的多种传感器导航方式研究可以为UAM提供冗余的导航数据备份。本文基于AirSim仿真软件,针对UAM特定环境提出了一套视觉仿真平台。
本文从工程应用需求出发,收集分析当前常用的无人机仿真平台,介绍各种仿真平台的总体设计、基本框架等,并对各种仿真平台优缺点进行分析对比。
1 无人机仿真平台对比
1.1 Flight Gear飞行模拟器
Flight Gear开源飞行模拟器自1997年发布至今,作为一款自由软件一直持续更新。其仿真效果如图1所示。当前最新版本发布于2021年7月,适用于Windows、Ubuntu、Mac等操作系统,采用了基于美国地质勘探局发布的卫星数据,建立了大多数区域的三维地貌特征,并收录了全球主要机场的各类信息,支持数百种飞行器模型[2]。

图1 Flight Gear仿真效果
开放者为便于地形模拟、飞行器设计、声效设计等不同需求的开发,Flight Gear为多模块化设计,对某一模块进行升级时不需要对整个系统进行重新编译[3],具有较高的开放性和用户可扩展性。经过多年的发展,Flight Gear的结构框架较为复杂,其系统与模块相互关系如图2所示。该模拟器中最重要的模块为飞行动力学系统与飞行控制系统,这两部分通过读取外部接口传输的数据进行内部解算,得到可视化模拟所需数据,实现对飞行器飞行航迹的模拟。之后通过对地形渲染、声效系统、电子导航系统等模块进行数据交互,完成对整个飞行的仿真模拟。Flight Gear仿真建模重在建立高精度、高真实感的机场跑道、飞行器等模型,地形中的其他地物纹理主要是通过图片的重复铺贴来实现,有明显的人工痕迹,导致真实感较低[4]。
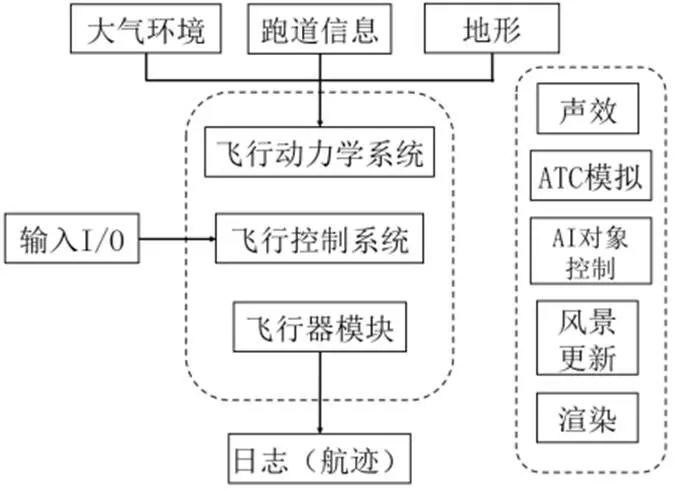
图2 Flight Gear仿真平台框架
1.2 Gazebo机器人仿真平台
Gazebo机器人仿真平台由A Howard等人于2002年开发[5],旨在复杂条件下对室内外环境进行机器人模拟。2009年Gazebo集成了ROS和PR2,成为ROS社区使用的主要工具之一。当前Gazebo具有较好的物理引擎、归回测试和AI训练系统,可以对机器人进行高仿真度模拟。其仿真效果如图3所示。
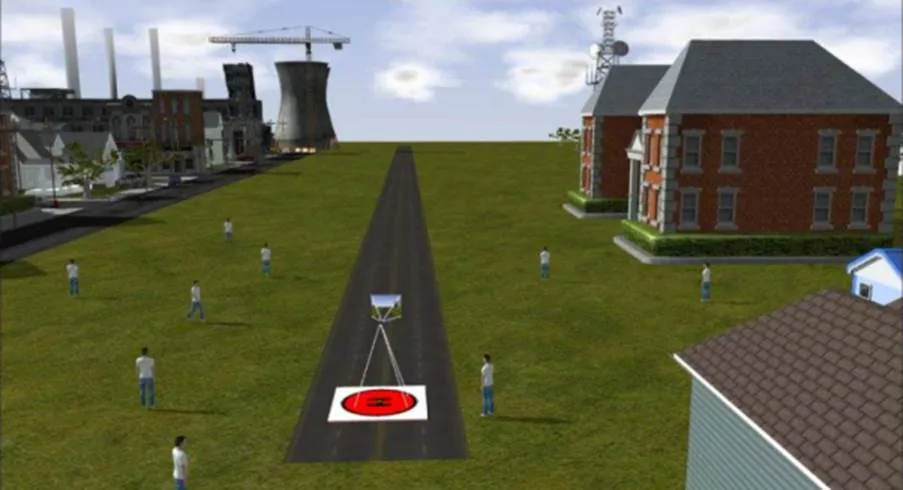
图3 Gazebo仿真效果
Gazebo仿真结构如图4所示。世界模块为所有模型和环境因素的集合,包括重力、照明等。每个模型由至少一个主题和任意数量的关节、传感器组成。该平台设计了简单的API来完成模型的建立,这些API的底层为处理物理模拟和可视化的第三方库,通过共享的内存接口接受客户端命令并返回数据。Gazebo可以针对多旋翼无人机、固定翼飞行器、汽车、关节机器人等进行机械仿真,但其仿真场景与渲染较为落后,不适用于基于视觉的算法实验[6]。
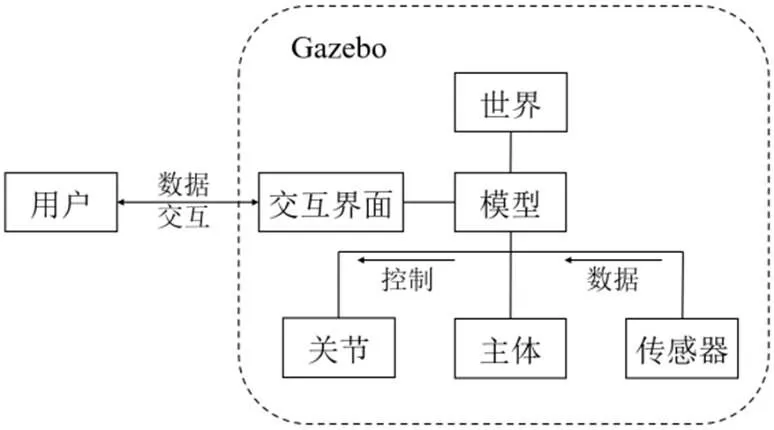
图4 Gazebo仿真平台框架
1.3 jMavSim仿真软件
jMavSim是轻量级的旋翼飞行器仿真软件[7],可通过PX4对仿真环境中的飞行进行控制,并支持Mavlink协议。该仿真软件采用UDP接口与地面站连接并进行数据传输,与地面站连接后,作为地面站与自动驾驶仪之间的桥梁,完成可视化仿真,其仿真效果如图5所示。jMavSim使用了Java3d库进行可视化,但由于Java3D库已经停产了很长时间,虽然现在已经开始再次维护,但其环境建模和渲染效果较差,而且不支持添加各类传感器,因此jMavSim更侧重于基于飞控的相关算法测试,不能进行基于各传感器的无人机仿真实验。

