基于LiDAR的果园对靶变量喷药控制系统设计与试验
2022-04-16窦汉杰翟长远陈立平
窦汉杰,翟长远,王 秀,邹 伟,李 琪,陈立平※
(1. 西北农林科技大学机械与电子工程学院,杨凌 712100;2. 北京市农林科学院智能装备技术研究中心,北京 100097;3. 国家农业智能装备工程技术研究中心,北京 100097)
0 引 言
农药喷洒是果园病虫害防治的主要方式,可减少66%~90%果品损失。果园风送喷药技术是联合国粮农组织推荐的一种高效施药技术,已在果园病虫害防治中得到广泛应用。传统的果园风送喷药采用连续均匀喷药的方式,不仅增加农药使用量,而且多余的农药飘移到空气和地面造成环境污染。为解决这一问题,出现了基于传感器的果园风送对靶变量喷药技术,该技术可根据果树位置、冠层体积、枝叶稠密度等特征信息进行变量喷药,大大减少农药用量。
目前,果园风送对靶喷药采用的传感器主要有红外、超声和激光雷达(Light Detection And Ranging, LiDAR)传感器。红外传感器是最早用于果园对靶喷药的传感器,其通过探测果树树干或树冠位置控制喷头开启时间实现对靶喷药。He等基于红外传感器研发了一种果园精准对靶喷药控制系统,该系统可节约50%~75%的农药使用量。翟长远等采用探测树干估算树冠位置的方法,使用红外传感器设计了幼树靶标探测器。李丽等采用红外传感器实时探测果园靶标位置,并根据探测结果实施对靶喷药控制。由于红外对靶喷药只能根据果树有无进行选择性喷药,无法根据果树冠层体积和枝叶稠密度进行变量喷药,基于超声传感的对靶喷药技术出现。Maghsoudi等运用超声波传感器实时获取果树靶标冠层体积,并基于冠层体积变化进行变量喷药,相比传统喷药平均节省了34.5%的药量。Gil等基于超声波传感器研发了一种可根据果树冠层体积变化进行变量喷药的果园喷雾机,可节约21.9%农药使用量。姜红花等基于超声波传感器研发履带自走式果园自动对靶风送喷雾机,可实现大于30%的药量节约。相比红外和超声波传感器,LiDAR能获取更多的果树特征信息。Liu等基于270°LiDAR和速度传感器开发了可根据双侧果树特征信息和作业速度进行喷药量调控的喷药控制系统,可节约超过50%的农药使用量。Zhu等基于LiDAR研发了果园对靶喷药机,并与传统喷药机进行对比试验,该机不仅可减少农药使用量,而且病虫害防治效果更好。Cai等基于LiDAR获取的果树冠层点云数据建立了冠层体积网格化计算模型,冠层体积计算相对误差小于5%。并基于该模型研发了果园对靶变量喷雾机,可根据果树冠层体积变化实现对靶变量喷药。Li等基于LiDAR研发了可根据果树冠层体积进行喷药量和风量调控的喷雾机,在0.8 m/s作业速度下,风量和药量的联合调控可进一步提高农药利用率。张美娜等基于LiDAR提出果树靶标叶面积密度计算方法,并基于该方法研发基于靶标叶面积密度参数的喷雾控制系统。江世界等基于LiDAR研发果园喷雾机器人靶标探测与追踪系统,可适应不同形态果树中下部对靶施药需求。
综上所述,LiDAR在果树特征信息获取方面具有明显优势,研究表明,激光对靶精准施药技术可节约农药用量60%~67%、施药时间27%~32%、劳动力和化学燃料28%,每年可节约杀虫剂使用成本1 420~1 750美元/hm。但由于LiDAR需要高性能处理器进行点云数据处理,且不同类型果树的冠层特征信息探测模型存在差异和不同类型果园喷药机喷药控制模型存在差异。目前国内外关于激光对靶精准施药技术的研究整体上处于样机研发阶段,尚未形成商业化应用。本文以塔式果园风送喷雾机为研究对象,采用CAN总线、PWM控制和比例积分微分(Proportion Integration Differentiation,PID)控制技术研发果园对靶变量喷药控制系统,获得常规果园风送喷药作业速度1 m/s下喷药延时补偿距离和最佳网格宽度,并基于对靶控制原理提出对靶喷药控制精度检测方法,通过试验对系统性能进行评价,为后续开展果园激光对靶变量喷药技术研究提供参考。
