面向实时交通仿真的智慧公路运行态势评估与决策技术
2022-04-18吴岚张明丁闪闪
吴岚 张明 丁闪闪







(华设设计集团股份有限公司,江苏 南京 210014)
摘要 实时在线微观交通仿真技术发展对精细化交通管控产生了重要的推动作用。通过构建实时微观交通仿真评价体系,开展路网交通运行态势动态评估及预测;同时,基于动态交通分配的路径规划决策算法支撑路网科学诱导、智能决策。在智慧公路实际道路场景中进行BIM+GIS三维建模,其测试结果与该路段服务水平相近,面向实时交通仿真的公路运行态势评估与决策技术助力公路出行服务效率提升、安全提升。
关键词 实时在线微观交通仿真;运行态势评估;智能决策;效率
中图分类号 U495 文献标识码 A 文章编号 2096-8949(2022)06-0014-03
引言
基于微观实时交通仿真技术模拟物理世界高度逼真的交通运行环境,包括真实车辆行为、交叉口信号控制状态等,利用路网态势评估体系评价各类交通优化方案的实施效果,为交通管理部门提供有效决策依据,有利于实现交通运行管理精细化、科学化、高效化、智慧化的发展[1-2]。随着城市拥堵问题的日渐严重,利用实时微观交通仿真技术进行交通状态推演和管控成为趋势,国内在此方面进行了大量的探索。Giuffrè[3]等研究开发了一种基于单车道环形交叉路口的交通仿真模型,并进行真实案例分析证实其良好的匹配性;魏丽[4]等在微观交通仿真中提出了基于期望车头时距的跟驰模型,开发出模型程序,仿真结果更有效评价了交叉口信号控制策略。但方案研究仅限于单点或小范围路段进行试验,缺少针对大规模路网进行验证。目前实时在线微观交通仿真系统缺乏体系化评价,仿真对公路的实际管理效能不足,针对实时交通仿真的智慧公路评价指标体系、智能决策的数学模型仍有待进一步研究探索和应用。
该文围绕实时在线微观交通仿真应用场景,提出了一套完整的动态评估指标体系和智能决策方法,推进仿真技术在路网管理中的融合应用。
1 路网运行态势评估体系
在建立交通仿真指标前,须对实时交通模型的合理性进行评价,保证模型误差在规定范围内;而后从交叉口、路段两个层面分别进行评价,最后在路网宏观层面评价延误与冲突,以形成微观宏观一体的完整评价体系。
1.1 模型合理性评价
模型合理性评价采用仿真与实测对比的方法进行。具体地,标定一个路段,一方面,利用VISSIM旅行时间测量模块获取仿真运行过程中通过该路段的所有车辆的平均行程时间;另一方面在对应的仿真模拟时段使用测量车,对标定路段进行实际行驶时间测量,最后两者进行对比,误差不得超过10%。即:
式中:——仿真结果误差值;
——在不同随机种子下进行仿真得出平均仿真旅行时间,s;
——在对应仿真时段多次实测的平均行驶时间,s。
1.2 交叉口评价
交叉口评价,是根据仿真结果中交叉口整体延误时间来判定其服务水平。在不同随机种子下进行模型仿真,得到多组延误数据,整合计算,进而得到最终的交叉口整体延误时间;最后,通过延误时间判断交叉口的服务水平等级,输出评价结果。
式中:——交叉口整体延误时间,s;
——第i组仿真该交叉口延误时间,s;
——第i组仿真该交叉口通过总流量,veh。
1.3 路段评价
通过评价路段服务水平,来快速有效地把控运行效率,出现问题,能及时发现,采取控制匝道、小区流量汇入的措施,保证主路运行通畅。按《HCM2010》划分道路,保证每个路段只有一种类型,具体里程不作要求。根据对各路段仿真评价结果中的路段交通流量、平均速度进行分析,获得路段交通密度,进而判断路段交通服务水平。