图5 jMavSim仿真效果
1.4 AirSim仿真平台
AirSim仿真平台是由微软公司开发的一款开源无人车/无人机仿真平台[8],其仿真环境是基于虚幻引擎(Unreal Engine,UE)开发的,支持跨平台的软/硬件在环仿真,其主要特点是具有极高的物理与视觉还原度,适用于自动驾驶相关的深度学习、计算机视觉以及强化学习算法的研究,其仿真效果如图6所示。

图6 AirSim仿真效果
AirSim具有强大的场景搭建工具,包括城市、林地、湖泊、小镇等丰富的场景,开发者可以在城市中心、乡镇道路、郊野、工业区等多样的环境下对飞行器算法进行测试。AirSim支持MavLink等主流无人机协议,可使用Pixhawk以及PX4固件对仿真环境中的无人机进行直接控制。同时该仿真平台支持C++与Python语言,提供了多语言的API接口,具有完善的底层控制框架,可直接对中上层控制进行设计。AirSim具备了多样的传感器,包括单目相机、双目相机、深度相机、IMU、激光雷达、全球定位导航系统、磁力传感器等,具备较高的扩展性。其仿真平台框架如图7所示。
2 城市空中交通视觉导航仿真平台
考虑到城市复杂环境的影响,以及城市空中无人机试验的安全性等因素,UAM环境下的视觉导航研究需要在仿真环境下进行试验,为此本文提出一种基于AirSim的城市空中交通仿真平台。该仿真环境覆盖了对空中航路、复杂地形(城市楼宇间)、恶劣天气(强风、大雾)、昼夜明暗、非合作目标闯入等多类场景的模拟能力,可以获取无人机飞行期间的单目、双目、深度相机、激光雷达等多传感器信号。考虑到城市场景的特点,在该环境中1:1还原了城市高楼、道路等元素,同时在选择好的各高楼顶添加无人机停机坪,便于后续开展无人机航路设计、视觉导航等工作,其仿真效果如图8所示。
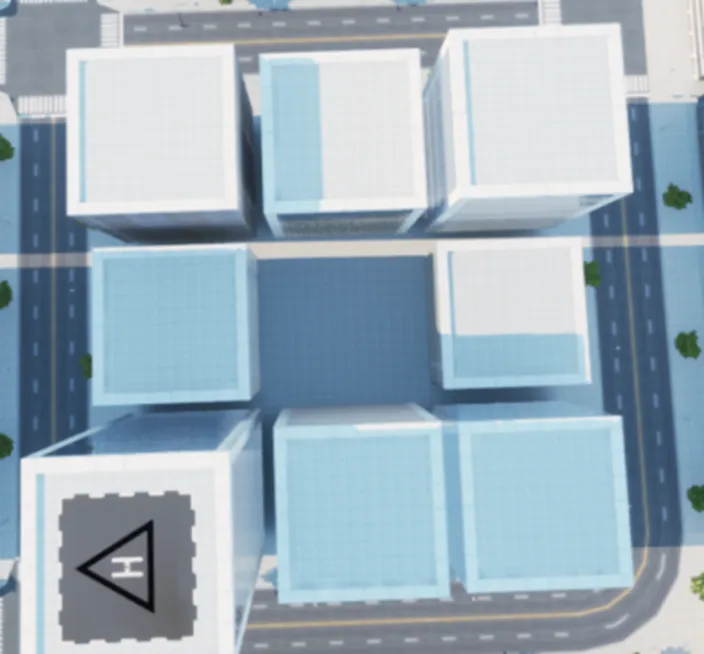
图8 城市空中交通仿真平台效果
2.1 搭建平台
本平台的搭建主要是为了在UAM环境下进行无人机视觉导航算法的研究,对仿真环境的模拟能力要求较高,其仿真环境需要对包括停机坪、道路、中高层建筑等元素进行模拟。本平台的仿真环境主要以深圳地标建筑为原型,在中高层建筑楼顶放置了停机坪,停机坪设计要求满足《MH5013-2014民用直升机场飞行场地技术标准》[9],停机坪示意图如图9所示。