1 系统设计
1.1 系统硬件构成
本研究选用南通黄海药械有限公司生产的3WG-1200A型果园风送喷雾机作为试验样机,该喷雾机出风口采用塔式结构,喷洒幅宽大于20 m,喷药流量在20~70 L/min,出风口最大风速为23 m/s,适用于苹果园、桃园和樱桃园等喷药作业。
如图1所示,系统主要由LiDAR、工业平板电脑、喷药流量控制器(Spray Flow Controller,SFC)、电磁阀、控制阀组和测速装置等组成。其中控制阀组安装在喷药管路系统中,由调压阀和流量传感器组成,流量传感器选用宁波市力成农用喷雾技术有限公司生产的FT-100型流量传感器,流量范围2~100 L/min,最大压力2 MPa,脉冲信号输出,1 L流量输出136个脉冲,误差±2%,可实时监测管路系统流量。SFC根据系统压力变化控制调压阀的开度大小实现系统压力调节;SFC基于单片机STM32F105R8T6最小系统和多路固态继电器模块实现对喷头流量的PWM控制,每路SFC可独立控制5路电磁阀工作,同时支持CAN总线和RS232通讯,可通过CAN总线实现与工业平板电脑通讯;测速装置由测速码盘和光电传感器组成,通过光电传感器测量喷药机车轮内侧测速码盘转动频率实现作业速度测量;LiDAR采用德国SICK公司生产的LMS10100系列二维激光雷达,角度扫描范围-45°~225°,可同时获取两侧果树冠层信息,并通过网口实时传输给工业平板电脑;基于C#开发的车载计算机界面可设置LiDAR参数(安装高度、探测距离、距喷头距离、起始检测高度和网格宽度)和实时显示作业信息(冠层体积、作业速度、喷雾压力、实时流量和喷药量)。
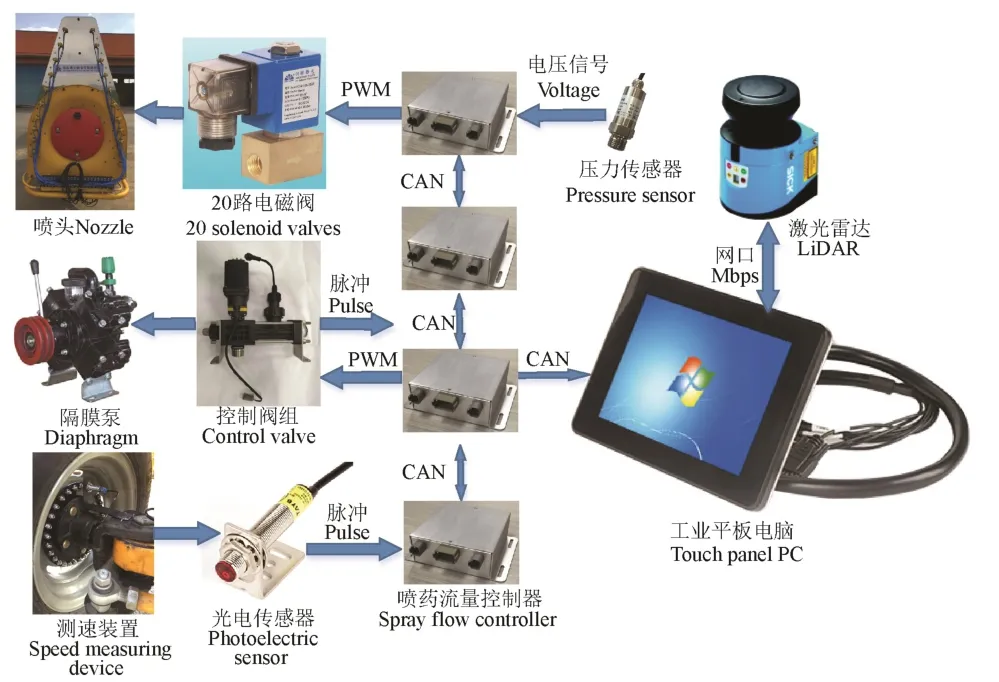
图1 对靶变量喷药控制系统构成Fig.1 Target-oriented variable-rate spraying control system composition
1.2 系统软件设计
果园对靶变量喷药控制系统工作流程如图2所示。
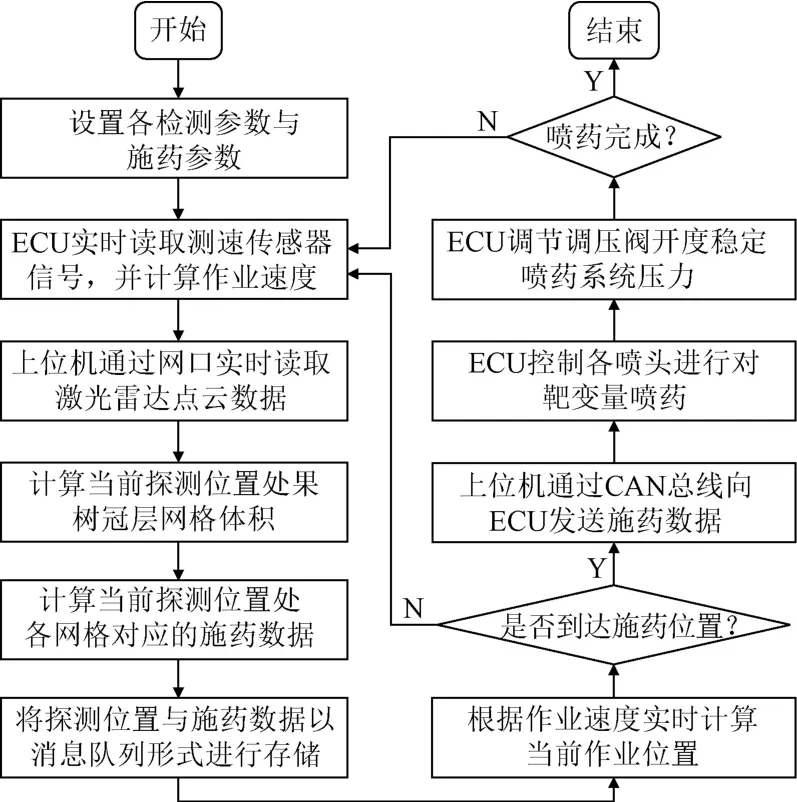
图2 系统工作流程图Fig.2 System flow chart
工作时,安装在喷药机药箱前面的LiDAR实时扫描两侧果树冠层,通过网口将扫描的果树冠层点云数据发送给工业平板电脑,在工业平板电脑上运行的上位机界面读取到点云数据后将通过果树冠层体积计算模型实时计算出不同网格区域内的网格体积,并根据事先建立的药量需求模型计算出不同网格区域内所需药量,药量需求数据将以消息队列的形式进行存储。一旦喷头到达指定位置后,相应位置的药量需求数据将被调出,并通过CAN总线传送给SFC,SFC根据药量需求分别计算出不同位置喷头控制所需PWM值,进而控制不同喷头位置处电磁阀执行相应的动作实现药量按需调控。同时,喷雾系统压力信息会通过压力传感器实时发送给SFC,SFC根据系统压力变化控制调压阀的开度大小进行系统压力调节,确保系统压力稳定。实时喷药量、作业速度、喷雾压力、累计喷药量等信息也会通过SFC实时传送给上位机界面,实现作业数据的实时显示。
1.2.1 果树冠层体积计算
果树冠层体积精确计算是实现精准对靶变量喷药的前提,作者团队前期基于LiDAR提出了一种果树冠层体积计算方法。该方法根据LiDAR到果树行所在平面的检测距离、安装高度、网格高度及宽度等参数条件,建立了果树冠层网格体积计算模型,如式(1)所示。其中,为减小控制系统运算量,提高系统响应速度,取-45°~45°(行走方向左侧)和135°~225°(行走方向右侧)范围内点云数据进行果树冠层体积计算。前期基于该果树冠层体积计算方法开展了果树冠层网格体积在线探测试验,在不同探测速度及网格宽度条件下,针叶型仿真树以及苹果幼树两种树形的总体积最大变异系数分别为7.8%和4.1%,该探测方法具有较高探测精度,可用于果树冠层体积在线探测。