式中:K——该路段交通流密度,veh/km;
Q——该路段仿真总流量,veh;
——该路段仿真通过车辆平均行驶速度,km/h。
1.4 路网延误评价
对仿真区域内整体路网延误进行评价,是为了最快地从宏观层面了解整体路网交通运行情况,从整体角度出发,关注全局通行能力,这有利于管理部门更有效地调整交通资源,保证管辖区域内整体交通运行稳定。路网评价,主要依赖延误指数,延误指数越高,整体交通服务水平越差。
延误指数,即道路交通实际通行时间与理想顺畅状态下通行时间的比值。一般畅通状态下的通行时间,是仿真夜间车辆通行所获得的。即:
式中:——延误指数;
——当前时刻仿真路网内某路段车辆行程时间;
——畅通状态下仿真路网内某路段车辆行程时间。
1.5 路网冲突评价
通过结合微观交通仿真软件与仿真冲突分析软件SSAM(Surrogate Safety Assessment Model的简称),根据分析得到的仿真冲突代替历史事故和现场交通冲突对交通设施进行安全评价,从而间接进行交通安全评价。
与现实情况下的交通冲突概念相類似,仿真冲突是指在仿真模型中两辆车辆在相互冲突的轨迹上运行,由于其中一辆车或者两辆车同时采取了避险行为而没有发生仿真事故的事件。根据仿真冲突的形成过程特点,SSAM根据仿真车辆TTC(Time-to-collision的简称)判断是否存在仿真冲突。TTC指转向车辆离开冲突点到直行车辆保持原有车速和行驶方向到达冲突点的时间差。TTC阈值可在运行SSAM前根据实际需要进行修改,其默认值为1.5 s,而当TTC值大于1.5 s时,认为两车之间没有发生冲突(如图1所示)。
2 智能化决策技术研究
2.1 决策支持基础——动态交通分配模型
动态交通分配是智能化决策技术的关键,根据不同路网交通承载能力将交通需求分配到最优路径上,实现不同路网交通优化目标。动态交通分配模型主要分为离线版和在线版,离线版动态交通分配通常用于优化与评估交通规划和交通管理方案;在线版动态交通分配更偏重于路网实时信息的估计和预测。
2.2 A*最短路径规划算法
A*最短路径规划算法主要采用优先搜索算法来寻找单起始点单目的点的最短路径。相比于Dijkstra 算法,具有更好的执行效率。该算法通过距离和权重组成的函数来决定搜索的优先顺序。在搜索过程中,该算法优先选择高权重的路径,并重复搜索,直至最短路径出现为止。
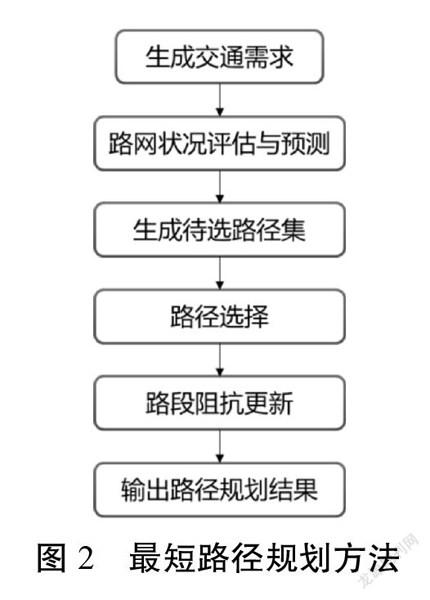
2.3 基于动态交通分配的路径规划决策
基于动态交通分配的路径规划决策在路径规划过程中引入动态交通信息,进行路网状况与预测,使得该决策算法更具有动态性;利用微观交通仿真软件对车辆行驶行为进行模拟,得以反映动态交通分配模型中不同类型车辆之间在行驶过程中的相互影响,使得该决策算法更具有全面性。因此,算法具有更实时的数据支撑和模型推演,从而获得更准确的路径规划结果(如图2所示)。
3 研究成果示范应用
案例选取S342无锡段智慧公路科技示范工程为应用对象,该路段为已建大流量普通国省道,是江苏省干线公路快速骨架网“四纵八横”中的一部分,作为苏南、苏皖重要通道对支撑长三角一体化高质量发展起到重要作用。示范路段全线位于无锡,共计52.75 km,其中与312国道共线段13 km,共线段与全国最繁忙的沪宁高速公路平行。现构建该区域的BIM+GIS实时交通仿真路网模型,形成动态评价指标和决策方法,支撑路网应急管控。
