基于红外影像辅助的无人机自主巡检规划方法设计
2022-04-20赵彦杰张四维徐涛曹世鹏余万金
赵彦杰, 张四维, 徐涛, 曹世鹏, 余万金
(1.国网南京供电公司,江苏,南京 210000;2.众芯汉创(北京)科技有限公司,北京 100193)
0 引言
随着配电网规模的不断增大,对配电网的智能巡检能够从根本上保证配网的安全性,因此该技术也受到相关领域的极大关注[1]。结合无人机和红外成像技术,构建无人机自主巡检规划模型,通过智能规划控制和机器视觉分析的方法,实现无人机自主巡检规划,能够有效提高对配电网的智能巡检和控制能力[2]。
一般来说,对无人机自主巡检过程的规划设计是建立在对无人机自主巡检红外影像特征分析基础上实现的,然后结合智能空间规划和模糊度特征分析,构建无人机自主巡检红外影像采集和融合模型,再通过嵌入式控制和配电网的红外特征分析,实现对无人机自主巡检红外影像的处理[3],可提高无人机自主巡检红外成像能力,从而实现对巡检规划设计。传统研究中,无人机自主规划方法主要有基于边缘轮廓特征检测的无人机自主巡检规划方法[4]和基于DP算法的巡检规划方法等[5]。上述2种传统方法均结合视频跟踪识别技术,实现对无人机自主巡检红外影像处理和巡检规划。但传统方法的成像精准度不高,导致其巡检规划性能不好。
针对传统方法存在的问题,基于红外影像辅助技术设计新的无人机自主巡检规划方法。首先采用无人机红外成像技术实现对电网线路的红外成像处理,并提取无人机红外影像的边缘轮廓特征量和纹理信息。然后结合对无人机红外影像的图像融合和边缘区域检测,提取影像的像素类别,再通过模糊聚合融合处理方法,实现对影像的主成分特征检测,并采用融合滤波方法实现对影像的滤波和信息增强处理。基于此,建立无人机自主巡检红外影像的自适应图谱特征分集模型,结合相似度特征分解方法,实现无人机视觉跟踪和巡检规划设计。最后通过仿真测试分析结果,展示本文方法在提高无人机自主巡检规划能力方面的优越性能。
1 无人机自主巡检红外成像和预处理
1.1 红外影像成像