图9 停机坪着陆点示意图
本仿真平台主要分为仿真渲染和飞行控制两个部分。仿真渲染部分主要由虚幻物理引擎对城市环境与飞行器模型进行仿真,确保飞行器可以实时获取单目仿真图像;飞行控制部分包含无人机底层的API控制,允许单目、IMU、GPS等多传感器获取无人机实时数据,之后通过客户端编程来设计无人机的中上层控制,具体流程如图10所示。

图10 城市空中交通仿真平台流程图
2.2 仿真使用
文献[10]中设计了一种UAM环境下无人机斜飞起降方法,并在本仿真平台完成了仿真模拟实验。该平台首先完成城市环境与飞行器的仿真渲染,之后对飞行器进行最终进近阶段的航路设计,无人机在获取到实时的单目相机数据后,通过控制算法对无人机姿态进行调整。仿真平台使用效果如图11所示。

图11 无人机仿真平台使用效果
3 结论
本文总结了现今常用的无人机飞行仿真平台,如表1所示,首先对表1中飞行器平台进行对比,分别从是否开源、仿真模型、支持仿真的视觉传感器、ROS接口、逼真度、丰富度、可满足的仿真需求等几方面进行了比较分析。

表1 无人飞行仿真平台对比
为保证城市场景具有较高的视觉与物理仿真能力,本文最终选用AirSim作为仿真平台,完成了一种城市空中交通视觉导航仿真平台的搭建,为后续相关场景无人机视觉导航算法设计提供仿真基础。本文提出的仿真环境可以较好地完成城市关键元素的视觉与物理仿真,后续还需要在细节处进行改进。
[1] 李诚龙,屈文秋,等. 面向eVTOL航空器的城市空中运输交通管理综述[J]. 交通运输工程学报,2020,20(4):35-54.
[2] Perry A R. The flightgear flight simulator[C]//Proceedings of the USENIX Annual Technical Conference. 2004:686.
[3] 曹晖. 基于FlightGear的GBAS运行仿真关键技术研究[D]. 天津:中国民航大学,2017.
[4] 张绍泽,任磊. 飞行仿真系统中三维地形的仿真实现[J].现代导航,2021,12(6):434-437.
[5] Koenig N, Howard A. Design and use paradigms for gazebo, an open-source multi-robot simulator[C]//2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566). IEEE, 2004, 3: 2149-2154.
[6] 周游. 基于AirSim仿真平台的无人机三维避障算法研究[D]. 成都:电子科技大学,2020.
[7] jMavSim. https://github.com/PX4/jMAVSim.
[8] Shah S,Dey D,Lovett C, et al. Airsim: High-fidelity visual and physical simulation for autonomous vehicles[C]//Field and service robotics. Springer, Cham,2018: 621-635.
[9] Civil Aviation Administration of China. Technical Standards of Civil Heliports (MH5013-2014) [S]. 2014(6).
[10] Ye S,Wan Z,Zeng L,et al. A vision-based navigation method for eVTOL final approach in urban air mobility (UAM) [C]// 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI). IEEE, 2020: 645-649.
Realization of UAV-Oriented Urban Aerial Visual Navigation Simulation Platform
ZENG Long, XIONG Qiankai, JIANG Bo, LI Chenglong, XU Fulong
System simulation is an important measure for UAV flight navigation and controlling program design. To meet the development needs of visual navigation algorithm design in urban air mobility, a variety of aircraft simulation platforms developed for UAV is investigated in the paper. Then the technical route of building the required urban aerial visual navigation simulation platform based on Airsim is determined, and the construction method of the simulation platform is further introduced in detail and the simulation scene construction results are given.
Unmanned Aerial Vehicle; Simulation Platform; Urban Air Mobility; Visual Navigation
V249
A
1674-7976-(2022)-01-029-05
2021-12-16。
曾龙(1996.01—),甘肃武威人,硕士研究生,主要研究方向为城市空中交通无人机视觉导航研究。
