城市轨道交通 ATO 停车精度改进分析
2022-04-16任培勇
任培勇
(南京恩瑞特实业有限公司,江苏南京 211106)
1 引言
列车自动运行(ATO)子系统一般采用高可靠性的冗余硬件结构和软件设计,采用均质棒列车模型对列车速度实现实时预测和闭环控制,确保列车运行的准点性、节能性和舒适性,实现精确停车。ATO系统是在列车自动防护(ATP)子系统的安全防护下,根据列车自动监控(ATS)子系统提供的运营信息自动控制列车运行,保证列车能够精确停车(停在±0.3 m范围内的概率为99.995%)。在某信号系统调试过程中,多列车陆续发生了以ATO模式进站欠标和冲标的问题。针对此问题,文章结合车辆各专业进行多方面分析、优化和调整,提出整体改进方案。
2 停车精度影响因素分析
2.1 调试初期停车精度统计
调试前期,通过对ATO停车欠标、冲标情况进行统计和分析,发现停在±0.3 m范围内的概率仅为86.6549%,不满足指标要求。经分析,影响ATO停车精度的原因主要包括:车辆闸瓦磨合不到位、电空转换参数不合理、气制动参数不合理、线路附加阻力不确定、ATO测量减速度偏差较大和ATO控制算法不完备等。
2.2 车辆制动性能
车辆系统制动性能的稳定性是ATO精确停车的前提,下面从整体制动响应、制动电空转换过程、纯气制动响应等方面对车辆制动系统的制动性能展开分析。
(1)整体制动响应。列车100%级位对应的制动减速度应为1.0 m/s2,当ATO输出80%的级位时,期望减速度为0.8 m/s2,而实际列车响应的减速度偏大(实测值为1.03 m/s2),容易造成对位停车欠标,如图1所示。经分析,出现该情况的原因为闸瓦磨合不到位。