为了实现基于红外影像辅助的无人机自主巡检规划,首先采用无人机红外成像技术实现对电网线路的红外成像处理,再结合视觉传感和融合跟踪识别的方法,构建无人机红外成像的信息处理模型,在集成DSP中实现对无人机自主巡检红外影像融合处理[6],得到无人机自主巡检的图像处理模型如图1所示。
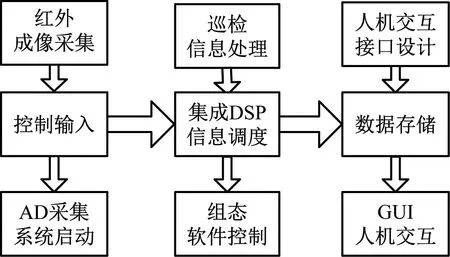
图1 无人机自主巡检红外影像处理模型
根据图1所示的无人机自主巡检红外影像处理模型,结合配电网的巡检参数识别和多维跟踪方法[7-8],得到无人机自主巡检红外辅助成像的特征图集满足式(1):
G=δ+(s(e)+lm)
(1)
式中,δ表示无人机自主巡检红外影像的边缘分布阈值,s(e)表示配电网巡检参数,lm表示组合滤波器控制的方法。在此基础上,对无人机自主巡检红外影像展开识别和滤波处理[9],得到无人机自主巡检红外影像的子带特征分布为
(2)
式中,dt表示模型预测参数,f表示概率密度特征分析参数,z(b)表示无人机自主巡检红外影像的滤波结构模型[10]。基于此,通过边缘轮廓特征检测,实现对无人机自主巡检红外影像的输出稳定性测试和图像增强处理。
1.2 红外影像增强处理
在机器视觉技术的支持下,提取无人机自主巡检红外影像的边缘轮廓特征量和纹理信息,再结合对无人机自主巡检红外影像的边缘区域检测和增强处理,在可靠性视觉跟踪模型下,得到无人机自主巡检红外影像的融合特征分量为J(x)。然后结合多模态融合方法,得到无人机自主巡检红外影像的边缘轮廓特征量为
(3)
式中,xv表示无人机自主巡检红外影像的边缘视觉特征分析模型,p(h)表示无人机自主巡检红外影像的边缘像素分布像素值。在此基础上,构造无人机红外影像的视觉增强模型,结合模糊特征辨识的方法,完成对红外影像的融合处理,再采用频域滤波分析的方法,结合融合规则技术实现对无人机自主巡检红外影像的协同滤波处理。这一过程中,用Xi,j来表示(i,j)位置处像素点,则可得到无人机自主巡检红外影像的主成分特征分量为
A=Xi,j+w(y)+d(a)
(4)
式中,w(y)表示无人机自主巡检红外影像融合参数。在此基础上,采用主成分融合和信息增强方法,得到无人机自主巡检红外影像的模态分量为