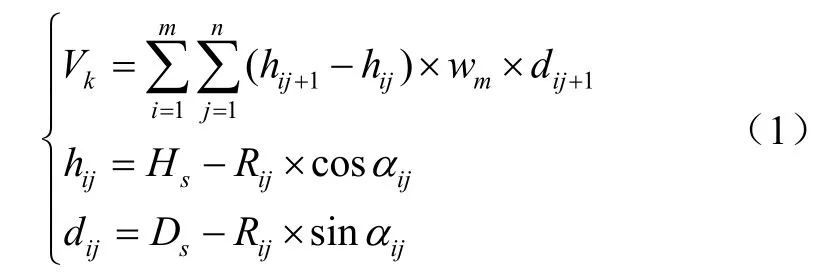
式中V为果树冠层网格体积,mm;为测距序列个数;为测距值个数;为测距序列编号;为测距值编号;h为第个测距序列中第个测距点对应的高度值,mm;d为第个测距序列中第个测距点到果树行所在平面的距离,mm;w为相邻测距序列之间激光雷达行进的距离,即亚网格宽度值,mm;H为激光雷达的安装高度,mm;D为激光雷达到果树行所在平面的检测距离,mm;α为第个测距序列中第个测距点在测距序列中对应的角度值,(°);R为第个测距序列中第个测距点的测距值,mm;为网格组中的网格编号,取1~范围;为网格组中划分的纵向网格个数。
1.2.2 喷头流量PWM控制
喷药机不同位置的喷头对应果树冠层上的喷药范围不同,为实现根据果树冠层体积进行精准对靶变量喷药,需要对不同位置处喷头流量进行独立控制。由于喷药机隔膜泵药液出口到不同位置喷头管路长度不同,各个位置喷头流量控制模型存在差异。为了建立不同位置喷头流量PWM控制模型,进行不同PWM占空比下单喷头流量测量试验,如图3所示。其中,喷头流量使用自行研发的单喷头流量测量装置进行测量。每次试验同时测量喷雾机左右两侧对称位置2个喷头流量,其他位置喷头不工作,将喷头夹子固定在喷头上,使用喷头流量PWM控制软件分别设定PWM占空比(频率为10 Hz)依次为10%、20%、30%、40%、50%、60%、70%、80%和90%,控制电磁阀工作直至稳定后,启动喷药机喷雾系统,通过控制阀组中调压阀调节喷雾系统压力,使其保持为1 MPa。观察流量测量装置流量示数,待流量稳定后记录数据,每组试验重复3次。
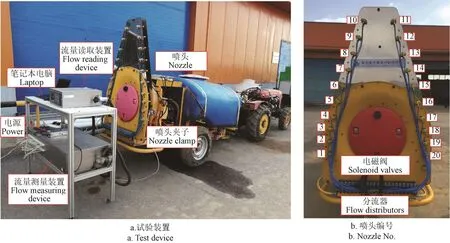
图3 单喷头流量测试Fig.3 Single nozzle flow test
对获取的左右两侧1~20号喷头流量随PWM占空比变化数据进行分析,得出图4所示喷头流量与PWM占空比之间关系。可以看出,喷雾压力1 MPa下,各喷头控制最佳PWM占空比位于0~60%之间;不同位置喷头流量随PWM占空比变化关系存在差异,需建立不同位置喷头流量PWM控制模型进行单喷头流量独立控制。
利用二次多项式函数对各个位置喷头流量与PWM占空比数据进行拟合,获得1~20号喷头流量与PWM占空比关系表达式,如式(2)。

式中为PWM占空比;为喷头流量,L/min;、和为不同位置喷头流量系数关系,各喷头对应参数如表1所示。
为实现喷雾机的喷头流量根据果树冠层网格体积进行实时调节,需要在喷头喷雾范围与冠层各个位置网格范围之间建立一一对应关系,如图5所示。不同位置喷头在果树冠层上喷雾范围由各喷头与水平面的夹角决定,如式(3)。
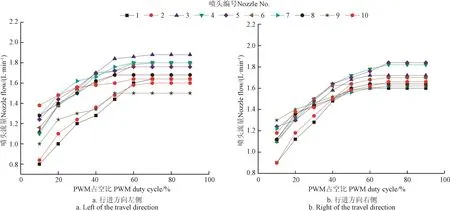
图4 喷头流量与PWM占空比关系Fig.4 The relationship between the nozzle flow and the Pulse Width Modulation(PWM) duty cycle

表1 喷头流量PWM控制模型参数Table 1 Model parameters of nozzles flow PWM control
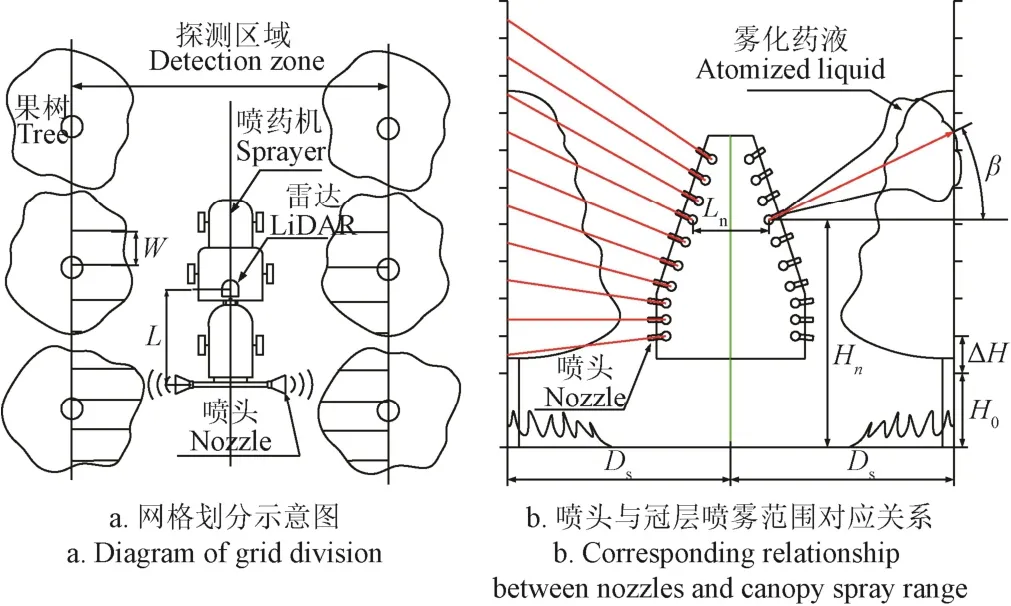
图5 喷头与冠层网格体积对应关系Fig.5 Correspondence between nozzles and canopy grid volume