图1 整体制动响应示意图(改进前)
(2)制动电空转换过程。由图2可知,电制动力在8 km/h左右开始退出,且电制动力退出斜率较大(列车超员工况下为4×82 500 N/s);但此时气制动响应偏慢,导致制动响应不及时,容易造成冲标。
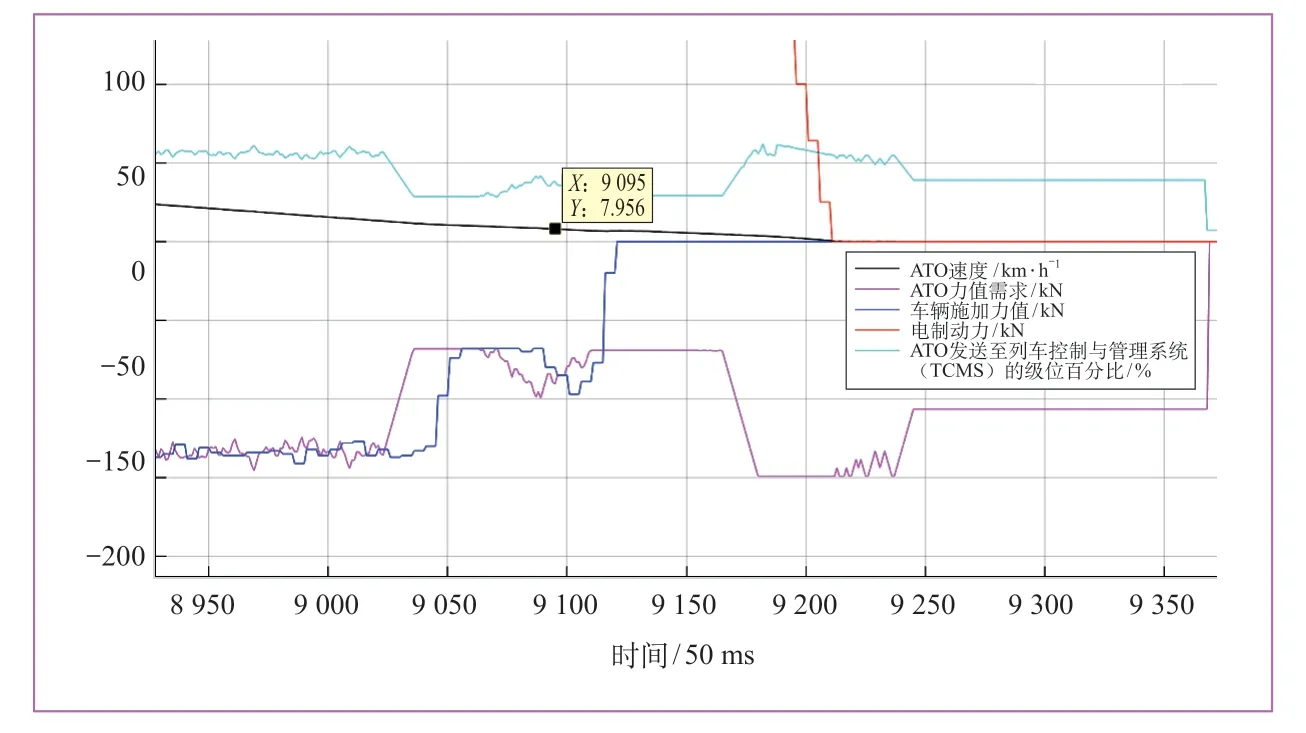
图2 制动电空转换-电制动退出过程示意图(改进前)
(3)纯气制动响应。通过对图3中速度传感器(MVU)测量减速度的分析可知,在车辆由电空混合制动转为纯气制动时,响应的制动减速度偏大(计算得到最大制动减速度可达1.59 m/s2),使得列车速度迅速下降,而气制动本身响应较慢,在最后停车阶段不能及时响应ATO调整后的小级位,导致列车停车欠标。
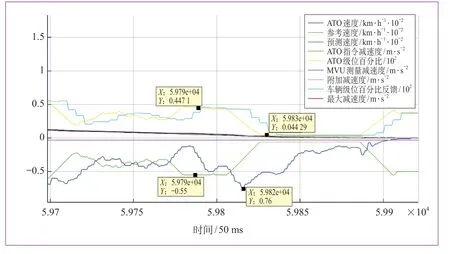
图3 纯气制动响应示意图(改进前)
2.3 线路条件
通过对实际运行数据进行统计,发现ATO的停车精度会因站台的差异存在统一超前或滞后的情况,由此可推断站台线路坡度配置数据与实际存在偏差。
2.4 信号系统
(1)减速度测量异常。由于信号车载设备使用的测速雷达补偿较大,低速时雷达测量减速度产生波动会引起MVU测量减速度异常(产生延时较小的减速度),而ATO采用了ATP减速度(延时较大的减速度),从而导致冲标,如图4所示。