df(r)=A+[t(m)+f(u)]
(5)
在迭代和筛选过程中,t(m)表示无人机自主巡检红外影像的样本空间融合模型,在M×M维空间中采用模式识别技术,得到无人机自主巡检红外影像的局部信息增强分量为f(u)。然后采用相邻层间的特征融合的方法,得到无人机自主巡检红外影像的高低层级间融合匹配集如下:
Fz=df(r)+qk+v(n)
(6)
式中,qk表示特征融合方法参数,利用融合后的特征图集实现图像增强,并建立无人机自主巡检红外影像的特征提取模型为v(n),从而得到无人机自主巡检红外影像的滤波输出增量为
(7)
式中,f(u)表示无人机自主巡检红外影像的像素点分布,β表示模型的预测概率特征量[11]。利用上述过程,可实现对无人机自主巡检红外影像增强和信息融合处理。
2 无人机自主巡检规划研究
2.1 巡检过程红外影像滤波检测
在上述无人机自主巡检红外成像和增强处理的基础上,建立无人机自主巡检红外影像的自适应图谱特征分集模型,再采用边缘区块化融合的方法[12],得到无人机自主巡检红外影像重建的网格模型的空间量化特征函数可表示为
(8)
式中,αi表示无人机自主巡检红外影像的多维尺度特征分解模型,b表示无人机自主巡检红外影像的多尺度小波分解信息分量[13-14]。基于此,通过模糊聚合融合处理方法,实现对无人机自主巡检红外影像的主成分特征检测,得到无人机自主巡检红外影像重建的背景差分特征值:
hg=T(c)+E+Md(Ci)
(9)
式中,T(c)表示无人机自主巡检红外影像的块特征匹配值,Md(Ci)表示Ci中的显著区域检测特征量。采用角点检测进行无人机自主巡检红外影像的三维特征信息重组,得到无人机自主巡检红外影像的显著性图谱特征量为
M(y)=cos[q(s)+x(l)]+hg
(10)
式中,q(s)表示通过融合得到最终先验图参数,在机器视觉下提取无人机自主巡检红外影像的边缘轮廓特征量为x(l)。结合上述过程,构建无人机自主巡检红外影像的三维信息融合显著性概率特征分布集如下:
(11)
