四轮独立驱动电动汽车驱动力矩分配方法
2022-04-15朱文静
朱文静,李 刚,姬 晓
(辽宁工业大学 汽车与交通工程学院, 辽宁 锦州 121001)
四轮独立驱动电动汽车因其4个电机独立,力矩精准控制且响应迅速,成为汽车领域的发展方向。如何合理地将驱动力矩分配到4个电机,保证汽车在行驶过程中的稳定性与安全性,是现阶段研究中的热点问题。目前对四轮独立驱动分配控制的研究主要以分层控制为主,上层多采用PID控制[1]、模糊控制[2-3]、SMC[4-5]、LQR控制[6]等算法计算附加横摆力矩,下层多采用基于等功率、等转矩的规则分配[7-8]、优化规则分配[9]、广义逆法[10]以及二次规划法[11-12]对力矩进行分配。这些算法针对的侧重点不同,使控制效果也各不相同,其中规则分配法易实现、计算速度最快但精度不高,环境适应性较差;优化规则分配在规则分配的基础上考虑了加速对汽车的影响,适用范围较广;广义逆法求解方便,但难以满足实际约束条件,需要额外的控制约束;二次规划法易于求解复杂的非线性约束优化问题,且可利用Matlab中现有的程序进行计算。
考虑到行驶的汽车在充分发挥各个车轮最大潜能的同时,也会使车轮处于法向负载过大的情况,为了更好地保持车辆行驶稳定性,提出一种基于二次规划理论,考虑轮胎负荷率的驱动力矩优化分配方法,有效降低轮胎的负荷率,实现驱动力矩的优化分配。
1 驱动力分配控制策略