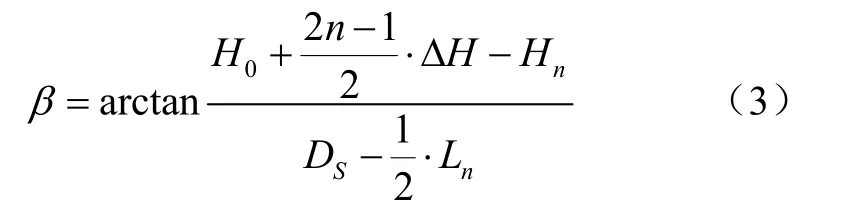
式中L为处于同一高度上的喷头间距,m。
根据喷头流量计算公式和果树冠层网格体积值,得到单一喷头的流量计算公式,如式(4)。

式中为单位冠层体积所需药量,L/m,根据相关研究,将其设定为0.1 L/m;V为网格组中的单一网格体积值,m;Δ为喷头经过网格组中的单一网格体积所需时间,s。
1.2.3 喷雾系统压力PID调控
在单喷头流量调节过程中,喷头开启状态变化会引起喷雾系统压力波动,压力变化影响喷药效果。为减小压力变化影响,基于增量式PID控制方法实现喷雾系统压力调节,控制过程如图6所示。
根据上述PID控制原理,搭建压力调控系统,通过对PID参数的整定,获取PID调节参数,比例系数、积分系数、微分系数分别为1、1和0.01。压力调控系统的稳定时间小于3 s,压力控制偏差小于0.15 MPa。喷药过程中,电磁阀频繁开闭(PWM波动变化时间为0.1 s)会导致喷药系统压力周期性变化,前期试验发现,在带回流搅拌的喷雾系统中,该周期性变化幅度较小。本文PID压力调控对象为喷药系统主管路压力,调控目的是稳定系统某一时间段内压力,不是针对单次PWM调节引起的喷头压力瞬间变化进行调控。因此,PID调控系统响应可以满足要求。

图6 压力PID调控过程Fig.6 Proportion Integration Differentiation (PID) control process of spraying pressure
1.2.4 对靶喷药控制
LiDAR与喷头之间有一定安装距离,当喷头未到达对应喷药位置时,LiDAR获得的果树冠层信息以消息队列形式进行存储。一旦喷头到达对应网格组位置时,消息队列按先入先出调出当前位置对应施药量信息,并发送给SFC,SFC控制对应喷头流量实现对靶喷药。为准确判别喷头是否到达相应的喷药位置,SFC需要实时读取测速装置码盘反馈的脉冲信号,根据脉冲信号数量计算出喷雾机移动距离,如式(5)。

式中为喷雾机移动距离,m;S为测速装置发出一个脉冲喷雾机移动距离,m;为测速装置反馈脉冲数。
测速装置码盘均匀布置,避免喷药机运行速度参与计算,降低了喷药机移动距离计算误差。由于喷头开闭存在延时,为提高系统对靶喷药精度,加入延时补偿算法。整个对靶喷药控制过程如图7所示。喷药过程中,SFC根据测速装置反馈脉冲信号实时计算喷药机移动距离,并同LiDAR与喷头之间安装距离进行比较。当大于时,表明喷药机喷头已到达对应网格组位置,上位机控制程序向SFC发送当前位置所需喷药量信息,SFC根据喷药量信息控制不同位置喷头流量实现对靶变量喷药。完成当前位置喷药后,当前位置喷药量和探测位置信息被释放,SFC开始新的喷药机移动距离计算,当满足喷头开启条件时,按照上述过程完成对靶变量喷药。

图7 对靶变量喷药控制流程Fig.7 Target-oriented variable-rate spraying control process
1.2.5 通信协议
由于需要独立控制20路喷头流量,控制指令相对复杂,为了规范果园喷药作业,采用ISO 11783串行控制和通信数据网络总线标准制定通讯协议。
对果园风送对靶变量喷药控制系统而言,由于单个数据帧最多包含8个字节数据,考虑到后续多源信息扩展的传输需求,根据ISO 11783-3:2014规定,本协议采用多包消息的方式,将报文参数组编号(Parameter group No.,PGN)的数据信息,包含作业速度、喷雾压力、实时流量和喷药量等数据分包发送。其中,将每个包数据域首字节定义为数据包序列号,并按递增顺序发送。由于最多可分配255个序列号,可满足果园喷药作业信息扩展需求。参照ISO 11783-7:2015对机具消息应用层的规定,制订表2所示果园风送对靶变量喷雾机相关参数的报文,如定义喷雾机作业启停控制的PGN为00F401,更新周期为100 ms,字节长度为8字节(bytes)。其中,字节1、2表示作业速度校核指令;字节3、4表示开始作业指令;字节5、6表示停止作业指令;其余未定义位保留。
