无人机短距着陆纵向控制策略设计
2022-04-19段鹏郑金豪吕健玮
段鹏,郑金豪,吕健玮
(南京航空航天大学 自动化学院,江苏 南京 211100)
0 引言
无人机是一种无人驾驶、可重复使用的航空器。飞行器通过飞行控制系统或依靠遥控指令进行自主飞行。随着无人机控制技术的成熟、无人机运营成本降低与实际需求的增加,无人机在科学研究、军事、民用等领域不断发光发热,无人机成为人们眼中未来前沿科技的代名词之一。在紧张的国际形势、紧密的战略部署以及各方投资资本作用下,无人机的发展正在驶入高速发展的快车道。
可重复使用的中大型无人机以轮式起降的固定翼无人机为主,该类无人机在无人机民用方面、军事用途、科学研究中占据巨大的比例。该类无人机的技术推进是无人机发展的重要体现之一。
目前军用机场建设位置较为固定,暂时能满足各类飞行器的起降要求。随着世界格局的快速变化,以轮式起降无人机为主的军用无人机开始进行大批量部署。但随着需求增加与具体应用和军事战略部署将引发一系列实际应用问题,如规划部署中的机场跑道场地选址难的问题等。民用无人机在军民融合政策的引领下发展势头逐渐壮大,各类通航飞机的无人机改造计划正在如火如荼地进行。诸多具备优良无人机特性潜力的机型正在改造进行中。各类资本企业为占领无人机未来市场,推动无人机的工业化进程也必须解决这一实际应用问题。而无人机滑跑距离过长是该问题的根本原因,故需要缩短无人机的滑跑距离。
目前,轮式起降固定翼无人机在中大型无人机整体数量以及用途需求上占大多数。但由于机场建设较为固定且跑道选址较为特殊,随着世界格局的影响以及无人机工业化进程的推进,迫切地需要短距起降。以推力矢量发动机进行的自主短距起降技术实际运用性较低,而现有的无人机气动设计不足以支撑无人机着陆短距要求。故本文设计了一种基于襟翼直接力控制下的着陆控制策略,以取得低速着陆短距效果的同时保证较好的鲁棒性。
本文以中大型常规气动布局固定翼无人机为研究对象,首先分析了其在无襟翼构型下着陆无法取得良好短距性能的问题;然后设计在连续襟翼下的着陆短距控制策略;最后经仿真对比证明控制策略下能提升无人机的着陆精度以及短距性能。
1 问题描述与机理分析
1.1 自主着陆短距要求
无人机着陆飞行过程大致有以下五个阶段:进场平飞段、轨迹捕获段、陡下滑段、浅下滑段和地面滑跑段(图1、表1)。各个阶段均肩负着独特的任务:进场平飞段时,切换着陆状态下的气动构型、以定高平飞的形式调整无人机飞行状态;轨迹捕获段时,捕捉无人机着陆轨迹,引导无人机切换着陆下滑模态;陡下滑段时,无人机在下滑过程沿着预设的着陆下滑轨迹线下滑,接近预设着陆点;浅下滑段时,无人机在沿着轨迹线逐渐拉起姿态调整飞行状态,直至安全接地;地面滑行段时,依靠阻力在地面上减速滑跑,直至停止着陆过程结束[1]。该阶段决定了无人机自主飞行成败。由于无人机间具有不同的特性,此外根据不同的应用场景需要指定不同的着陆要求指标,往往无人机着陆控制策略具有丰富的多样性。

图1 无人机着陆过程示意图

表1 着陆轨迹线参数列表
常规固定翼无人机的着陆短距要求主要有两点:1)较低的着陆速度。常规固定翼无人机在浅下滑一般下沉率从-2m/s左右变化到-0.5m/s触地且高度一般在10~20m,故浅下滑飞行时间大致可知。着陆距离与速度直接相关,减小着陆飞行速度对于短距而言极为重要。2)较高的着陆精度。无人机须在800m跑道上接地,且不能冲出跑道。由于无人机着陆的短距需求,需要无人机以较低的飞行速度接地,仅凭升降舵进行纵向轨迹控制会有发散的迹象,低速情况下不确定性干扰对空速的影响较大,从而会影响到无人机的着陆控制效果,故在触地速度达到要求的同时需要保证无人机着陆的精度问题[2]。
1.2 问题描述与机理分析
a)传统着陆纵向控制策略
传统无人机控制结构如图2所示,无人机在陡下滑段采用PI结构通过油门进行速度控制以保证速度精准闭环;升降舵以典型的阻尼内回路作为控制内回路,以PI结构的高度控制作为控制外回路,以实现无静差的高度控制。而在浅下滑段使用动态飞行法,使无人机在下滑的过程中逐步拉起姿态,利用无人机自身的阻力特性进行减速,进而以合适的俯仰角、飞行速度、下沉率接地,具体关键控制指令如表2所示。控制结构中去除图2中的虚线部分,升降舵仅保留角回路以及高度的比例控制项,发动机处于维持开车状态下的最小油门。
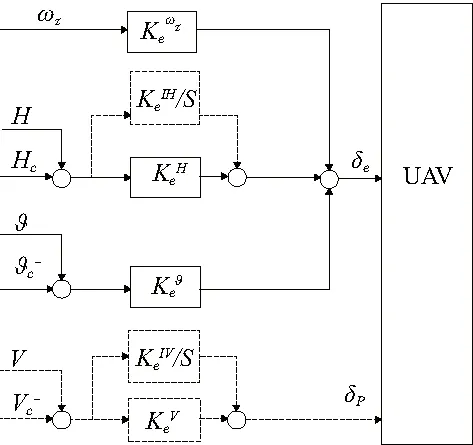
图2 传统着陆纵向控制策略结构

