氢燃料电池汽车能量管理系统模糊控制仿真研究
2022-04-15赵天宇霍为炜
赵天宇,陈 东,霍为炜,2,孙 超,任 强
(1.北京信息科技大学 机电工程学院,北京 100192;2.新能源汽车北京实验室,北京 100192;3.北京理工大学 机械与车辆学院,北京 100081;4.广州汽车集团股份有限公司,广州 510623)
随着全球环境问题和能源危机加重,各国对新能源汽车的研究日益增加,氢燃料电池汽车因其节能、高效、零排放等优点备受关注。针对氢燃料电池动态响应速度慢、无法进行制动回收、系统寿命低且更换成本高等缺陷[1],匹配复合电源系统作为燃料电池汽车动力源并建立提高氢燃料电池汽车经济性和使用寿命的能量管理策略显得尤为重要。
目前,大部分研究人员对氢燃料电池汽车经济性和使用寿命的研究多集中于动力系统参数优化匹配和控制策略开发[2-4]。刘世闯等[5]提出一种大功率燃料电池有限保护控制策略,在满足整车动力性前提下,提高燃料电池系统的使用寿命。甘锐等[6]提出优化燃料电池效率区间控制策略,根据车辆不同行驶状态,有效降低氢气消耗量。Zheng等[7]提出基于PMP能量管理策略,并引入成本函数,有效提高了燃料电池的使用寿命。Ettihir等[8]基于自适应最小二乘法在线辨识燃料电池最佳工作点,提高燃料电池经济性。
1 燃料电池动力系统建模
本文研究的某款氢燃料电池客车主要由氢燃料电池电堆、锂离子动力电池组、永磁同步驱动电机、主减速器、车轮和车上其余部件的耗能电阻组成[9-10]。拓扑结构选择间接型氢燃料电池系统[11],动力系统仿真模型如图1所示。该拓扑结构中氢燃料电池通过单向DC-DC升压变换器与母线电压等级进行匹配,使氢燃料电池的功率输出与系统直流母线的电压不再有耦合关系,同时DC-DC变换器将直流母线的电压维持在电机系统最适宜的值,从而提高氢燃料电池系统效率。
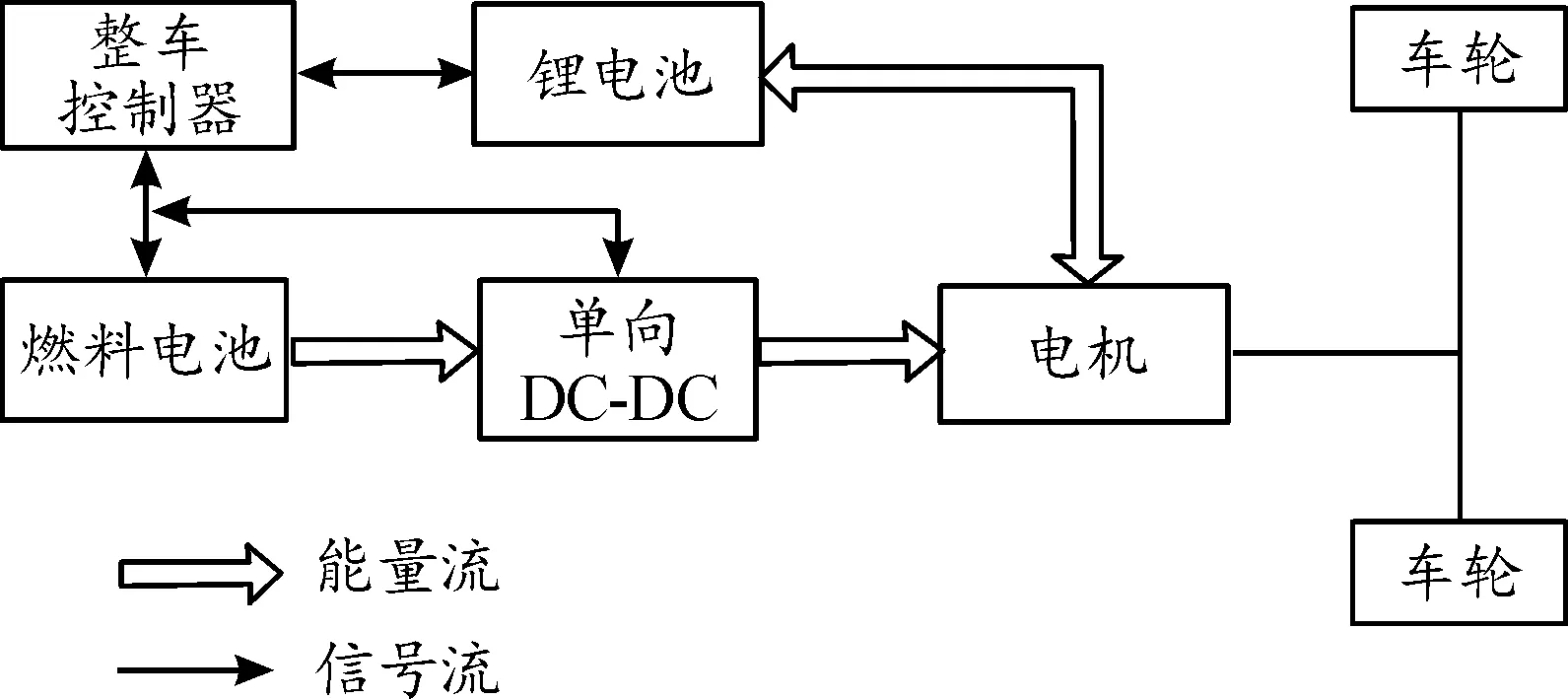
图1 氢燃料电池动力系统仿真模型框图
2 动力传动系统参数匹配
利用氢燃料电池和锂离子动力电池组成的复合电源系统为整车提供动力,根据汽车最高车速、加速时间和最大爬坡度确定整车最高需求功率,进而选择永磁同步电机型号和燃料电池的峰值功率。整车及其部件参数如表1所示。

表1 整车及其部件参数