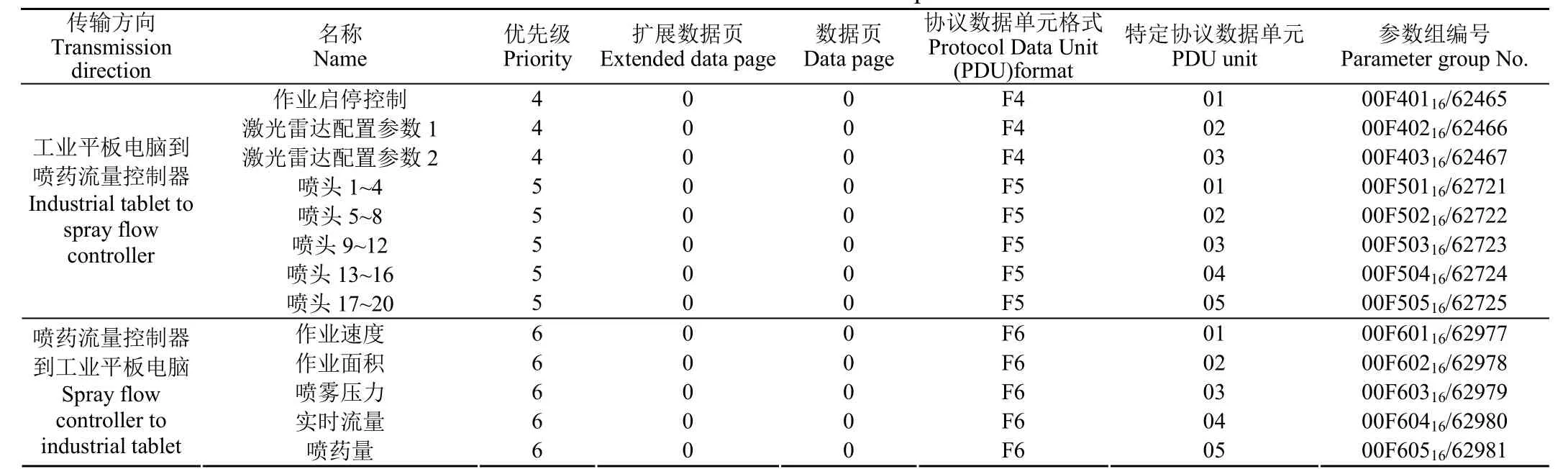
表2 CAN通讯协议Table 2 CAN communication protocol
1.2.6 上位机控制界面设计
基于C#语言开发果园精准对靶变量喷药控制系统上位机界面,如图8所示。该界面可进行LiDAR安装高度、探测距离、距喷头距离、起始检测高度和网格宽度参数的设置,可实时显示不同网格冠层内网格体积、作业速度、喷雾压力、实时流量和喷药量信息,同时可进行LiDAR网口通讯参数和流量控制器通讯参数的设置。测速装置进行不同类型作业机具速度测量时会存在一定误差,为了提高作业速度测量精度,在上位机界面中增加了速度校准功能。速度校准中首先设定校准距离,在校准距离起始和停止位置分别点击“开始校准”和“停止校准”按钮,SFC会记录测速传感器发出的脉冲数,并结合设定网格宽度计算喷药机每移动1个网格宽度对应脉冲数,将该值作为修正值发送给SFC,完成速度校准。
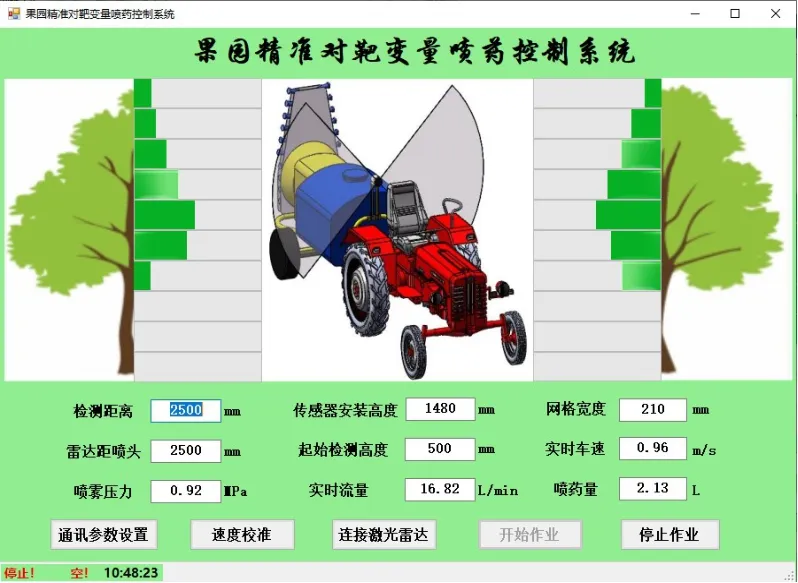
图8 上位机界面Fig.8 PC interface
2 性能试验
2.1 喷头开闭时间测量
在进行对靶喷药时,喷头开闭存在延时,延时时间影响对靶控制精度。为测量在真实喷药环境下喷头开闭时间,在实验室搭建单喷头喷雾系统,如图9所示。
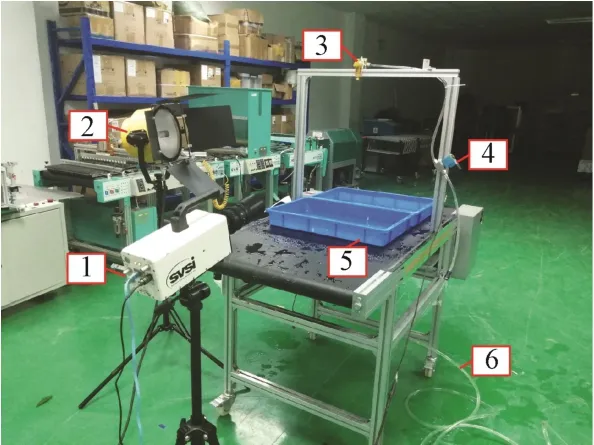
图9 喷头开闭时间测量试验Fig.9 Measurement tests of nozzle opening and closing time
喷雾系统采用微型高压隔膜泵(DP-150,上海新西山实业有限公司),最大流量5.3 L/min,最大压力1 MPa。试验过程中,调节喷雾系统压力为1 MPa,通过喷头流量PWM控制软件分别设定PWM占空比为0、100%控制电磁阀关闭与开启,每次试验重复开闭喷头3次,使用美国SVSI公司GigaView高分辨率高速相机对喷头开闭过程进行拍摄(500帧/s)。拍摄结束后,使用配套软件对喷头开闭过程进行分析,截取喷头从关闭到完全打开和喷头打开到关闭全过程视频,分析计算出喷头开闭时间,如图10所示。最终分析获得喷头开启时间为0.112 s,喷头关闭时间为0.08 s。基于喷头开闭时间,在对靶变量喷药控制系统中加入延时补偿。取喷头开闭时间的平均值(0.096 s)作为延时补偿时间。果园风送喷药常规作业速度一般选择为1 m/s,则延时补偿距离为96 mm。
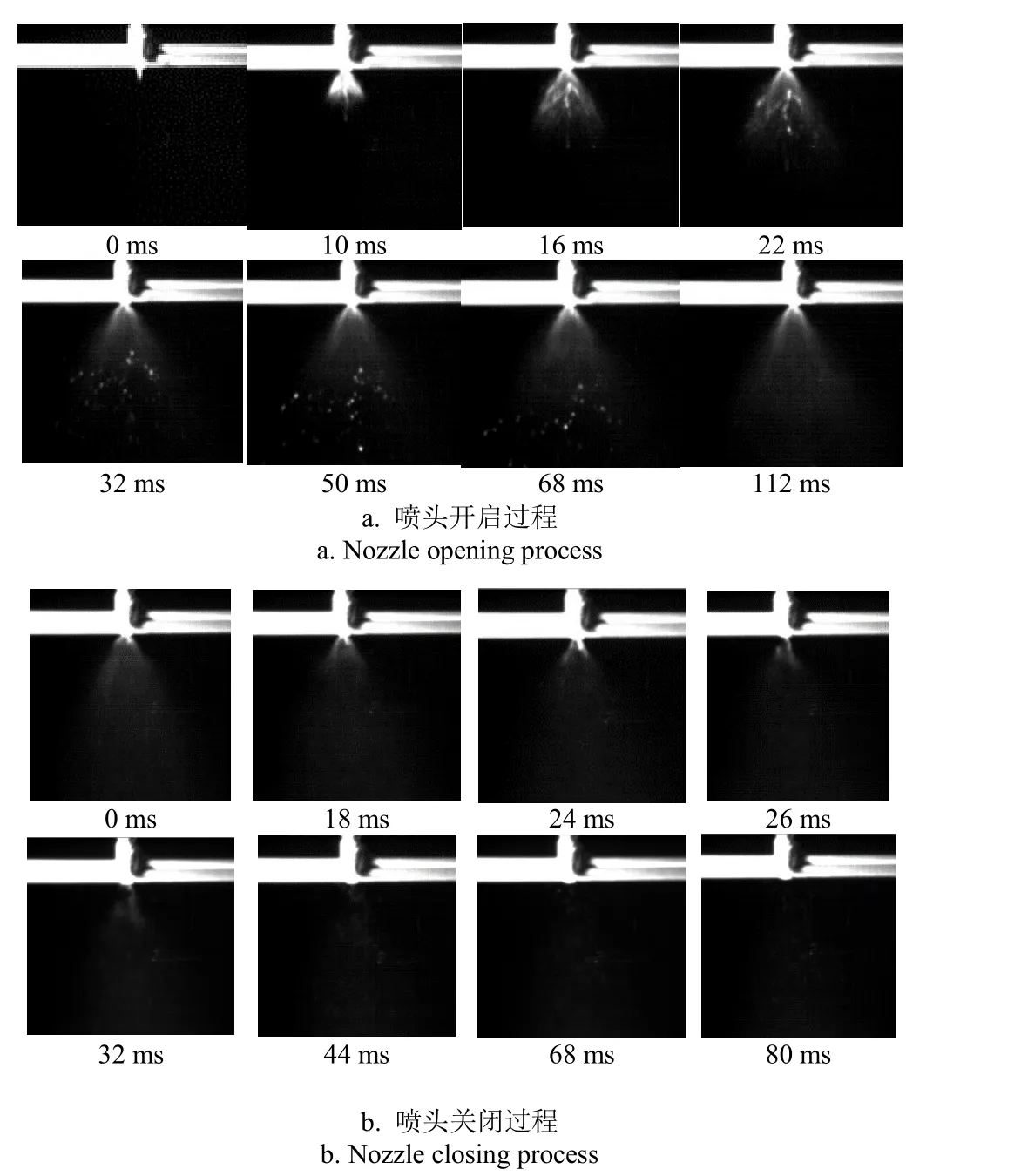
图10 喷头开闭过程Fig.10 Nozzle opening and closing process
2.2 对靶精度
为评价系统加入延时补偿距离后对靶控制精度,设计了阶梯型控制精度标定板,检测原理如图11所示。由于测速装置码盘上相邻两检测点之间对应水平位移为70 mm,为保证LiDAR能够对标定板的每级阶梯最多检测1次,设计标定板每个阶梯的宽度为70 mm。试验过程中,LiDAR能对标定板中每一级阶梯进行检测并计算网格体积和所需药量,进而控制不同高度喷头进行对靶喷药。根据喷雾起始位置处产生喷雾动作的喷头数量判断LiDAR在标定板上的起始检测位置,将喷药起始位置与对应的标定板阶梯位置进行比较(通过高速相机记录相应位置),获得对靶喷药控制超前喷药或滞后喷药的水平距离误差。