式中,ir表示多尺度超像素信息识别的方法参数,a(k)表示无人机自主巡检红外影像像素的图谱特征分量。然后基于多尺度分解的方法,定义无人机自主巡检红外影像的超像融合标签特征分量为nc,则可得到无人机自主巡检红外特征映射函数为
nc=[Gj+Gk]+Zv(e)
(12)
式中,Gj和Gk具有较强的关联性,Gk表示无人机自主巡检红外影像特征分布的尺度,Gj表示无人机自主巡检红外影像的边缘像素点的主成分信息[15-16]。根据上述分析,实现对无人机自主巡检红外影像滤波检测。
2.2 巡检规划输出
建立无人机自主巡检红外影像的自适应图谱特征分集模型,实现无人机自主巡检红外影像的视觉跟踪,得到无人机自主巡检红外影像的视觉信息解析模型为
(13)
式中,di表示相似度特征分解方法参数,h表示差异化权重融合参数,构建无人机自主巡检红外影像的边缘轮廓特征量表示为cb,由此可得到无人机自主巡检红外影像的解析模型表示为
H(f)=k(xi,xj)+Vs+I(i,j)
(14)
在融合聚焦区域中,定义无人机自主巡检红外影像的纹理特征分布核函数为k(xi,xj),结合RGB特征分解结果,将得到无人机自主巡检红外影像的超像素信息用I(i,j)描述,由此可得到无人机自主巡检红外影像的Harris角点分布序列I表示如下:
(15)
式中,k表示无人机自主巡检红外影像的多背景区域融合结果。在此基础上,结合空间分布域融合,得到无人机自主巡检红外影像的融合特征量为
(16)
式中,u表示无人机自主巡检红外影像的滤波函数值,P(i,j)表示无人机自主巡检红外影像的多尺度特征分布序列。结合相似度特征分解方法,实现无人机自主巡检红外影像的视觉跟踪,实现无人机自主巡检规划设计,实现流程如图2所示。
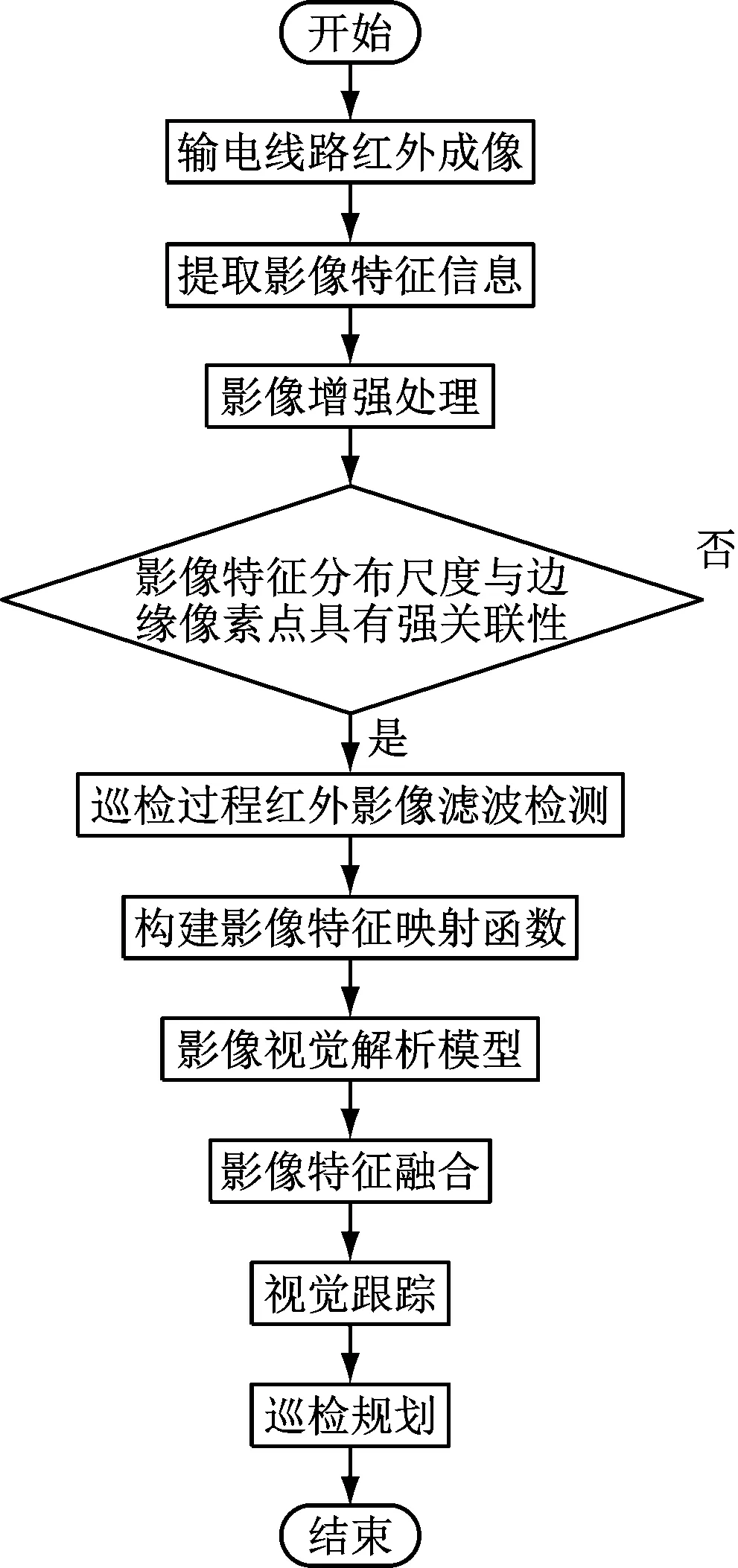
图2 无人机自主巡检规划实现流程
3 仿真测试分析
为验证本研究设计的基于红外影像辅助的无人机自主巡检规划方法的实际应用性能,设计如下仿真测试。在Simu-link仿真平台上进行无人机自主巡检规划的图像处理设计,对无人机自主巡检红外影像的采集像素点为120×240,对无人机自主巡检红外影像采集的频率为24 kHz,无人机自主巡检红外影像的采样点数为200个,特征图集大小为240,无人机自主巡检红外影像学习率的衰减尺度为0.35,相似度系数为0.16,根据上述参数设定,进行仿真测试。测试设备与环境如图3所示。