3 氢燃料电池工作特性
氢燃料电池存在最佳工作效率区间:该区间具有能量转化率高、氢消耗低、热损耗小等优点。因此,燃料电池输出功率处于最佳工作区间对提高能量利用率和延长氢燃料电池寿命具有重要意义。常见氢燃料电池电流密度与电堆效率的关系如图2所示。
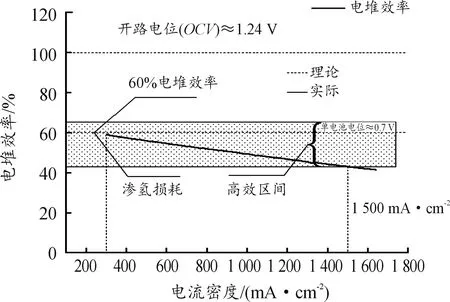
图2 氢燃料电池电流密度与电堆效率的关系图
氢燃料电池0.5~0.8 V是单体电池的最佳效率区间,对应的电流密度为600~1 500 mA/cm2,面功率密度为300~1 200 mW/cm2。电流密度较小时,渗氢损耗是能量损耗的主要形式,而面功率密度较大时,氢燃料电池内部损耗主要为活化极化、欧姆极化和浓差极化[12]。由图2可知,当氢燃料电池的电流密度为300~1 500 mA/cm2时,电堆效率为45%~65%,氢燃料电池处于最佳工作效率区间[13-14]。
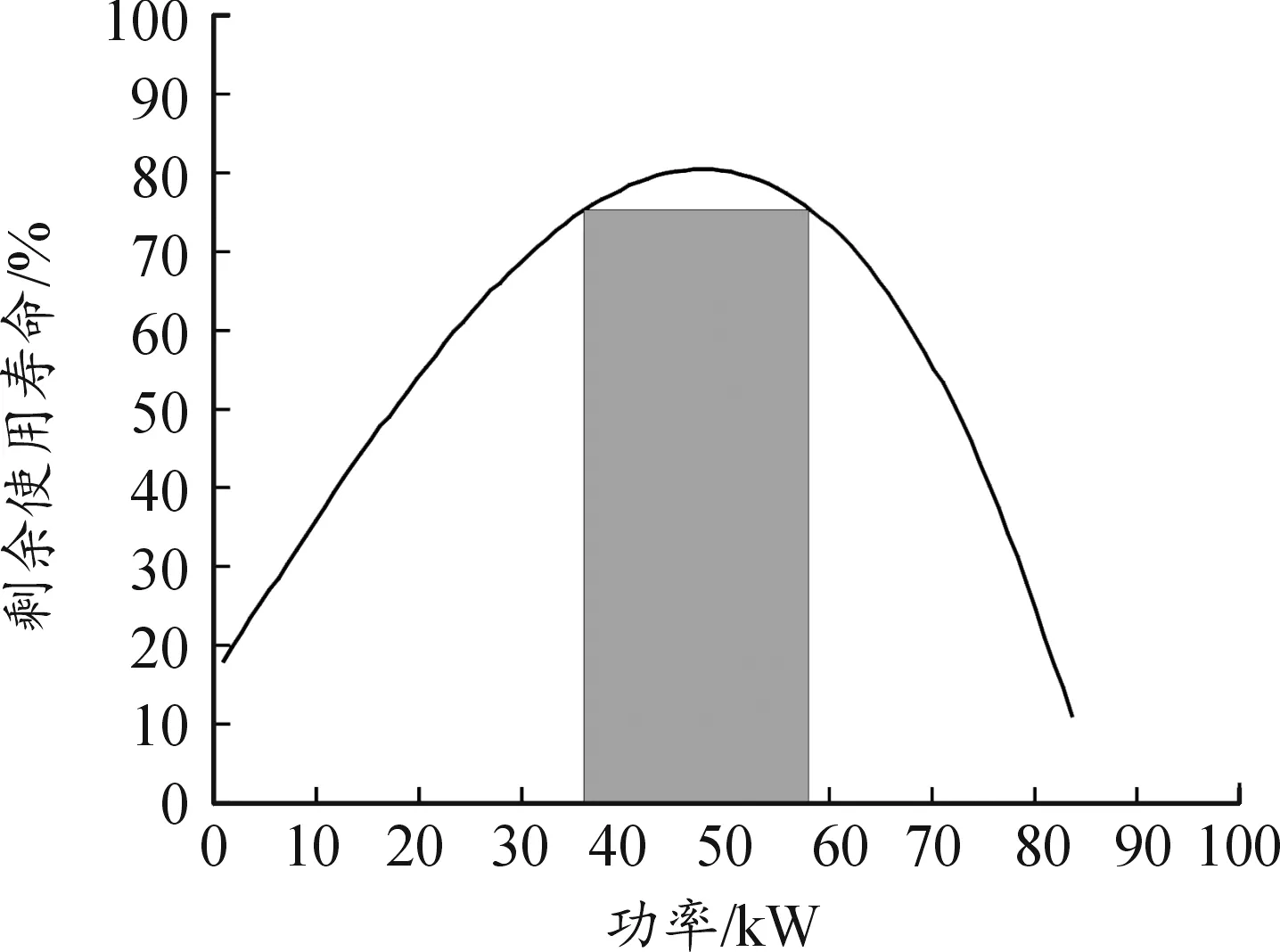
图3 85 kW氢燃料电池RUL与输出功率的关系曲线
由图2中的氢燃料电池的电堆效率可计算出图3中的85 kW氢燃料电池模型最佳效率工作区间的输出功率,即当电堆的输出功率处于38~55 kW时,氢燃料电池处于最佳效率工作区间,寿命最长;当输出功率在其他区间时,氢燃料电池的寿命缩短。剩余使用寿命(remaining useful life,RUL)是由电堆本身的特性决定的[15-18],受到多种因素的影响,如输出功率范围的波动、制造工艺、工作环境等,是一个比较复杂且与多种因素相互关联的问题。
4 基于逻辑控制的能量管理系统
4.1 功率跟随能量管理策略
氢燃料电池混合动力汽车主要有4种工作模式:
1) 启动模式。氢燃料电池的启动需要经过预热状态,锂离子动力电池为整车提供能量。
2) 正常行驶状态。根据锂离子动力电池SOC值,判断氢燃料电池的工作模式。
3) 巡航模式。根据汽车需求功率,判断锂离子动力电池的工作模式。
4) 减速制动模式。当汽车进行减速制动时,锂离子动力电池进行制动回收。
4.2 模糊控制器设计