结合前期研究,选用140、210和280 mm的网格宽度进行试验。试验在北京市昌平区小汤山国家精准农业研究示范基地进行,地面为平坦的沥青路面,LiDAR距标定板检测距离为1.5 m。启动对靶变量喷药系统,驾驶拖拉机以1 m/s速度移动,高速相机以240帧/s的速度对喷药过程进行录制,每次试验重复3次。试验结束后,使用图像分析软件对喷药过程进行回放,比较喷头开闭位置与对应的阶梯位置,以两个位置间的时间差与移动速度乘积计算出两个位置的距离差,作为对靶喷药控制误差。试验结果如表3所示。
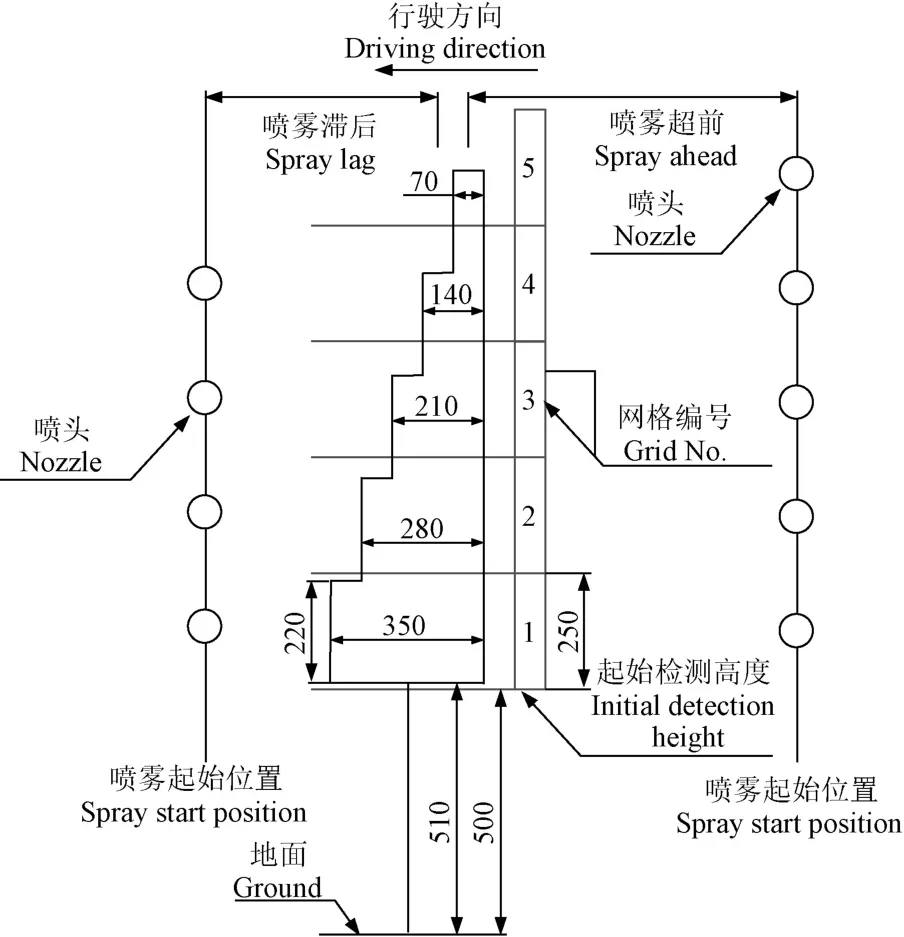
图11 对靶精度检测原理Fig.11 Detection principle of target-oriented accuracy
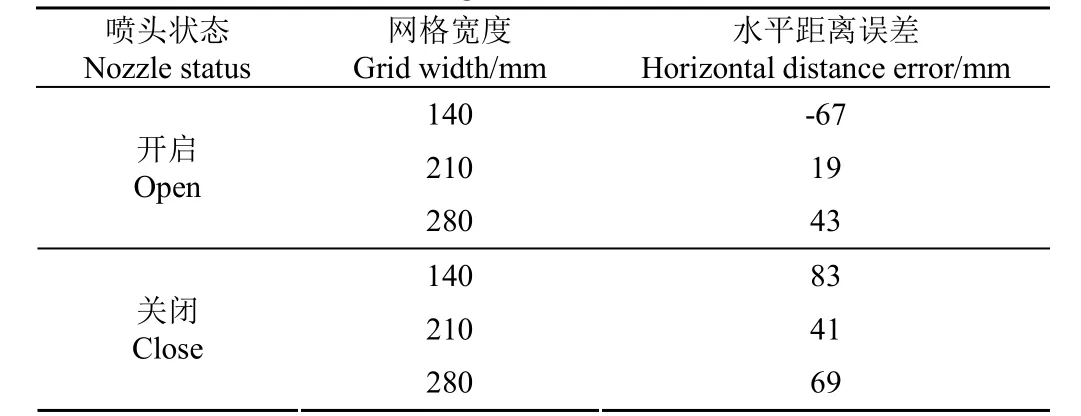
表3 不同网格宽度下对靶精度检测结果Table 3 Test results of target-oriented accuracy under different grid widths
由表3可知,随着网格宽度增大,喷头开启由超前变为滞后,喷头关闭一直为滞后,且对靶误差先减小后增大,当网格宽度为210 mm时,喷头开闭延时误差最小,该对靶变量控制系统最优网格宽度选择为210 mm,此时的喷头开启和关闭滞后距离分别为19和41 mm。实际喷药中,随着作业速度增加,喷药机通过一定网格宽度所需时间减小,理论上对靶精度会降低,其最优网格宽度会发生变化,且速度越大,最优网格宽度应越大。本文选择的最优网格宽度是在果园风送喷药推荐作业速度1 m/s下获得的,由于最佳网格宽度不受喷药机类型影响,该网格宽度适用于对靶变量喷药控制系统在其他类型喷药机上使用,具有一定应用价值。
2.3 样机试验
2.3.1 样机
将果园激光对靶变量喷药控制系统搭载在南通黄海药械有限公司生产的3WG-1200A型果园风送喷药机上,如图12所示。拖拉机选用山东潍坊拖拉机厂生产的TY404拖拉机,后端喷药机通过动力输出轴与拖拉机连接,拖拉机带动喷药机水泵和风机工作进行果园风送喷药,喷药机技术参数如表4。

图12 对靶变量喷雾机样机Fig.12 Target-oriented variable-rate sprayer prototype
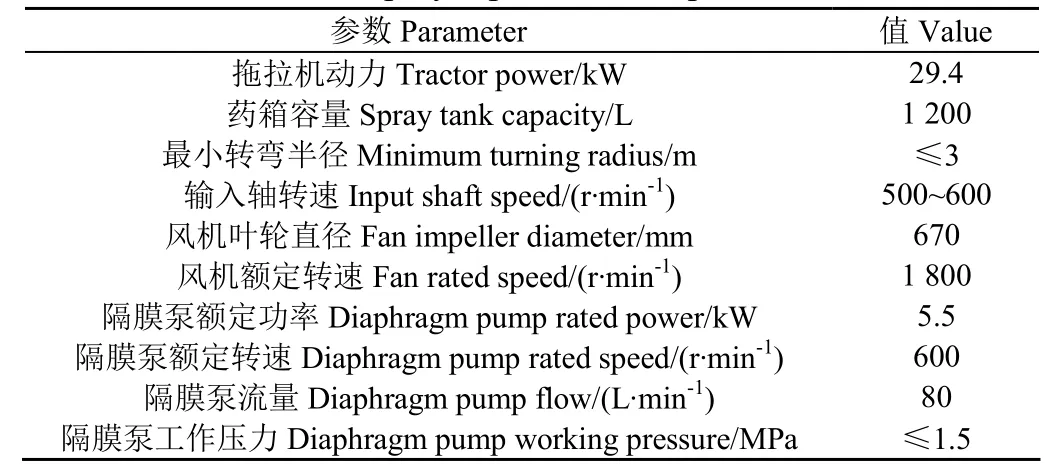
表4 喷药机性能参数Table 4 Sprayer performance parameters
试验在北京市昌平区小汤山国家精准农业研究示范基地桃园进行,桃园为5年果园,品种为瑞光8号,果树行距4.5 m,株距5.0 m。试验过程中,在距离被喷果树20 m位置放置自行研发的田间小型气象站,实时监测环境温度、湿度、光照强度、风速和风向数据。
2.3.2 样机对靶精度
为进一步验证系统在真实果树上对靶精度,进行样机对靶控制精度检测试验,如图13所示。试验时间为2021年10月24日,选择高度为2.3 m和平均宽度为2.4 m的桃树为靶标,在桃树对立面放置白布(宽3 m,高3 m),白布用摄影架支撑,白布距LiDAR距离为2.0 m。试验过程中,修改控制系统程序代码,使右侧LiDAR探测到靶标时控制左侧喷头开启。为了便于测量白布上喷雾宽度,配置一定浓度罗丹明溶液加入喷药机药箱,使喷雾机喷出雾滴变为红色,红色雾滴会清晰呈现在白布上。试验过程中,驾驶喷药机以1 m/s作业速度从北向南进行对靶喷药,试验重复进行3次。试验结束后,测量白布上喷雾宽度相对果树冠层宽度变化,沿喷雾机行走方向,以白布左侧起始喷雾位置相对果树冠层左侧边缘距离为喷头开启误差,以白布右侧终止喷雾位置相对果树冠层右侧边缘距离为喷头关闭误差。试验过程中平均风速为1.23 m/s,风向为316.58°(西北风)。