驱动力分配控制策略采用分层控制,输入信号层根据参考模型求解出理想的车辆状态参数;决策控制层根据控制目标的期望值与实际值的差值决策出附加横摆力矩并进行跟踪控制;分配执行层的驱动力分配器将上层计算出的附加横摆力矩进行合理分配,再由4个驱动电机执行相应指令,控制系统结构如图1所示。
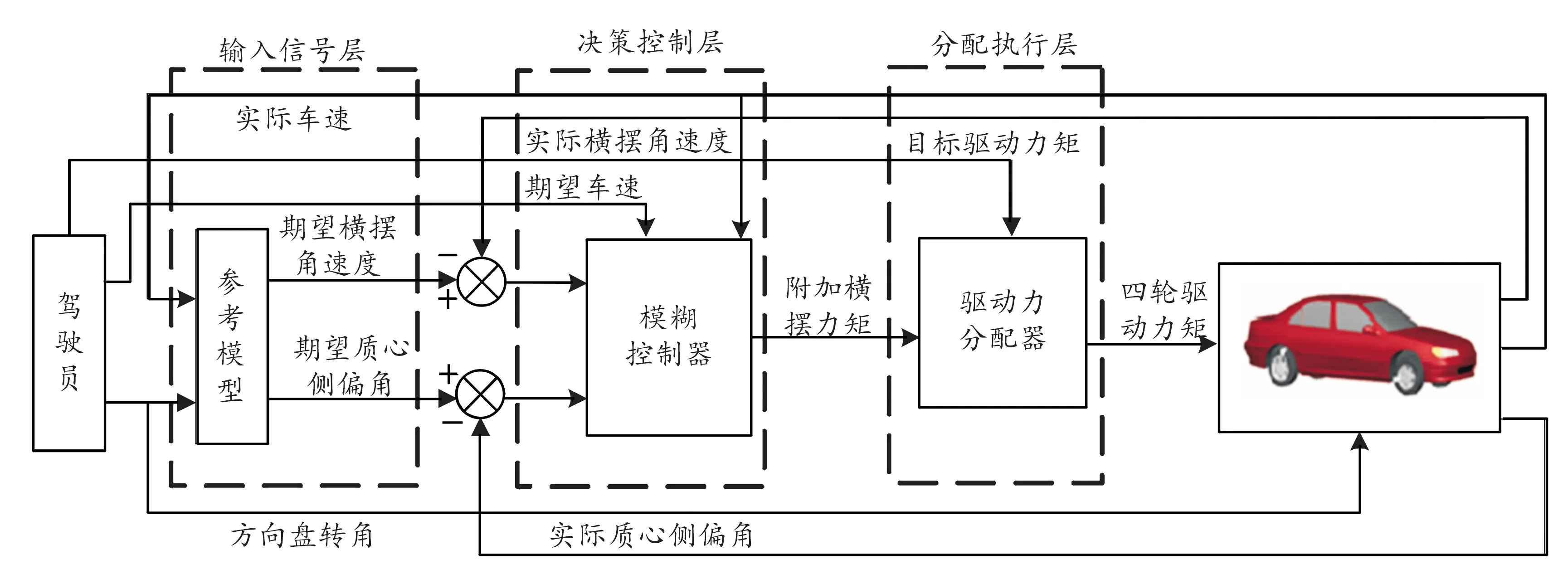
图1 控制系统结构示意图
2 驱动力矩分配方法
2.1 规则分配方法
车辆驱动的总需求力矩由4个轮毂电机来执行,在总需求力矩已知的情况下,通过对驱动力左右侧规则分配,实现附加横摆力矩[13]。
车辆的总驱动力矩为:
Ttotal=(Fx1+Fx2+Fx3+Fx4)×Rw
(1)
式中:Ttotal为总驱动力矩,Rw为车轮滚动半径,Fx1、Fx2、Fx3、Fx4分别表示左前、右前、左后、右后4个车轮的纵向力。
设定车辆前后轮轮距相同,车辆直线行驶时,横摆力矩为零,4个车轮的驱动力相等。车辆转向时,假设每个车轮分担的附加横摆力矩值相等,则由左右侧车轮纵向力不同而产生的附加横摆力矩值为:
ΔMz=(Fx1-Fx2+Fx3-Fx4)×t
(2)
式中:t为二分之一轮距,由式(1)(2)可得±ΔMz的4个驱动力矩表达式:
当附加横摆力矩ΔMz>0时,车辆处于左转不足(或右转过度)状态,此时应增大右侧车轮驱动力矩,减小左侧车轮驱动力矩[14-15]:
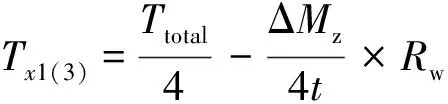
(3)
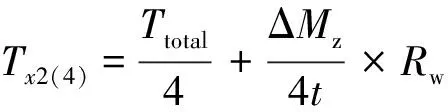
(4)
当附加横摆力矩ΔMz<0 时,车辆处于右转不足(或左转过度)状态,此时增大左侧车轮驱动力矩,减小右侧车轮驱动力矩:
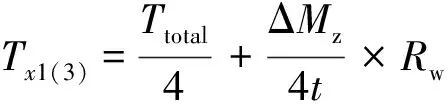
(5)
(6)
规则分配方法相对简单直观,便于实现,但没有考虑实际情况中驱动电机的约束问题。
2.2 考虑垂向载荷的优化规则分配方法
优化规则分配方法针对四轮驱动电动汽车电机独立驱动的特点,基于摩擦椭圆理论[16],以汽车前后轴动态载荷估计值为比例对驱动力矩进行优化分配。
首先以两轮车辆为参考模型,在一定附着系数的路面上,轮胎的纵、侧向力满足摩擦椭圆理论[17],直接横摆力矩主要取决于纵向力的控制,纵向力的作用远大于侧向力,故忽略侧向力的影响,当前后轴车轮同时达到附着极限时,有:
(7)
式中:μ为路面附着系数,Fxf、Fxr前后轴纵向力,Fzf、Fzr为考虑了纵向加速度ax的前后轴动态载荷:
(8)
式中:m为汽车质量,l为前后轴距,a、b为质心到前轴、后轴的距离,h为质心高度,g为重力加速度。
车轮的纵向力由路面附着系数和垂向载荷决定,为了保证前后轮同时到达附着极限,要求轮胎的附着率保持相等,故:
(9)
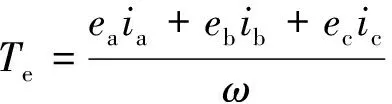
因轮毂电机通过扭矩指令实现驱动控制,所以进行力和力矩的转化:
(10)
同时为了保证车辆的正常行驶以及产生满足控制需求的横摆力矩,有:
(11)
式中:T1、T2、T3、T4分别为左前、右前、左后、右后4个车轮的驱动力矩。
联立上述各式,可得:
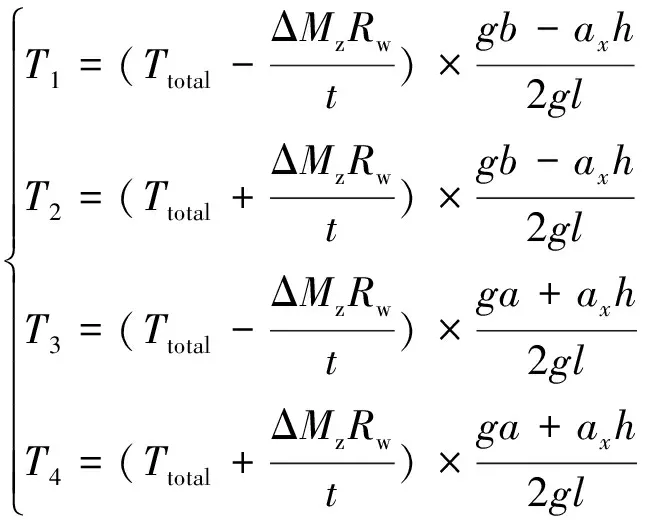
