自动驾驶车流对区域规划路网密度的影响分析
2022-04-13李子辉李美玲冉晋朱香敏
李子辉, 李美玲, 冉晋, 朱香敏
(1.山东建筑大学 山东高校重点实验室道路与交通工程实验室, 山东 济南 250101;2.山东省交通科学研究院, 山东 济南 250102;3.山东高速股份有限公司, 山东 济南 250101)
自动驾驶汽车与人工驾驶汽车混合行驶,若不考虑自动驾驶汽车的影响,不仅会对交通安全造成威胁,还会带来交通拥堵、能源及环境等问题。Ioannou P.对自动驾驶车辆、半自动驾驶车辆和手动驾驶车辆对道路交通安全和效率的影响进行了分析;Bose A.等分析了自动驾驶、手动驾驶车辆行驶在同一车道时对交通流特性及环境的影响;马丽娜运用元胞自动机对不同交通条件下无人驾驶、手动驾驶交通流特点进行了分析;陈广宇等基于元胞自动机交通流模型构建人工驾驶汽车及配有自动巡航系统(ACC)车辆的运动规则,研究混合ACC车辆与人工驾驶汽车的交通流模型;陈丽烨对自动驾驶汽车规模化运营后城市道路交通规划与基础设施设计面临的问题和挑战进行了分析。
在路网规划阶段,表征交通供给的主要有路网形式、路网密度和路网级配,其中路网密度是最重要的量化指标。在进行区域路网规划时,可将自动驾驶车流的影响转化为自动驾驶车流的加入对路网密度的影响。该文基于供需平衡思想构建考虑自动驾驶车流的路网密度模型,针对具体场景进行参数标定,分析自动驾驶车流对区域规划路网密度的影响。
1 模型构建
自动驾驶汽车的运行机理与人工驾驶汽车存在较大差异,主要表现在环境感知、规划决策和应急避险等方面(见表1)。
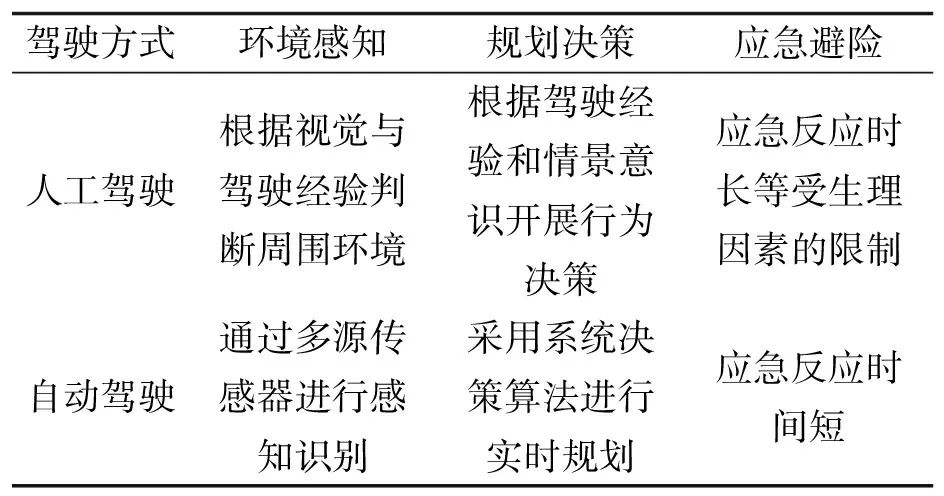
表1 自动驾驶与人工驾驶汽车运行机理的差异
1.1 模型引入
确定合理路网规划密度的方法有经验类比法、指标计算法、供需平衡法和交通仿真法。这里选用供需平衡法,参考文献[10],考虑土地资源利用、城市规模及城市人口标准、工作岗位经营规模和车辆拥有量,构建以交通供需平衡、道路用地面积控制、干道网密度约束、支路密度约束、路网等级结构和路网各等级周转量为约束条件,以路网周转量最大及道路建设投资最少为目标的道路网密度模型。为提高城市交通服务水平,在该模型的基础上加入自动驾驶车流,改变部分参数取值,同时考虑过境交通比例,构建考虑自动驾驶车流的路网密度模型。
1.2 目标函数
路网密度模型中的目标函数是使所研究区域内部各级道路的交通供应总量最大,即道路网各等级道路周转量总和最大,表达式如下:
(1)
式中:V为道路网总周转量(pcu·km/h);Qi为第i类道路的周转量(pcu·km/h);i表示城市道路种类,分别为快速路、主干路、次干路和支路;Ci为第i类道路单条车道的可能通行能力(pcu/h);αi为第i类道路的平均饱和度;βi为第i类道路的交叉口折减系数;γi为第i类道路的车道综合折减系数;Ni为第i类道路的平均机动车车道数;Li为第i类道路的里程(km)。
1.3 约束条件
道路交通供给应高于或等于城市交通需求,其平衡条件为:
(2)