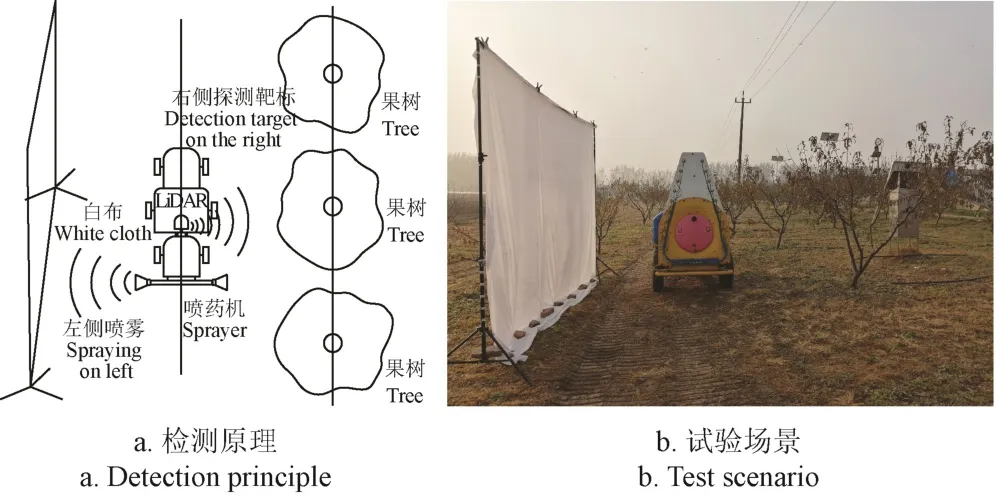
图13 对靶控制精度检测试验Fig.13 Detection tests of target-oriented control accuracy
试验结果如表5所示,可知,针对桃树,喷头开启滞后距离平均值为122 mm,喷头关闭滞后距离平均值为185 mm。相比实验室试验,喷头开启和关闭延时滞后增加,这是由于试验过程中自然风方向沿喷雾机行走方向,雾滴从喷雾机出口到白布传播的过程中,自然风导致雾滴沿喷雾机行进方向移动,致使延时距离滞后。
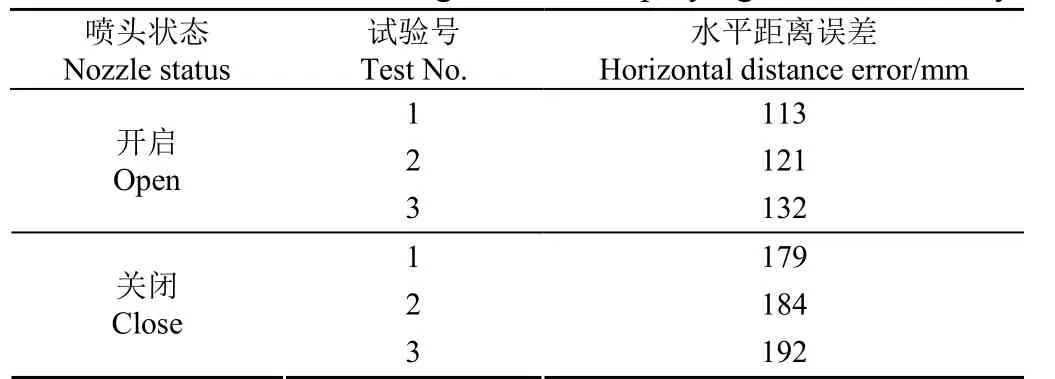
表5 对靶控制精度试验结果Table 5 Test results of target-oriented spraying control accuracy
2.3.3 变量喷药性能试验
为了验证该系统在果园喷药过程中对靶变量喷药性能,于2021年10月25日在上述桃园开展了果园对靶变量喷药试验。选择相邻的3颗果树为试验对象,树1宽度2.5 m,深2.6 m,高2.4 m;树2宽度2.7 m,深2.4 m,高2.3 m;树3宽度2.5 m,深2.6 m,高2.1 m。试验分为连续喷药试验和对靶喷药试验,为评价两种喷药方式的喷药效果,在3棵果树冠层前、中、上、下、左、右6个位置放置水敏纸,如图14所示。水敏纸用曲别针固定在叶片表面。同时,通过流量传感器实时记录试验过程中喷药用量。整个试验中平均风速、风向、温度和空气湿度分别为0.22 m/s、293.85°、19.55 ℃和29.38%。
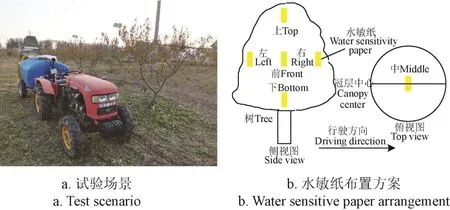
图14 果园对靶变量喷药试验Fig.14 Orchard target-oriented variable-rate spraying test
试验过程中,根据3棵果树位置,选择喷药行走距离为15 m,控制连续喷药和对靶变量喷药均为单边喷药(试验果树一侧),喷雾压力设定为1 MPa,喷药机以1 m/s作业速度分别进行连续和对靶变量喷药,每种喷药方式试验重复3次,每次试验记录总喷药量数据,并用带有标记的塑封袋收集各个采样点的水敏纸,待试验结束后,带回实验室进行分析。
利用天彩电子(深圳)有限公司研发的TSN450型扫描仪对试验采样水敏纸进行扫描,获取水敏纸灰度图像,然后用重庆六六山下有限公司研发的雾滴沉积分析软件对水敏纸扫描图片进行分析,获得雾滴覆盖率和沉积点密度等各项喷雾效果检测指标。根据水敏纸上雾滴沉积分布数据分析结果,利用Origin软件生成果树冠层不同位置雾滴覆盖率均值、沉积密度分布图,如图15和表6所示。
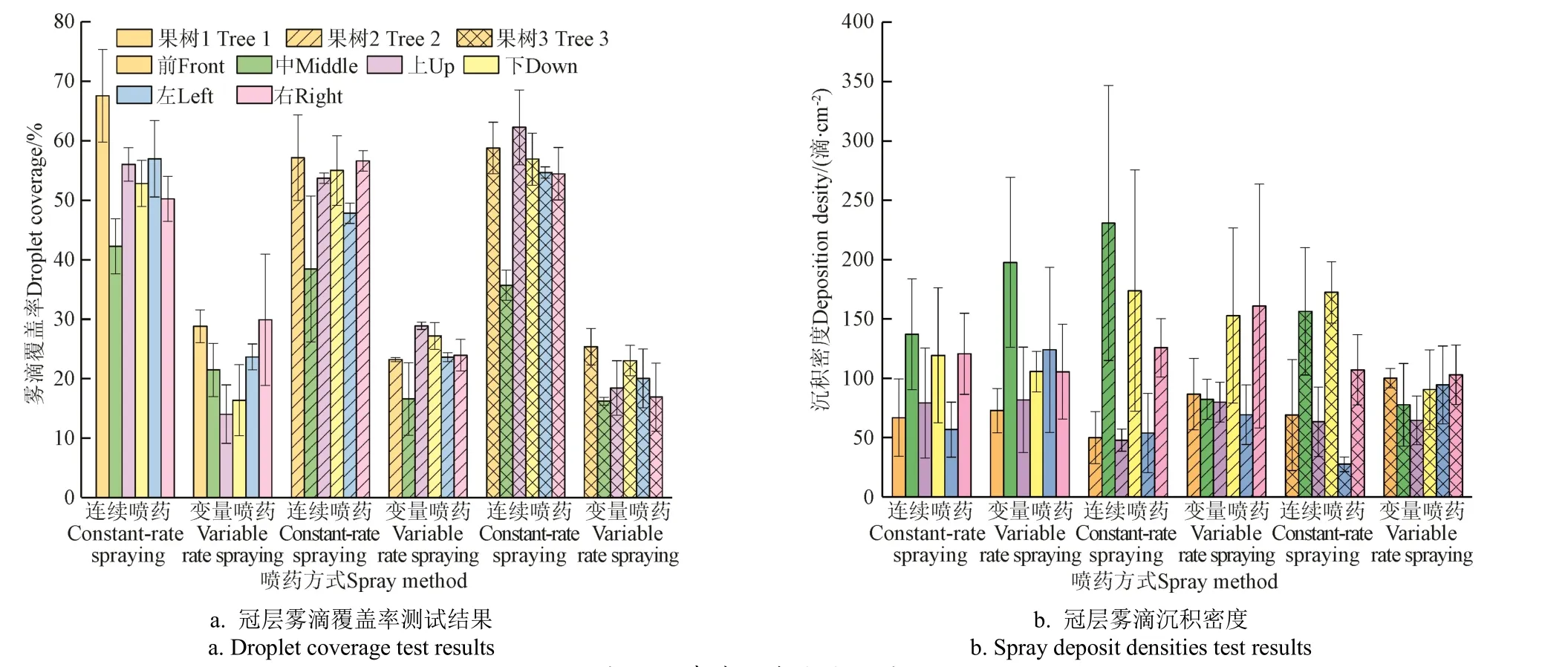
图15 喷药性能试验结果Fig.15 Spraying performance test results
由图15可知,相比连续喷药,对靶变量喷药下3棵果树冠层上雾滴覆盖率均明显降低,两种喷药方式下,雾滴沉积点密度均大于20滴/cm,满足果树病虫害防治要求。相关研究表明,雾滴覆盖率大于30%被认为是过量喷药,导致农药浪费。对靶变量喷药雾滴覆盖率在30%以下,连续喷药雾滴覆盖率在30%以上,说明该系统可根据果树冠层不同位置处网格体积变化调节喷头流量,实现对靶变量喷药,降低冠层内雾滴覆盖率和提高农药利用率。针对连续喷药,冠层前的雾滴沉积密度小于冠层中间的,这是由于连续喷药作业时喷头流量较大,雾滴附着在水敏纸上出现重叠形成大雾滴,较小雾滴被较大雾滴覆盖。而在变量喷药下,随着喷药量的减小,这一现象被减弱,在果树2和果树3较为明显,而果树1未发生改变,可能因为果树1的体积和枝叶稠密度大于果树2和3。
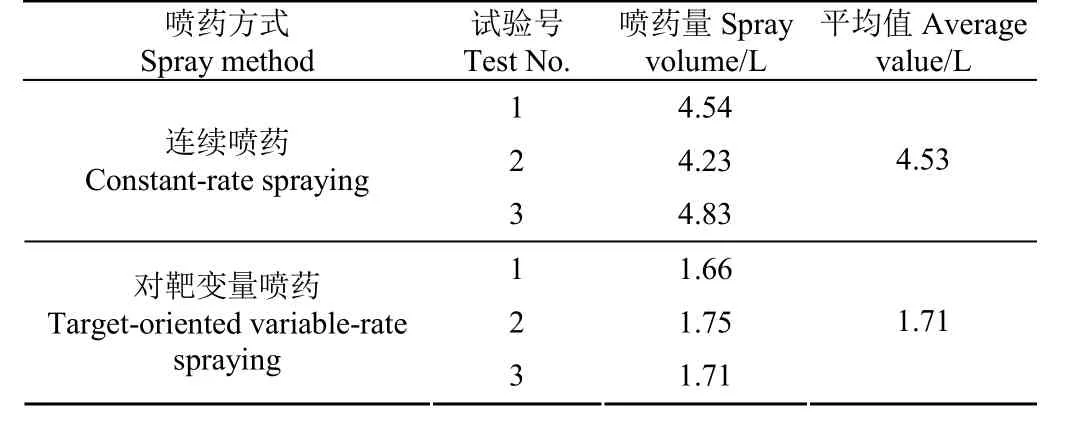