(12)
相对于简单的左右分配方法,规则优化分配的逻辑更加可靠且易于实现,但未考虑车辆行驶中轮胎的利用率,以及每个车轮能否发挥最佳性能的问题,故可能使车轮处于负载过大的情况,对行驶中的车辆造成严重威胁。
2.3 基于轮胎负荷率优化的驱动力矩分配
运用二次规划理论,设计了基于优化轮胎负荷率的力矩分配方法。二次规划常以线性约束解决优化问题,其一般形式如下:
(13)
式中:H、f为项系数矩阵,A、Aeq、b为约束系数,UB、LB为变量x的上下限。
1) 优化目标函数
在车辆行驶过程中轮胎同时存在纵向力与侧向力,轮胎合力受到路面附着系数与车轮垂向载荷所决定的摩擦圆限制。轮胎负荷率描述了摩擦圆的利用程度,反应了轮胎与地面间附着能力的利用情况,是表征车辆稳定性的重要指标[18],定义如下:
(14)
式中:Fxi为轮胎纵向力,Fyi为轮胎侧向力,μ为路面附着系数,Fzi为轮胎所受垂直载荷,η为轮胎负荷率。
轮胎负荷率与轮胎和路面间的附着余量成反比关系。当轮胎负荷率变小,附着余量会增加,潜在的附着能力提高,汽车行驶的稳定程度也相应提高。把最小轮胎负荷率平方和作为优化目标函数,以此获得较大的安全裕度。
(15)
考虑到横摆力矩主要受四轮纵向力的影响,而受侧向力的影响较小,另外为了避免计算量过大,便于实时在线计算,因此,对侧向力忽略不计,简化后的目标函数为:
(16)
2) 约束条件
在分配轮胎力的过程中,应考虑各种现实条件约束,包含动力学约束、摩擦圆约束和执行器的约束等。因此,轮胎合力应满足车辆正常行驶的需求,有:
Fxd=Fxfl+Fxfr+Fxrl+Fxrr
(17)
ΔMz=(Fxfl-Fxfr)t+(Fxrl-Fxrr)t
(18)
其次,轮胎力应满足摩擦圆约束条件,有:
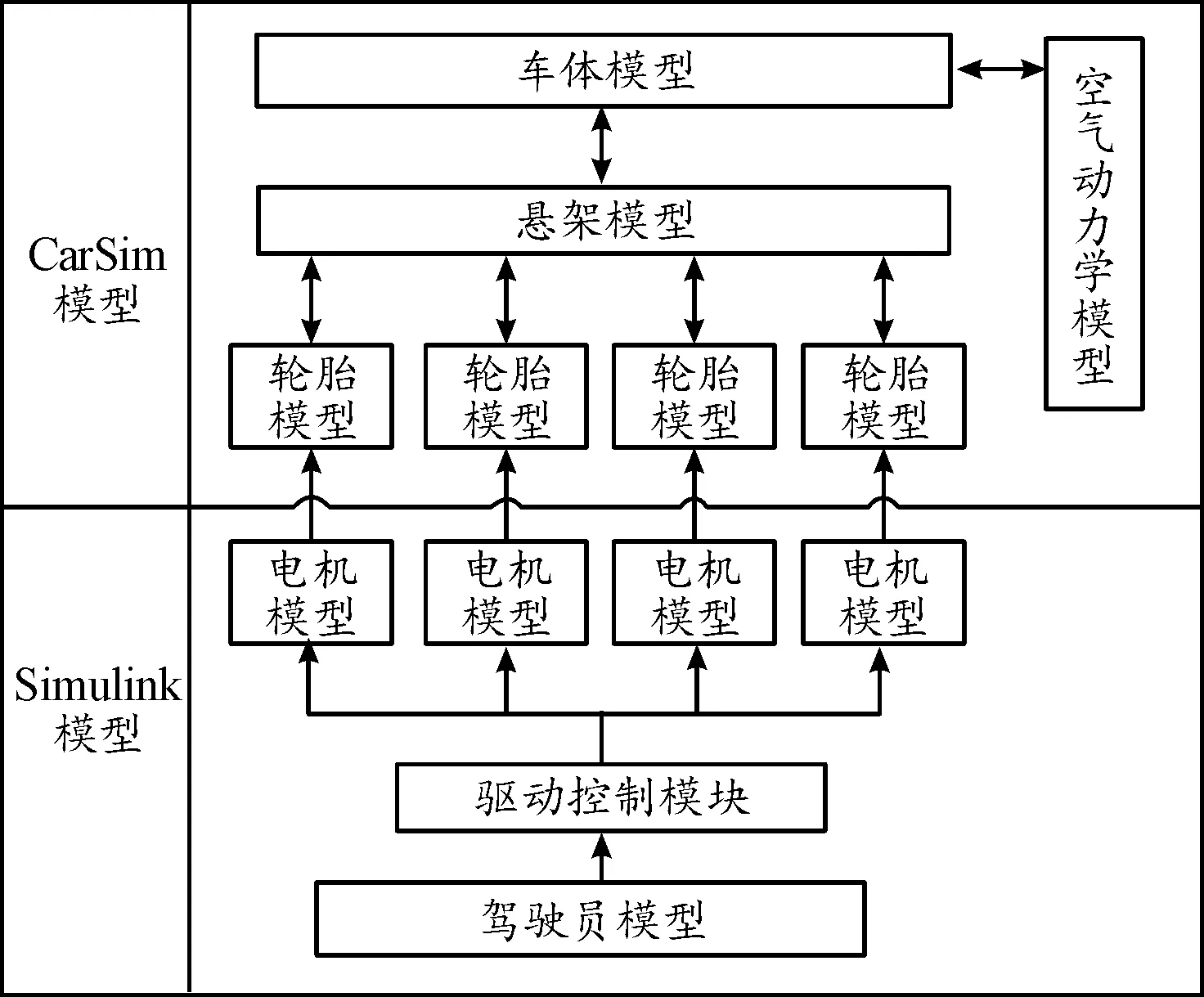
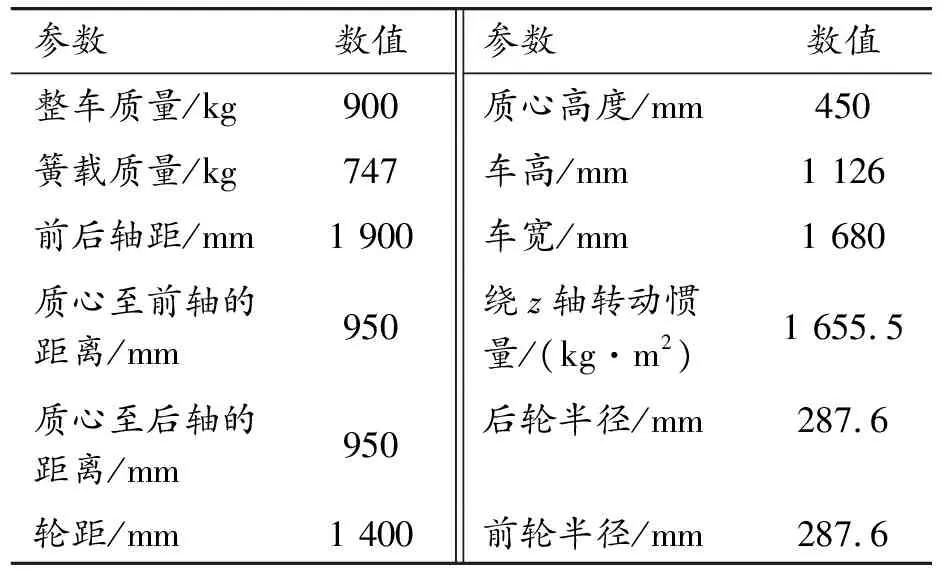
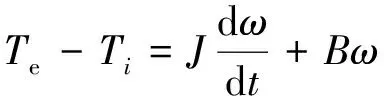
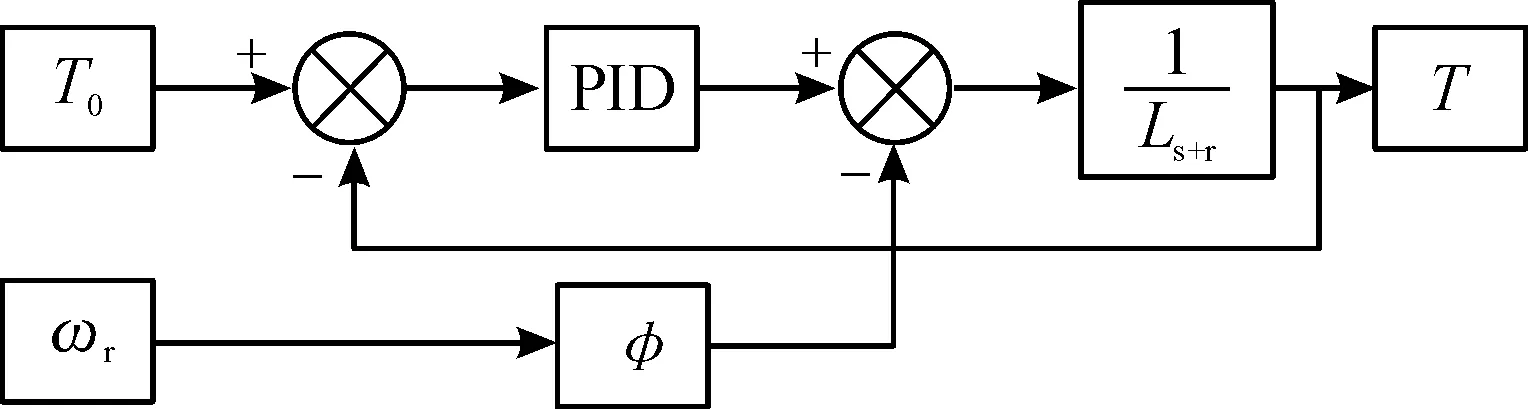
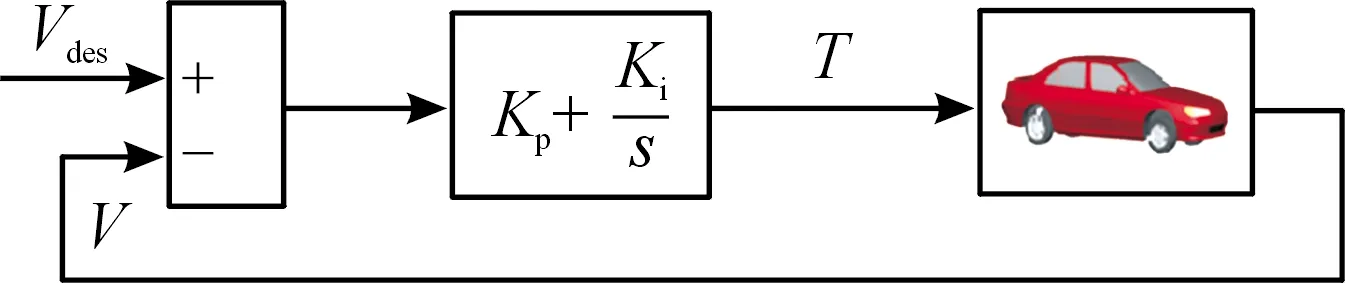
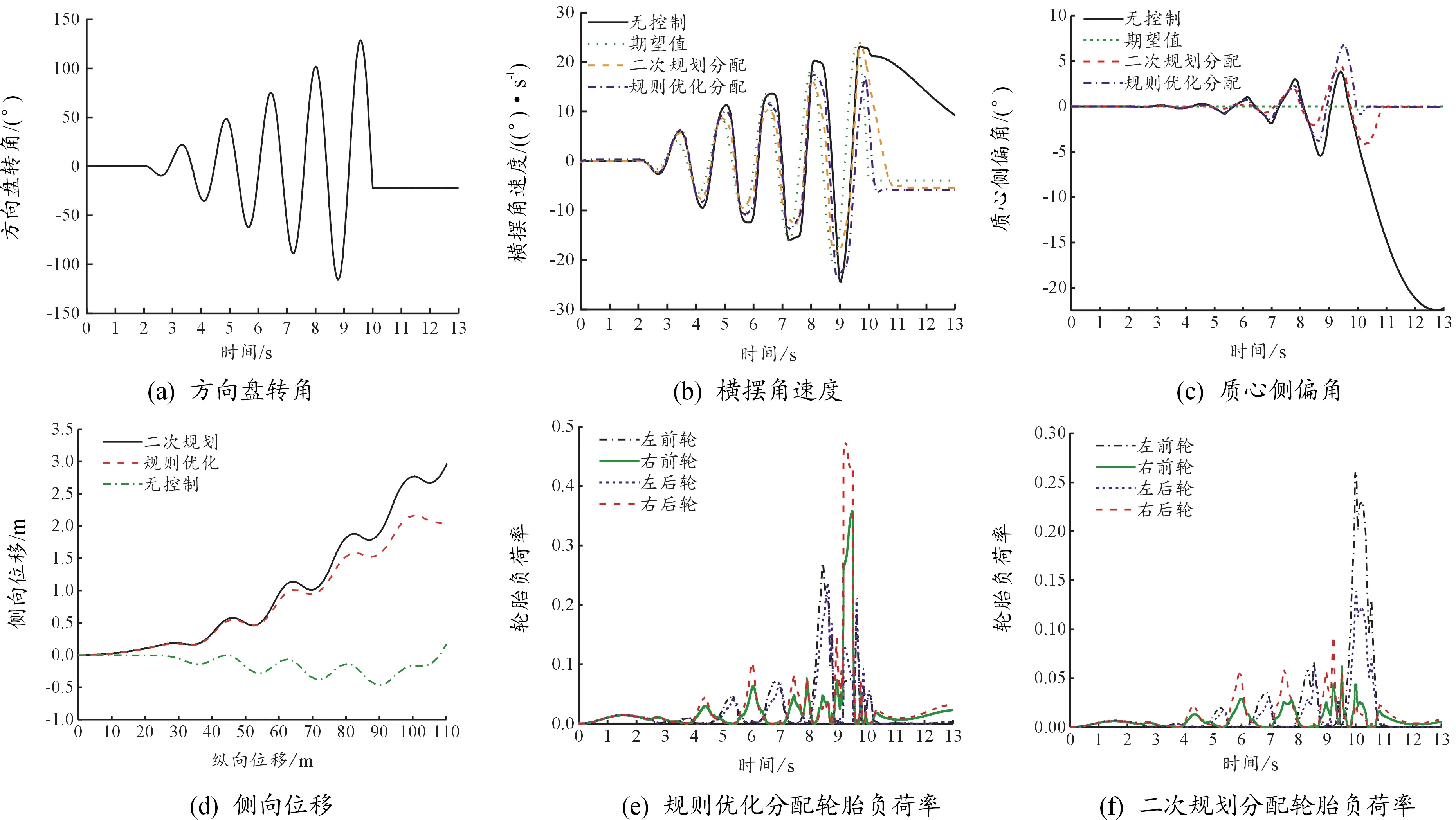
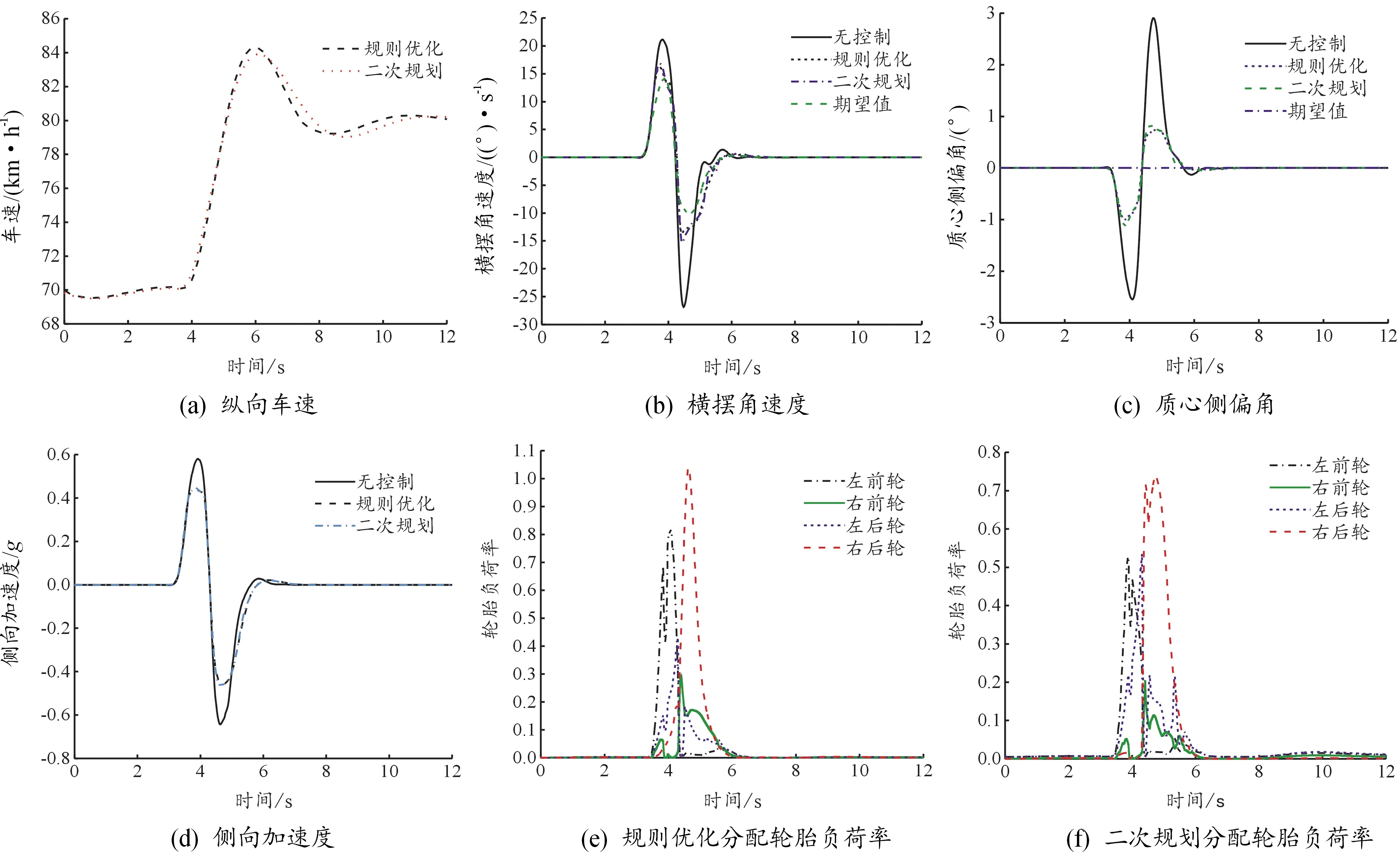
-μFzi (19) 最后,还应充分考虑轮毂电机最大输出转矩,有: (20) 3) 优化分配的实现 根据上述轮胎力分配的约束情况,可以得到二次规划理论在轮胎力优化分配方法中的具体参数。 控制量矩阵X为四轮驱动力: (21) 二次项系数矩阵为: (22) 等式约束条件系数为: (23) (24) 上下限矩阵系数为: (25) (26) 至此,二次规划所需的参数均为已知,应用MATLAB中的二次规划算法程序即可完成轮胎力优化分配任务。 为了验证模型的有效性,在Matlab/Simulink与CarSim联合仿真平台中搭建4WIDEV整车模型,结构如图2所示。 