基于微小变量模糊控制策略,使氢燃料电池工作在最佳寿命区域内,避免燃料电池的频繁启停,同时保证锂电池SOC在一个较高值范围内波动。本文设计了一个双输入和单输出的模糊控制器,将整车需求功率Preq和锂离子动力电池 SOC作为模糊控制器的输入量,氢燃料电池需求功率Pfc作为模糊控制器的输出量。模糊逻辑规则如表2所示。

表2 模糊逻辑规则
基于中国典型公交工况,整车需求功率Preq隶属度函数的论域为[0,203],锂离子动力电池SOC的论域为[0,1],氢燃料电池需求功率Pfc隶属度函数的论域为[0,85]。分别将Preq、SOC、Pfc划分为5个子集,即Preq=[VS S M B VB],SOC=[VS S M B VB],Pfc=[VS S M B VB]。
5 仿真结果与对比分析
运用Matlab-Simulink和AVL-Cruise对设计的氢燃料电池汽车动力传动系统参数模型进行仿真验证。基于中国典型城市公交工况(CCBC),锂电池初始SOC设定为60%。车辆处于满载情况下,为提高数据准确性进行连续4次CCBC工况的行驶,仿真得到功率跟随策略和模糊控制策略下氢燃料电池输出功率的曲线分布。由图4可知,在模糊控制策略下,氢燃料电池输出功率稳定在43 kW左右,处于最佳效率工作区间。氢燃料电池高效工作1 861 s,高效工作时间占总工作时间的71.01%。在功率跟随策略下,氢燃料电池高效工作688 s,高效工作时间占总工作时间的27.3%。与功率跟随策略相比,模糊控制策略下氢燃料电池高效工作时间增加了44.61%,在高效工作区间稳定输出,使用寿命得到明显提高。

图4 功率跟随策略和模糊控制策略下氢燃料电池输出功率曲线
为了保证氢燃料电池在高效工作区间稳定工作,通过锂电池的快速响应满足整车需求功率的瞬时大幅波动。由图5可知,在功率跟随策略下,锂离子电池输出功率高于55 kW的时间为239 s,占锂离子电池功率输出工作时间的2.94%;在模糊控制策略下,锂离子电池输出功率高于55 kW的时间为862 s,占锂离子电池功率输出工作时间的9.48%。由以上数据可知,锂离子电池在模糊控制策略下能够减少氢燃料电池功率的大幅波动,从而增加氢燃料电池的使用寿命。
由图4和图5共同分析可知,当整车瞬时需求功率大幅波动时,需要锂电池和氢燃料电池系统配合使用。在本文提出的模糊控制策略下,通过锂电池快速响应大部分功率波动,使氢燃料电池在最佳工作效率区间保持功率输出稳定,避免氢燃料电池频繁启停和时常处于峰值功率输出,提高氢燃料电池的使用寿命[18]。