表2 关键控制指令
b)传统控制策略下的着陆仿真结果
传统无人机浅下滑段在10~20m,对象无人机在15m浅下滑高度下着陆的指标如图3所示。无人机的触地速度为40m/s,而15m高度的飞行距离在900m以上,再加上滑跑距离无人机的整体着陆距离应>1 200m。对象无人机虽然能够进行正常着陆但是其不具备短距着陆能力,故需要进行减速处理以缩短无人机的着陆距离以及滑跑距离。

图3 15 m浅下滑无人机触地指标
仿真结果说明常规控制策略下无人机的减速能力弱,无法取得良好的短距着陆效果。故应提高无人机的浅下滑高度,用于无人机的浅下滑减速。当无人机浅下滑高度提升至35m时,无人机能够达到无人机的短距着陆要求。但此时对无人机进行不确定性参数测试后(表3),阵风会导致无人机的触地偏差较大,会间接地威胁无人机的着陆安全。仿真结果说明常规控制策略下无人机的减速能力弱,无法取得良好的短距着陆效果。

表3 不确定性测试飞行数据表
c)传统控制策略的缺陷
1)陡下滑段速度大
无人机着陆时浅下滑段的初速度大,即陡下滑段的速度较大。在同质量及气动构型下以相同飞行迎角进行飞行时,无人机下滑速度越小,所需纵向平衡状态下的下滑轨迹倾角越小。为了使无人机在陡下滑段具备良好的速度控制能力,无人机的陡下滑阶段需要具备一定的油门开度。对象无人机以较小的速度进行陡下滑段飞行,会使得其下滑油门较小(表4),而对象无人机在小油门下的油门线性度较差且没有速度控制的余度,无法进行良好的速度控制。为了保证无人机的着陆安全以及着陆精度,对象无人机在无襟翼气动构型之下,无法大幅度降低陡下滑段飞行速度进行下滑,这使得对象无人机在进入浅下滑段时的初速度较大[3]。

表4 相同轨迹倾角下滑配平数据表
2)浅下滑段减速能力弱
无人机减速能力有两方面:一方面是减速时的加速度,另一方面是减速的距离。无人机在浅下滑段过程中油门开度不变即推力不变,重力分量近乎不变,此时无人机减速与阻力直接相关。由于对象无人机在小迎角下阻力系数偏小,故无人机需要进一步增大姿态。改变纵向受力增大迎角减小推力分量、增大重力分量,提高无人机的减速能力。对象无人机在无襟翼气动构型下的气动特性存在一定的特殊性,即升阻比曲线的起点较大外,随迎角增加升阻比曲线的增长曲线十分陡峭(图4)。
升阻比起点大且升阻比曲线陡的特殊表现为:在相同迎角下,随着迎角的增大,升力的增加远超过阻力的增加。若无人机在拉起减速的过程中较为迅速,当动压一定时,会引起无人机升力的急剧增加,而同时无人机阻力增大的幅度不大,导致无人机在浅下滑过程中快速拉起姿态十分容易拉飘。如图5所示,无人机在浅下滑减速过程中为了避免拉飘必须经历一定时间的姿态软化才能建立减速迎角,这又增加了无人机的飞行距离。而直接提高浅下滑高度后在不确定性影响下会威胁着陆安全(图6)。