表6 连续和对靶变量喷药量对比Table 6 Comparison of spray volume between constant-rate spraying and variable-rate spraying
由表6可知,在设定试验区域内,连续和对靶变量喷药的农药用量分别为4.53和1.71 L,相比连续喷药,对靶变量喷药可节约药量62.25%。该结果与美国农业部农业研究局针对激光对靶省药量的研究结果相符(激光对靶精准施药技术可节约农药用量60%~67%)。
3 讨 论
由于喷头或喷雾压力的变化会引起喷头流量和喷雾角度变化,进而改变冠层网格体积与单喷头控制流量之间对应关系,本文PWM喷头流量控制模型是在1 MPa压力下建立的,如果更换喷头或改变喷雾压力,需要更换为对应的流量模型。但对于同种型号的喷药机和特定的喷雾压力,用户在正常使用过程中模型是不用变化的。针对PWM喷头流量控制模型通用性问题,后续将开展针对性研究,以提高控制模型和控制系统的通用性。
本文研发对靶变量喷药系统在0~100%占空比所对应的施药量是该喷药机的喷药范围,在使用该喷药机进行喷药时,所需喷施药量应在这个喷药范围内。如果需要增大或减小施药量范围,需要更换不同型号喷头。本文在进行对靶变量喷药控制系统程序设计时,当所需药量范围超出喷药机最大喷施药量范围时,默认PWM占空比为100%。目前,国内老式果园采用非标准化种植,冠层体积较大,激光对靶变量喷药技术在老式果园喷药中可能存在所需喷施药量范围不够的情况,这时需要更换大流量喷头。但随着果园种植模式朝着矮化密植方向发展,这一问题将不再存在,激光对靶变量喷药在新式标准化果园中应用前景广阔。
本文试验期间,北京市昌平区小汤山爆发冰雹天气,果树叶片受冰雹淋洗导致叶片掉落,致使试验果树冠层稀疏。而桃树每年一般需喷农药8次左右。第一次在发芽前,第二次在开花前,第三次在5月下旬,第四五六次在6月,第7次在7月上旬,第8次在8月上旬。而在桃树发芽、开花和树叶逐渐长出过程中,桃树冠层相对挂果期较稀疏,与本文试验桃树冠层类似。因此,本文试验选用桃树虽然冠层稀疏,但试验结果适用于桃树生长早期喷药,研究结果具有一定意义。同时,本文设计的基于LiDAR的果园对靶变量喷药控制系统还有许多需要改进的地方,如不同生长时期桃树冠层的变化是否会影响对靶变量控制系统喷雾精度。后续拟开展全生长周期试验,进一步明确果树冠层变化对系统喷雾精度的影响。
4 结 论
1)针对塔式果园风送喷雾机,基于先前建立的果树冠层网格化体积探测方法建立喷头流量PWM控制模型,获得PWM占空比最佳调节范围为0~60%;根据果园喷药作业需求建立CAN总线通讯协议和开发果园精准对靶变量喷药上位机界面;通过高速相机获取喷头开闭时间,基于喷头开闭时间确定系统延时补偿距离为96 mm;通过实验室试验确定作业速度1 m/s下的最佳网格宽度为210 mm;最终融合对靶喷药控制方法研发可根据果树位置和冠层体积变化进行药量按需调控的果园对靶变量喷药控制系统。
2)将研发的系统与果园喷药机融合集成研发果园对靶变量喷药机样机,开展实验室和果园对靶精度探测试验,试验结果表明,实验室条件下,喷头开启滞后距离为19 mm,喷头关闭滞后距离为41 mm;果园条件下,喷头开启滞后距离为122 mm,喷头关闭滞后距离为185 mm。该对靶变量喷药控制系统可根据果树冠层位置实现对靶喷药控制。
3)开展桃园对靶变量喷药试验,试验结果表明,在雾滴沉积密度大于20滴/cm下,相比连续喷药,该对靶变量喷药控制系统可大大降低雾滴覆盖率(低于过量喷药界定阈值30%)和提高雾滴沉积效果,根据果树冠层不同位置处的体积变化实现对靶变量喷药;在设定试验区域内,连续和对靶变量喷药的农药用量分别为4.53和1.71 L,该控制系统可节约药量62.25%。