图4 MVU测量减速度示意图(改进前)
(2)ATO控制方式。ATO在停车阶段控制级位变化幅度较大,导致控车平稳性欠佳,在一定程度上影响了停车精度,如图5所示。
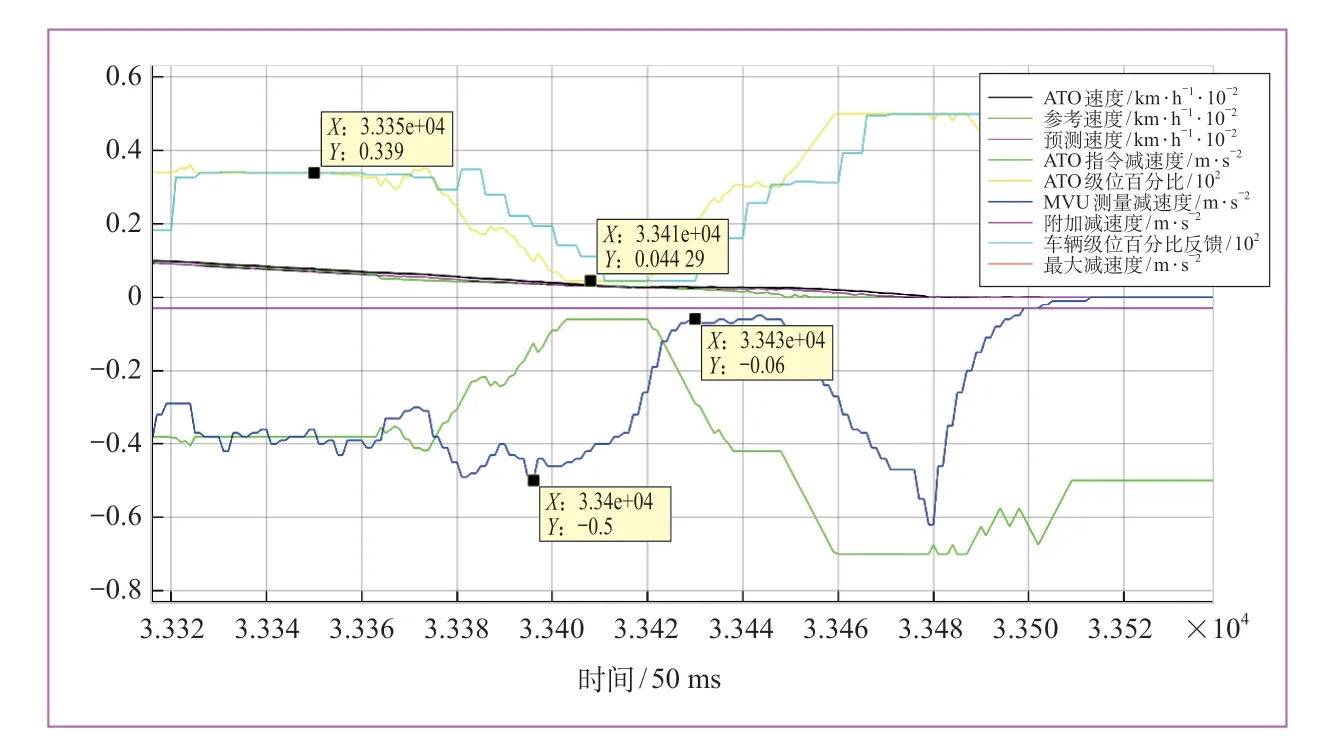
图5 ATO停车阶段级位输出示意图(改进前)
3 改进措施
3.1 制动性能的改进
(1)闸瓦磨合。通过对所有列车进行充分的闸瓦磨合试验,闸瓦充分磨合后的车辆整体制动响应如图6所示。由图可知,经过充分磨合后的闸瓦制动响应性能满足要求。

图6 整体制动响应(闸瓦充分磨合后)
(2)电空转换参数调整。对车辆网络管理系统进行参数调整,将ATO模式下电空转换起始速度从8 km/h修改为4 km/h,同时将电制动退出延时时间由340 ms修改为560 ms,改进后的电控转换制动响应如图7所示。由图可知,经过参数调整后的电控转换制动响应性能满足要求。确保车辆制动性能与其他列车保持较好的一致性;同时建议车辆系统整体考虑减小30%和40%固定级位下的恒定减速度偏差;目前所有的数据统计和分析都是基于空载(AW0)下进行的,需车辆确认重载(AW2)和满载(AW3)情况下制动特性是否与AW0有较好的一致性,避免后续因载重的差异引起停车精度的偏离。车辆制动系统据此建议进行了参数调整,将预压力施加速度点从8 km/h更改至10 km/h,电空混合过程中,气制动力值从75%削减至70%。改进后,低速气制动响应值基本满足要求。

图7 电空转换阶段制动响应示意图(改进后)
3.2 ATO 控制优化
(3)气制动参数调整。为解决气制动性能较差导致列车停车精度不满足指标要求的问题,同时进一步提高和确保所有列车的整体停车精度,对车辆提出以下建议:对车辆制动性能较差的列车进行调查分析和处理,
3.2.1 增加线路特性补偿
根据不同站台的线路条件差异,进行线路附加阻力减速度差异性补偿,增加配置文件并对ATO相关控制方案进行优化。增加线路特性补偿后,列车减速度跟随性有较好提升,如图8所示。