图2 4WIDEV整车模型结构示意图 3.1.1CarSim车辆模型搭建 在CarSim中建立车辆模型,轮胎模型选用H.B.pacejka模型,传动系统改为外部输入,在Simulink中搭建电机模型直接为车辆提供动力,在CarSim车辆模型库中选择A级车作为原型进行修改,基本参数如表1所示。 表1 整车部分基本参数 3.1.2驱动电机模型 将CarSim传动系统中所有机械结构接口改为外部输入,使各车轮独立驱动。在Simulink中用数学法搭建电机模型: (27) 式中:Ua/b/c、ia/b/c、ea/b/c为三相定子绕组的相电压、相电流和反电动势;R为定子绕组的电阻;Ls-m为定子绕组自感与两相绕组互感的差值。 根据电机拖动基本原理,可得到无刷直流电机的电磁转矩和运动方程式: (28) (29) 式(27)(28)和(29)为电机的微分方程数学模型,推导后得出电机的控制结构模型,如图3所示。 图3 驱动电机的控制结构模型示意图 3.1.3驾驶员模型 驾驶员模型可分为横向模型和纵向模型,横向输出为方向盘转角,纵向输出为驱动或制动力矩。仿真过程中的制动可通过电机输出的力矩负值实现,所以不考虑制动系统。横向驾驶员模型可以用CarSim自带的方向盘开环或闭环控制,纵向驾驶员模型在Simulink中搭建,考虑到PID控制器在系统跟踪方面表现出色,采用PI控制器进行驾驶员模型的搭建,可以很好地实现速度控制。驾驶员模型如图4所示。 