装甲车辆传动装置试验台无损连接制动系统研究
2022-04-18李胜军李金亮史寒冰方国震
李胜军,李金亮,史寒冰,方国震
(内蒙古第一机械集团股份有限公司计量检测中心,内蒙古包头 014030)
0 引言
装甲车辆传动装置是将液力元件、液压元件、变速机构、转向机构等部件功能集成实现动力的传递,以改变车辆的行驶状态,是实现装甲车辆快速机动的核心部件[1-3]。近年来,为了适应国家战略和军事转型需要,对装甲车辆的传动装置提出了越来越高的技术要求[4-5]。为了保证装甲车辆整车的可靠性,传动装置在装车之前必须在传动装置试验台上开展各项性能测试[6],其中输入输出功率(与转矩和转速的乘积成正比)是考核传动装置性能的重要技术指标[7-8]。
然而,目前正在执行的装甲车辆传动装置试验台校准技术规程JJF(军工)50-2014《试验台用转矩转速测量系统原位校准规范》,已经无法满足在大转矩3500~30000 N·m条件下对传动轴输入输出功率的校准要求,不能形成有效的量值溯源,影响了传动装置性能试验数据的准确性[9]。而且,由于传动试验台存在转矩大、试验空间狭小、难拆卸等问题,只有在现场对整套系统进行原位综合校准,与实际工况保持一致,使得传感器在标定时和试验时有着相同的受力和工作条件,才能保证校准的准确性。因此,设计一套能够形成有效的量值溯源的装甲车辆传动装置试验台大转矩原位校准系统具有重要的工程意义。
装甲车辆传动装置试验台大转矩原位校准系统主要由现场纯扭转大转矩动力输出装置、无损连接制动系统和标准扭矩传感器三部分组成。其中无损连接制动系统需要和传动装置试验台的输出轴连接,不仅要满足现场狭小空间,而且必须在承受现场纯扭转大转矩动力输出装置输出的大转矩时将传动轴抱紧制动,且不能损伤传动轴,有效保证动力输出值与测量值的一致性。由此可见,无损连接制动系统的优劣直接关系着装甲车辆传动装置试验台大转矩原位校准系统的准确性。因此,本文将重点对无损连接制动系统展开研究,设计一套与输出转矩相匹配的现场无损制动系统,利用标准扭矩传感器,完成试验台在系统固性不变、使用条件不变的情况下转矩的原位校准,实现量值的有效溯源,为装甲车辆传动装置的性能指标、参数试验验证、质量检验提供有效的计量保证。
1 无损连接制动系统的工作原理与结构设计
1.1 工作原理
装甲车辆传动装置试验台由加载电机、输出轴、转矩转速传感器和被测传动装置组成。
为了保证在加载电机、输出轴、被校转矩转速传感器和联轴器等设备固定不动的前提下实现对试验台的原位校准,需要在输出轴上加入无损连接制动装置,利用该装置与传动轴间的摩擦力提供反向扭矩,将受扭传动轴抱紧。然后,在被测传动装置的位置上反向串接标准扭矩传感器和大转矩动力输出装置。最后,通过动力输出装置输出扭矩,同时读取标准扭矩传感器和被校转矩转速传感器的数值,实现对试验台的原位校准。试验台转矩原位校准原理如图1所示。

图1 试验台转矩原位校准原理Fig.1 Schematic diagram of torque in-situ calibration for test bench
1.2 结构设计
根据无损连接制动系统工作原理及现场条件,确定整套系统设计的总体目标是:1)抱紧力值大,制动能力强,且不能对传动轴造成损伤;2)适合现场狭小空间使用,体积小、重量轻,方便移动和固定;3)适用于不同试验台,不同高度、不同直径输出轴的抱紧和制动;4)安装方便,操作简单,安全可靠。从系统设计的总体目标出发,综合考虑系统的结构稳定性和使用安全性等多方面因素,确定了双臂结构无损连接制动系统的设计方案,如图2所示。