图4 升阻比曲线

图5 浅下滑初期迎角变化
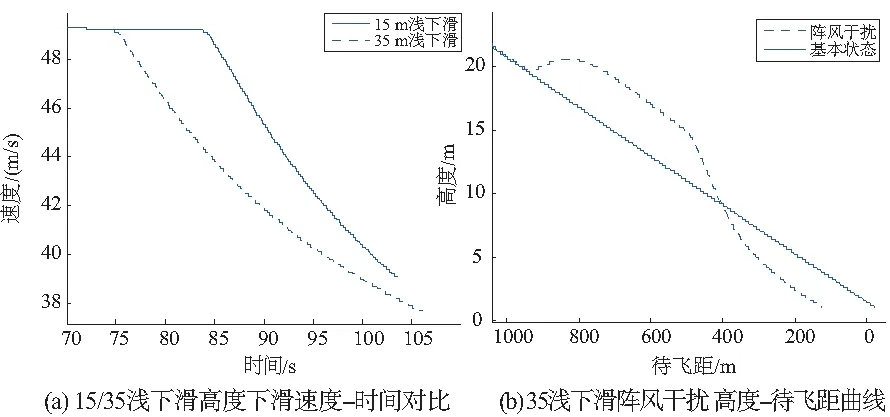
图6 35 m浅下滑着陆曲线
综上所述,对象无人机在无襟翼构型下,一方面浅下滑段减速过程中初速度大,另一方面减速效果极弱且相对比正常浅下滑高度数倍距离也不能获得良好的减速效果以及较好的抗风能力,故对象无人机在无襟翼构型下无法取得短距效果。
2 连续襟翼控制策略
2.1 控制方案机理
襟翼具备增升以及增阻效应可用于短距起降[4]。由图7可以看到,15°襟翼构型升力提升了将近50%,而在升力“顶点”所在的30°襟翼构型处升力提升了近1倍。在15°襟翼阻气动构型力系数就已经提升了1倍,在30°襟翼构型下提升了1.5倍。无人机有襟翼构型与无襟翼构型相比,一方面在相同的飞行迎角下无人机升力系数大幅度增加,在保持升力不变的情况下,通过无人机的切向与法向受力方程(式(1))可知,襟翼构型下升力系数CL增大近1倍且阻力系数CD增大1倍以上,故可大幅度减小无人机的下滑速度[5]。
(1)

图7 对象无人机升力/阻力特性曲线
另一方面无人机需要低速着陆以取得着陆的短距效果。然而在低速条件下仅凭升降舵无法抵御较大的阵风影响[6](图8),究其原因是阵风影响带来的空速影响。这会导致升力缺失使无人机掉高,升降舵舵效降低,威胁无人机的着陆安全以及触地精度。

图8 阵风着陆性能影响
选择连续襟翼控制策略的基准面后,使襟翼在连续作动的过程中不仅能增加升力还能减小升力。根据图7在同一迎角下随襟翼构型的升力系数变化,该襟翼控制的基准面需要具备一定的升力以及可控的升力系数范围。15°襟翼为各襟翼构型升力曲线的中心线,可有效地利用直接升力进行轨迹控制。
2.2 控制策略设计
首先选择了居于升力中心线的15°襟翼构型,利用襟翼增升、增阻的特性改善升阻特性,大幅缩短陡下滑段速度,然后在浅下滑段采用连续襟翼以直接升力的方法抵抗无人机的阵风影响,增强轨迹控制能力。
因为阵风主要影响不具备速度控制的浅下滑段,故主要对无人机的浅下滑段控制策略进行改进。阵风首先影响的是无人机的空速,进而改变无人机的升力和影响无人机的轨迹。阵风干扰后无人机升力增加,飞行轨迹发生上凸时,下沉率变化较为明显,可通过轨迹设计方法设计下沉率指令,故可选择下沉率偏差作为襟翼控制的输入量[7]。因下沉率是轨迹变化中相对于高度状态量相位更为超前的状态量,所以控制高度变化率更有利于进行轨迹的控制。本文采用PI控制结构增强对下沉率控制的精度[8]。
升降舵需要设计与预设着陆点,确定轨迹制导方案,与襟翼形成协同的控制方案,故为了简化控制律选用原控制策略,即高度制导方案,同时为了抵御襟翼作动带来的抬头力矩干扰加入襟翼补偿量[8],最终形成了以抵御阵风作用下襟翼下沉率的PI控制结构(图9)。升降舵以高度控制为外回路,俯仰角回路为内回路的控制结构。

图9 连续襟翼控制策略结构图
浅下滑段控制律如下:
(2)
(3)
2.3 可行性分析

图10(c)、图10(d)中虚线代表连续襟翼控制策略,而实线代表原浅下滑控制策略。通过曲线可知无人机在阵风下襟翼能够良好地控制下沉率变化,且在风干扰下连续襟翼可以降低速度的变化,且通过俯仰角指令进行拉起姿态时无人机速度的损耗较小,有助于升降舵的高度控制。

图10 可行性分析相关曲线
3 仿真对比与分析
10m/s阵风下对比传统控制策略与连续襟翼控制策略下的着陆仿真结果及分析,如图11、表5所示。


图11 加入阵风时仿真结果对比

表5 仿真结果分析表
4 结语
本文以一种常规固定翼无人机为研究对象,采用传统控制策略对无人机自主着陆的短距问题进行了详细分析。通过选择合适的连续襟翼控制策略的基准构型提高了无人机减速能力,并设计了连续襟翼控制策略以直接升力控制,提高了无人机在低速下的抗风能力以及轨迹控制能力,形成了以抵御阵风作用下襟翼下沉率的PI控制结构;升降舵以高度控制为外回路,俯仰角回路为内回路的控制结构。
通过仿真试验证明本文设计的控制策略的有效性,提高了无人机风干扰下的着陆精度以及短距性能。