图5 功率跟随策略和模糊控制策略下锂电池输出功率曲线
图6为功率跟随策略和模糊控制策略下锂电池SOC变化曲线。通过图6分析可知,模糊控制策略下,锂离子动力电池SOC从80%下降到60%用时1 275 s;功率跟随策略下,锂离子动力电池SOC从80%下降到60%用时2 040 s。根据两者控制策略条件下SOC变化曲线得到,在模糊控制策略下,锂离子动力电池放电速度提高37.5%,由此可以说明,相同时间内,模糊控制策略下,锂离子动力电池动态响应整车需求功率的速度要优于功率跟随策略控制条件,从而减少氢燃料电池功率大幅度波动,以增加氢燃料电池系统的使用寿命。

图6 功率跟随策略和模糊控制策略下锂电池SOC变化曲线
图7为功率跟随策略和模糊控制策略下氢燃料电池的氢气消耗量变化曲线。氢燃料电池客车经过4次CCBC循环,共行驶30.97 km。由图7可知,在模糊控制策略下,系统氢气消耗量为2.254 kg;在功率跟随策略下,系统氢气消耗量为2.441 kg。通过以上数据分析可知,本文提出的模糊控制策略相比于功率跟随策略,系统氢气消耗量降低了7.8%,氢燃料电池的经济性得到明显提高。

图7 功率跟随策略和模糊控制策略下氢燃料电池的氢气消耗量曲线
6 结论
通过整车系统动力性参数匹配复合电源,并结合功率跟随和模糊控制原理与结构,分别设计了氢燃料电池汽车能量管理策略。通过对汽车能量流动分析建立模糊控制规则。运用Matlab-Simulink和AVL-Cruise的联合仿真,并与传统功率跟随策略对比,得出以下结论:
1) 基于4次CCBC循环工况,模糊控制策略下,氢燃料电池百公里氢耗为7.28 kg,相比于功率跟随策略下,氢耗量降低7.8%。
2) 模糊控制策略下的氢燃料电池稳定输出在43 kW左右,基于氢燃料电池响应速度慢,将功率波动的快速响应交给锂电池,有助于提高氢燃料电池能量利用率。在模糊控制策略下,氢燃料电池高效工作1 861 s,高效工作时间占总工作时间的71.01%;在功率跟随策略下,氢燃料电池高效工作688 s,高效工作时间占总工作时间的27.3%。模糊控制策略下,氢燃料电池在最佳效率区间的工作时间提高了44.61%,有助于增加氢燃料电池的寿命,降低燃料电池更换成本。