图2 双臂结构无损连接制动系统Fig.2 Nondestructive connection brake system with two-armstructure
双臂结构无损连接制动系统由抱紧和制动两部分组成。抱紧部分由上抱紧臂、下抱紧臂和抱紧螺栓组成,通过拧紧抱紧螺栓,将传动轴抱紧。制动部分由制动螺栓和液压装置组成,当传动轴承受纯扭转大转矩动力输出装置输出的标准转矩时,无损连接制动系统产生反向转矩将传动轴抱紧制动。无损连接制动系统通过安装在抱紧螺栓下面的垫片传感器的示值调整抱紧螺栓的拧紧力,同时根据加载扭矩的大小调整液压装置的位置,能够使传动轴的抱紧力与加载扭矩相匹配,尽可能减小对传动轴的损伤,实现了抱紧力的精准控制,达到无损连接制动的目的。
2 无损连接制动系统设计计算与选型分析
2.1 抱紧臂材料选择
为防止抱紧臂在大力值抱紧时损伤传动轴,抱紧装置的材料硬度应远低于传动轴的硬度。通过查阅试验台资料可知,传动轴材料为35CrMo合金结构钢,硬度为HRC40~45。因此,选用硬度值低、性价比高的Q235普通碳素结构钢作为抱紧臂材料。
2.2 下抱紧臂长度方向尺寸设计
下抱紧臂既要和上抱紧臂连接,抱紧传动轴,又要与制动部件连接承受拉、压力,是装置的重要部件,且适合于现场狭小空间使用,应优先确定。通过对型号为CH1000传动箱试验台现场测量可知,传动轴直径Φ=为240mm,轴长L为300 mm,距地面高度H为800 mm,最大转矩为30000 N·m。据此设计下抱紧臂尺寸如图3所示。

图3 下抱紧臂长度方向尺寸Fig.3 Length dimension of lower holding arm
2.3 制动部分液压装置规格确定
根据下抱紧臂长度方向尺寸,对其进行受力分析,如图4所示。

图4 制动部分受力分析Fig.4 Force analysisof the braking part
根据静力学定律[10-11],当施加载荷平衡时

式中:∑F为平衡状态下受力总和,N;∑M为刚体力矩总和,N·m;
通过分析图5得出

式中:F拉为螺栓承担的拉力,N;F压为液压装置承担的压力,N。
求解

根据式

可以求得m为2470 kg。
因此,压向液压装置选用5t量程即可。
2.4 制动螺栓的型号/规格确定
制动螺栓选用性能等级为6.9级的螺栓[12],螺栓的抗拉强度σ为

屈强比为0.9,公称屈服强度σs为

根据压强公式

螺栓的最小截面积S为

螺栓截面积As公式为[12]

式中:As为螺纹的应力截面积,mm2;d2为螺纹中径的基本尺寸,mm;d3为螺纹小径d1减去螺纹原始三角高度(H)的1/6的值,mm。

式中:H为螺纹原始三角形高度(H=0.866025P),mm;P为螺距,mm;d1为螺纹小径的基本尺寸,mm。
将螺栓的最小横截面带入,可以计算出螺纹小径d1与螺纹中径d2之和为

如果选用M16螺栓,M16螺栓小径为13.8 mm,M16螺栓中径为14.7 mm,中径与小径之和远大于15.2 mm。计算结果表明,选用M16螺栓可以满足承压装置使用要求。
2.5 抱紧螺栓的型号/规格选用
抱紧螺栓的型号规格,决定着抱紧力的大小,关系着上下抱紧臂的宽度和垫片传感器的选型。根据国家相关标准要求[13],在施加不同拧紧力时,抱紧臂对主轴的抱紧力计算公式为

式中:Nv为滑移载荷,kN;nf为摩擦面面数;μ为抗滑移系数;为高强度螺栓预紧力之和,kN。
钢的抗滑移系数μ=0.4,摩擦面面数nf=2,试件一侧螺栓数量m=2,10.9级M24的螺栓预紧力为250 kN,液压装置的压力可达500 kN,则高强度螺栓预紧力之和为