图4 驾驶员模型示意图 针对横摆力矩的分配问题共提出3种方法,考虑垂向载荷的驱动力矩优化分配是在规则分配的基础上进行改进的,故只对该方法和利用二次规划理论、考虑轮胎负荷率优化的驱动力矩分配方法进行对比实验。 工况1:设定车速为40 km/h,方向盘转角曲线为增幅正弦信号,如图5(a)所示;路面附着系数为0.3,进行验证。 由图5 (b)(c)可知:9 s之后无控制车辆的横摆角速度与期望值产生了较大的差值,最大可达25(°)/s,质心侧偏角也发生了激增,12 s后与期望差值达到了20(°)/s;而采用二次规划分配与规则优化分配方法的车辆横摆角速度与质心侧偏角始终在合理范围内波动,变化平缓且幅值较小,说明车辆平稳行驶未发生侧滑,在10 s后依旧维持车辆的稳定性。 由图5 (d)可知:无控制的车辆严重偏离行驶轨迹。由图5(e)(f)可以看出:9 s左右,采用规则优化分配的车辆横摆角速度和质心侧偏角达到最大值,此时车辆的行驶工况最恶劣,右后轮负荷率较高,接近0.5;10 s左右,采用二次规划分配方法的车辆横摆角速度和质心侧偏角达到最大值,此时车辆的行驶工况最恶劣,左前轮的轮胎负荷率较高,接近0.26。 图5 增幅正弦信号转角仿真工况曲线 分析图5可知:采用以上2种力矩分配方法的车辆在低速行驶中的整体轮胎负荷率都低于0.5,且二次规划分配的轮胎负荷率较规则优化分配的轮胎负荷率降低约48%。 工况2:设定初始车速为70 km/h,在附着系数为0.75的路面上进行变速单移线实验,该工况可以模拟车辆加速变道的情况。设置车辆在3.5 s时开始加速,加速到80 km/h后保持该速度匀速行驶,得到的仿真结果如图6所示。