3.1 三维场景跨平台呈现
实现全线微观交通仿真与三维BIM+GIS平台匹配,利用WebSocket通信技术打通桌面仿真软件与Web前端的链路,基于WebGL可视化技术实现了实时三维交通仿真Web端呈现(如图3所示),将交通仿真软件中的车辆推送至三维BIM+GIS平台,跨平台实现车辆流动,Web前端应用中加载WebGL高精度三维模型数据,建立车辆队列管理器,依据获取到的仿真程序输出结果,实现车辆对象动态生成和移除,同时更新WebGL环境中车辆对象位置姿态,实现仿真计算结果的动态同步。
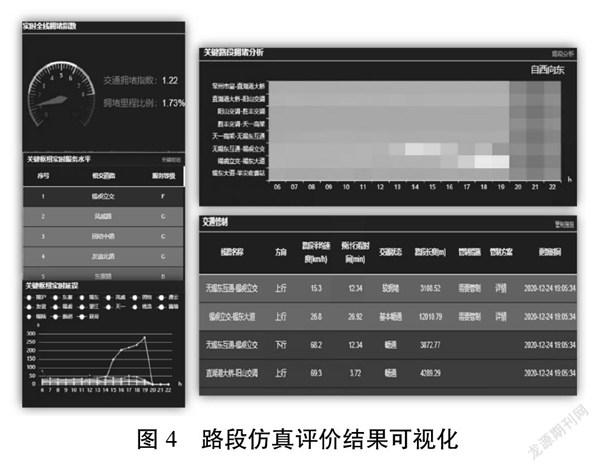
3.2 交通仿真评价指标
基于实时交通仿真评价体系,对交通运行状态深度挖掘,由点及面,对节点、路段、路网等进行剖析,分析其时间、空间上的交通规律,形成实时评价指标(如图4所示),包括延误、排队长度、通行时间等10余项,支撑大规模路网的实时交通管控。同時,结合仿真技术与预测算法,可对路网交通状态进行15/30 min短时交通预测,预测指数涵盖宏观路网、微观路段与交叉口,有助于分析路网未来态势。
3.3 智能决策诱导方案生成
通过智能化的路径决策算法支持,针对拥堵、事故、养护等路网事件,进行动态交通分配,通过科学的路径诱导方案实时发布到平台端,提示路网管理人员向路侧情报板、第三方导航平台等发布出行引导信息,平衡路网交通流量、提升通行效率。以望江立交-锡虞立交为例(如图5所示),仿真系统对该路段态势实时推演拥堵路段态势,平台智能生成决策诱导方案,引导驾驶员绕开主线。
4 结语
该文构建了实时微观交通仿真评价体系,提出了支撑路网科学诱导、智能决策的路径分配算法。并利用构建的路网及外场检测器数据搭建系统平台进行实际应用测试,实现了低延时、长里程的三维高精度交通仿真路网的实时监测、预测和动态预警,形成了完整的公路网定量评价指标体系,使交通管控具备精细的决策分析能力。未来基于该技术可构建更复杂的实时交通仿真路网,结合实际业务需求科学制定基于动态决策能力的科学交通管控和诱导方案,提高普通国省道智慧公路管理效能、提升公路出行服务水平。
参考文献
[1]王松, 黄柯棣, 杨妹. 基于动态数据驱动的交通在线决策[J]. 计算机仿真, 2019(1):167-170.
[2]周勇, 罗佳晨, 陈振武, 等. 基于在线仿真的交通信号管控应用模式思考: 2019年中国城市交通规划年会[C].中国四川成都, 2019.
[3]Giuffrè, O., Granà, A., Tumminello, M.L., Sferlazza, A.Calibrating a microscopic traffic simulation model for roundabouts using genetic algorithms[J]. Journal of Intelligent and Fuzzy Systems, 2018(2): 1791-1806.
[4]魏丽, 孙俊, 商蕾. 微观交通仿真模型建模及应用[J]. 武汉理工大学学报, 2010(4): 793-796+800.
收稿日期:2022-02-17
作者简介:吴岚(1986—),女,硕士,高级工程师,研究方向:智能感知、交通仿真、交通控制和交通安全。