(a)测试设备
在上述实验环境中,采用无人机红外成像技术实现对电网线路的红外成像处理,在机器视觉技术的支持下,提取无人机自主巡检红外影像的边缘轮廓特征量,得到成像输出如图4所示。
以图4所示的无人机红外成像输出结果为研究对象,对无人机红外成像进行增强处理,实现无人机自主巡检红外影像优化,得到巡检规划结果如图5所示。

图4 无人机红外成像输出结果
分析图5得知,本文方法能有效实现对无人机自主巡检红外影像处理和规划,提高了无人机自主巡检规划能力。
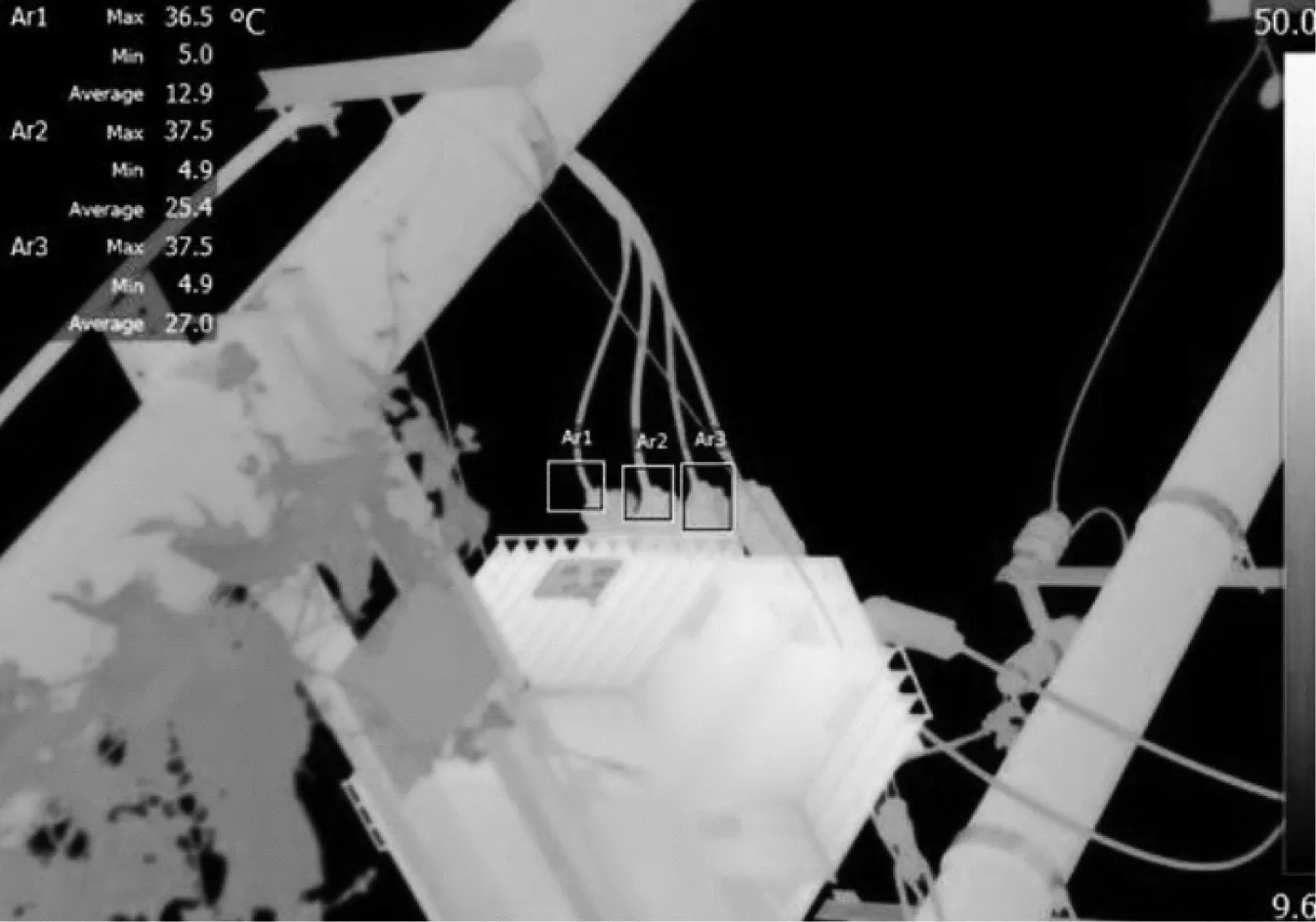
图5 无人机自主巡检规划结果
为进一步突出本文方法的有效性,将传统的基于边缘轮廓特征检测的无人机自主巡检规划方法(文献[4]方法)和基于DP算法的巡检规划方法(文献[5]方法)作为对比,测试不同方法进行无人机自主巡检后输出结果的准确性,得到检测概率对比结果如表1所示。
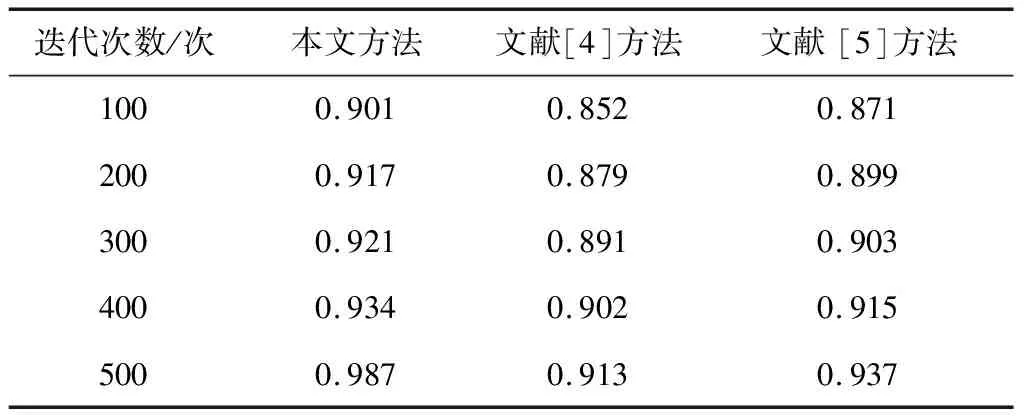
表1 无人机自主巡检规划的检测准确率对比
分析表1所示结果可知,随着迭代次数的增加,不同方法进行无人机自主巡检后输出结果的准确性也随之增加。但相比之下,本文方法的检测准确率更高,均可保持在0.90以上,证明本文方法对无人机自主巡检规划的精度更高。
4 总结
在构建无人机自主巡检规划模型的基础上,通过智能规划控制和机器视觉分析的方法,可实现无人机自主精准巡检规划。本文提出基于红外影像辅助的无人机自主巡检规划方法,构建无人机红外成像的信息处理模型后,在集成DSP中实现对无人机自主巡检红外影像融合处理,然后构造无人机自主巡检红外影像的视觉增强模型,结合模糊特征辨识的方法实现影像融合。基于此,结合相似度特征分解方法,实现无人机自主巡检红外影像的视觉跟踪,从而实现无人机自主巡检规划设计。经实验研究得知,本文方法对无人机自主巡检规划设计的检测准确率较高,说明其视觉检测能力较强。