图8 列车减速度跟随性提升示意图
3.2.2 优化测速补偿参数
在列车低速运行时,减小测速雷达测量减速度的补偿参数,使ATO控制使用的测量减速度始终为延时较小的MVU测量减速度。补偿处理后,使用的测量减速度精度有所提升,如图9所示。

图9 MVU测量减速度示意图(改进后)
3.2.3 优化 ATO 控制算法
根据上文的解决方案,在车辆专业和测速测距系统优化和调整后,对ATO停车控制策略进行了优化。整体控制策略采用减速度“模糊预测比例积分控制器(PI) +恒量约束”的控制算法,具体控制过程如下。
(1)当速度v≥16.5 km/h时。目标制动减速度为0.78 m/s2,车辆最大制动减速度限定为1.15 m/s2。
(2)当6.5 km/h<v<16.5 km/h时。目标制动减速度为0.54 m/s2,车辆最大制动减速度限定为1.15 m/s2;当列车到站台停车点的距离小于8 m时,车辆最大制动减速度限定为0.54 m/s2,车辆最小制动减速度限定为0.35 m/s2,同时进行线路附加阻力减速度差异性补偿。
(3)当4.8 km/h<v≤6.5 km/h时。车辆最大响应制动减速度设置为恒定值1.15 m/s2,恒量约束减速度输出值(根据速度和距离查表确定,保证输出级位在35.1%~43.5%范围内)。
(4)当0 km/h<v≤4.8 km/h时。车辆最大响应制动减速度根据预测速度线性差值计算得到(1.15~1.48 m/s2),ATO输出减速度通过结合速度和距离计算获取,恒量约束幅值为0.017 6 m/s2。
(5)当列车到站台停车点的距离小于60 cm时。车辆最大响应制动减速度根据预测速度线性差值计算得到(1.15~1.48 m/s2),ATO输出减速度为恒定值0.8 m/s2。控车算法优化后的ATO控制级位如图10所示,可见控车的平稳性得到了较大提升。

图10 ATO控制级位示意图(改进后)
4 改进效果
经过持续改进,以上调整策略取得了良好效果, 实际运营中ATO在站台的停车误差满足在±30 cm范围内的概率不小于99.995%、在±50 cm范围内的概率不小于99.999 8%的停车精度要求,如图11所示。

图11 停车精度统计结果
改进后,ATO子系统不仅能够自动控制列车在实体站站内精确停车,同时ATO子系统也可实现列车在折返线和停车线的精确停车。
列车进站时,在进站停车过程中,考虑到运行舒适度与行车效率,ATO子系统计算出高效且冲击率较小的一次性制动曲线,同时进站过程中采用一次连续制动模式制动至目标停车点,中途制动不缓解。
列车到站精确停车后,ATO子系统输出保持制动命令至车辆,由车辆施加保持制动,防止溜车的发生。停站过程中,若列车处于自动驾驶模式(AM)下,则ATO子系统将持续输出保持制动命令。
列车启动后,ATO子系统在输出牵引命令及级位时取消保持制动命令的输出,保持制动的真正缓解由车辆负责,即ATO子系统取消保持制动命令输出时,车辆并不会立即缓解保持制动,而是在保证牵引力足以控制列车前进时才真正缓解保持制动。
5 结论
ATO无法定位停车是城市轨道交通信号系统调试过程中的常见问题,ATO的停车精度受车辆制动电空转换执行情况、气制动性能、测速精度、线路条件以及ATO控车策略的多重影响。发生ATO定位停车不准的问题时,需结合现场运行数据对影响停车精度的因素进行多方面分析排查及协调改进,以达到较好的停车效果。
此改进方案已在南昌地铁3号线信号系统ATO中得到了应用,此方案能够有效解决项目中停车精度欠佳的问题,为后续此线路的高效运营奠定了基础;同时,通过对信号ATO系统调试工作的研究,为今后新建设和改造项目中ATO系统的应用提供参考。