从图6(a)可以看出,规则优化和二次规划分配方法都能很好地满足车辆的纵向需求。 由图6(b)(c)可以看出:相比于无控制车辆,采用规则优化与二次规划分配方法的车辆,都能够很好地跟踪车辆的横向状态参数期望值,基本保持在期望值附近。 由图6(d)可以看出:无控制车辆的侧向加速度已经明显超过0.4g,在0.6g附近,此时车辆处于大侧向加速度状态,车辆的转向特性不再遵循线性转向特性,极易发生失稳,陷入危险状态。相比之下,二次规划与规则优化能使车辆侧向加速度基本维持在0.4g左右,使车辆处于可保证线性转向特性的小侧向加速度范围内。由图6(e)(f)可以看出:第5 s二次规划分配与规则优化分配的右后轮轮胎负荷率达到最大值,分别为0.74、1.05。 分析图6可知:随着仿真工况车速的提高,采用2种力矩分配方法的轮胎负荷率也整体升高。此时,二次规划分配的轮胎负荷率较规则优化分配的轮胎负荷率仍能降低约30%。 图6 加速单移线仿真工况曲线 1) 相比于规则优化分配,二次规划分配方法不仅能很好地跟踪车辆稳定性状态参数,还提升了轮胎的稳定裕度,提高了汽车在行驶过程中保持稳定性与安全性的能力。 2) 二次规划分配方法能够有效降低轮胎负荷率。在实际应用中,可以有效减少由轮胎负荷率过高而引起的轮胎受损、轮胎使用寿命缩短等影响汽车行驶安全的问题发生。 3) 在进一步对驱动力矩分配方法的扩展研究中可以考虑:能否在发挥轮胎最大性能的同时降低电机能耗,达到节能控制的目的。
3 仿真实验验证
3.1 仿真模型搭建
3.2 实验验证
4 结论