由此可得

故螺栓预紧时,Nv=400 kN;液压装置预紧时,Nv=800 kN。
以传动轴直径150 mm为例,若利用高强度螺栓预紧,则滑移转矩Mv=400kN×75mm=30000N·m。若转矩值超出30000 N·m的范围,可采用液压装置抱紧,此时的最大滑移转矩可增大至60000 N·m。
在施扭时,输出轴转矩通过制动装置转化成拉力和压力的输出(一端压力,另一端拉力),压力端通过液压装置承压,拉力端通过螺栓承拉。液压装置和螺栓均固定在槽钢上,力臂为0.5 m,螺栓和液压装置承受的拉压力在60 kN左右。
通过分析可知,10.9级M18螺栓拧紧力为200 kN时,即可承受30000 N·m的转矩将传动轴抱紧。因此,选用10.9级M18的抱紧螺栓。
2.6 垫片传感器的型号/规格选用
为了达到精准控制和实时监测抱紧力的目的,实现在满足制动要求的同时不损伤传动轴,专门设计了带有垫片传感器的抱紧螺栓。垫片传感器在无损连接制动系统中的安装位置如图5所示。10.9级M18的螺栓拧紧力为200 kN,考虑到垫片传感器的承压、过载和安装[14-16],则选用内径为20 mm,最大试验力为300 kN的垫片传感器,如图6所示。
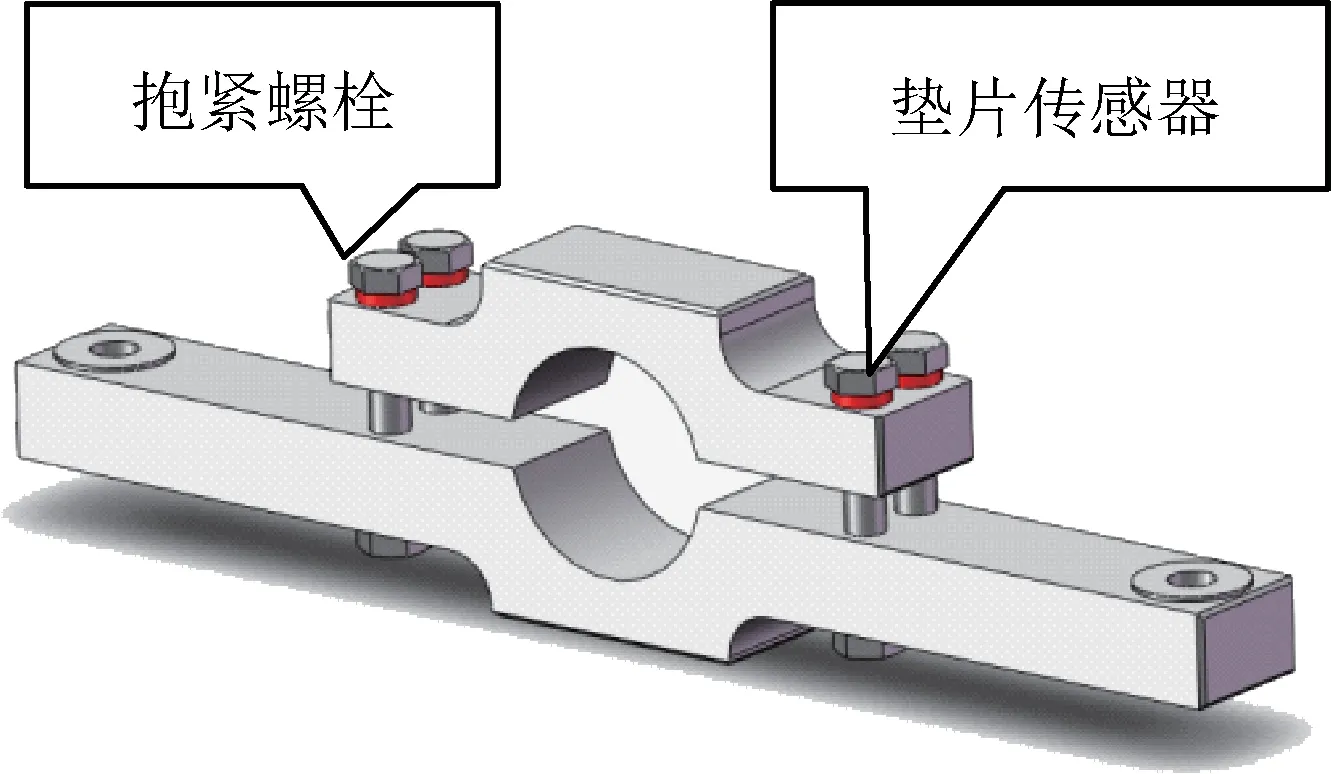
图5 无损连接制动系统示意图Fig.5 Schematic diagram of the nondestructive connection brake device
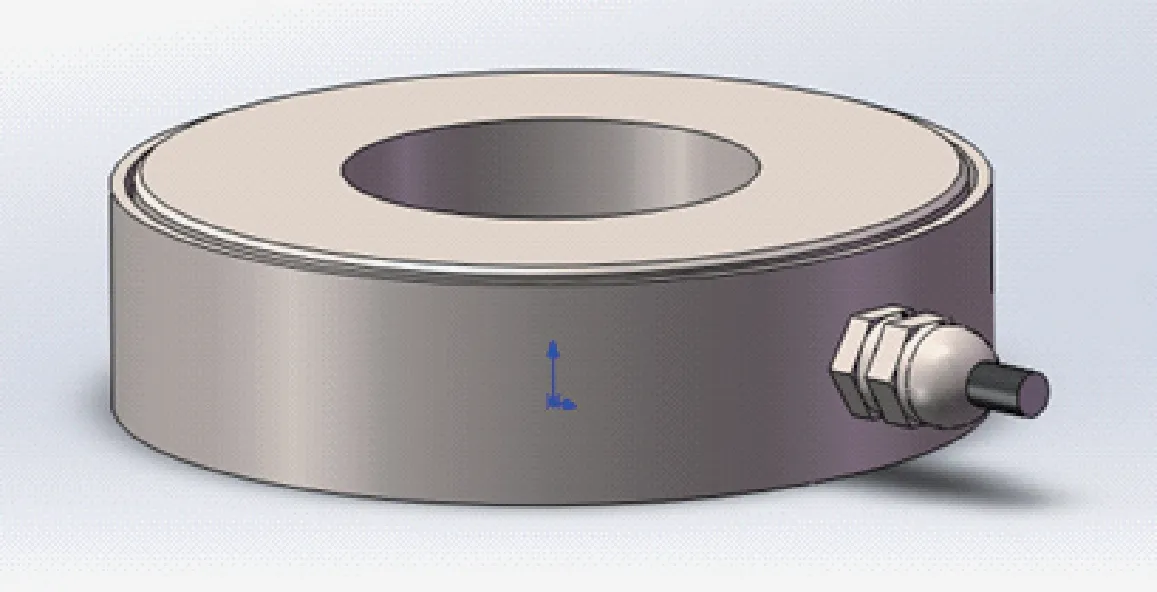
图6 垫片传感器Fig.6 Gasket transducer
3 无损连接制动系统验证试验
为实现对抱紧力的精准控制,确定装置承载扭矩值与预紧力值之间的关系,使用测量范围为3000~30000 N·m,准确度为0.3%的静校试验台对工艺轴进行模拟试验。试验方法为:
首先,将工艺轴的一端通过花键与静校试验台加载端连接,另一端通过抱紧螺栓、垫片传感器与上、下抱紧臂连接,拧紧抱紧螺栓抱紧传动轴。将制动螺栓和液压装置与下抱紧臂连接。全部连接固定好后,将垫片传感器与显示仪表连接,接通电源。然后,调整静校试验台加载臂至水平,将垫片传感器指示仪表调至零点。将拧紧力矩从50 N·m依次增加至500 N·m拧紧抱紧螺栓,并通过垫片传感器读取抱紧力,同时利用砝码、臂杆将加载扭矩逐渐从500 N·m增加至18000 N·m,保持5 min。最后,拆开抱紧装置,卸下砝码。此过程重复进行多次,试验结果见表1。
通过试验验证发现,使用如表1所示的预紧力,结果“未打滑”表示可将传动轴抱紧制动,而且通过粗糙度仪和探伤仪检测,工艺轴的外观和内部结构完好,即实现了无损连接制动。图7所示为工艺轴加载扭矩与抱紧螺栓预紧力之间的对应关系。从图中可以看出,在满足制动要求且不损伤传动轴的情况下,工艺轴加载扭矩与抱紧螺栓预紧力之间满足如下关系,即y=20.76+0.01x-1.42×10-7x2。其中,y表示抱紧螺栓预紧力,x表示工艺轴加载扭矩。根据这一关系式,可以通过计算获得传动轴在任意加载扭矩下实现无损连接制动所需要的抱紧螺栓预紧力。

图7 加载扭矩和预紧力间的对应关系Fig.7 Correlation between loading torque and pretightening force

表1 现场试验结果Tab.1 Field test results
4 结论与展望
本文设计的无损连接制动系统,抱紧力值大,制动能力强,可实现在小于30000 N·m加载条件下对传动轴的无损连接制动,适合现场狭小空间使用,操作简单、安全可靠。同时,通过现场试验验证建立了拧紧力和标准扭矩之间的对应关系(y=20.76+0.01x-1.42×10-7x2),实现了抱紧力的精准控制,达到了无损连接制动的目的。通过本项技术研究,解决了装甲车辆传动装置试验台原位校准难题,为传动装置的性能指标、参数试验验证、质量检验提供了有效的计量保证,对新一代装甲车辆的设计、研制具有十分重要的意义。