式中:D1为区域内交通需求(pcu·km/h);D2为过境交通需求(pcu·km/h)。
区域路网规划中还需考虑城市道路面积控制、合理干路网密度和各级道路合理级配等条件,参考文献[7],依据研究区域实际位置确定各种约束条件:
(3)
式中:di为各等级道路宽度(km);Li为各等级道路长度(km);S为研究区域面积(km2);Amax为区域道路面积率上限值(%);L2、L3分别为研究区域内主干路、次干路长度(km);εg为合理干路网密度(km/km2);L4为研究区域内支路长度(km);εz为合理支路网密度(km/km2)。
2 自动驾驶车流对模型参数的影响分析
2.1 可能通行能力
可能通行能力是指在实际道路和交通条件下,1条车道或1条道路某一路段的通行能力。在交通流中未加入自动驾驶车流(自动驾驶车流占比=0)时,根据CJJ 37—2012《城市道路工程设计规范》,单条车道的可能通行能力见表2。加入自动驾驶车流后,在单车道通行能力影响因素中,交通条件(指交通特征,包括交通流的交通组成、交通量及车道分布、方向分布等)发生变化。不同自动驾驶车辆占比下单条车道的可能通行能力Ci见表2。自动驾驶车辆占比为20%时对通行能力影响不大,不予考虑。
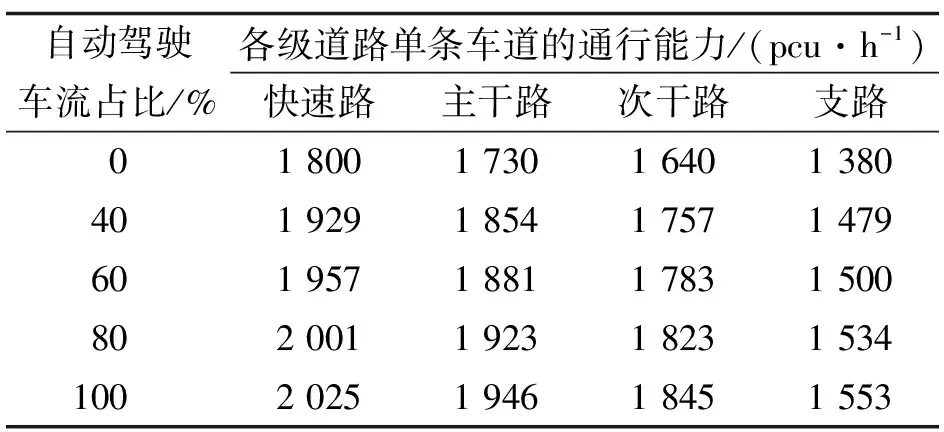
表2 单条车道的可能通行能力
2.2 出行方式占比
出行方式占比通过研究区域所在城市的出行调查获得,若为新规划区域,则根据该区域的交通发展模式确定。
根据济南市2018年居民出行调查结果,公交车、小汽车、出租车的出行占比分别为21.16%、 15.74%、1.08%。将自动驾驶车辆在私家车和出租车中所占比例从0~100%每隔20%取一个值,由于出行方式占比与各级道路通行能力存在联系,不考虑自动驾驶车辆占比20%时各类交通方式的划分,只研究0、40%、60%、80%、100%自动驾驶车辆占比下的情况(见表3)。
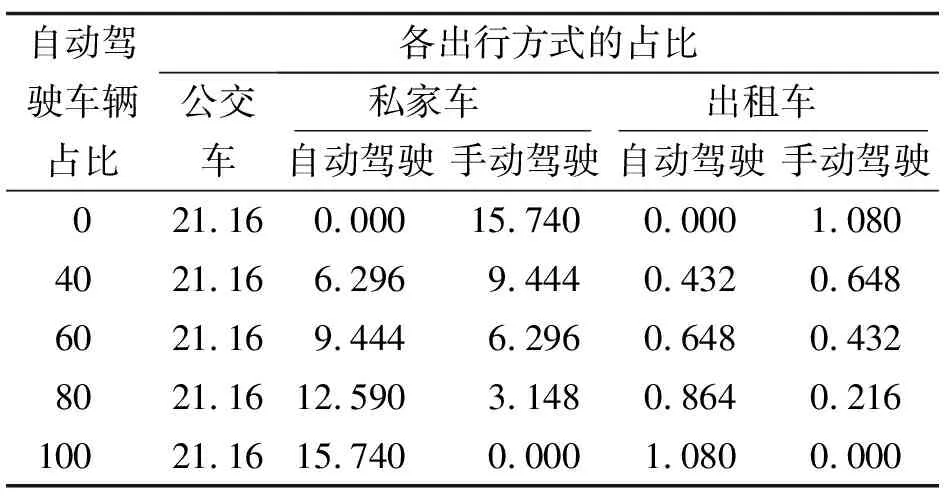
表3 不同自动驾驶车辆占比下各出行方式的占比 %
2.3 平均载客数
区域内的主要交通工具有自动驾驶汽车、非机动车、公交车、私家车、出租车和单位班车,根据CJJ 37—2012《城市道路工程设计规范》中换算系数参考值,假定自动驾驶车辆作为私家车和出租车使用,公交车、私家车(自动驾驶)、私家车(手动驾驶)、出租车(自动驾驶)、出租车(手动驾驶) 的换算系数为3∶1∶1∶1∶1。
车型的平均载客数通过所在城市交通调查获得,公交车、私家车、出租车的平均载客数分别为30、1.67、2.2 人/车,平均载客数取私家车2人/车、出租车2 人/车。
3 研究场景构建与参数标定
选取济南市某区域作为研究场景标定计算参数,分析加入自动驾驶车流后合理道路网密度与等级结构。
3.1 场景简介
图1为济南市某区域地块原型。选取1 km2作为研究范围,区域内采用方格网状布局,地块功能分为商业金融、商务办公、行政服务及配套的居住和公共设施,主干路布置在区域外围,次干路布置在区域中心和外围,支路布置在区域内部。抽象处理后得到的高密度开发布局形式见图2。

图1 济南市某区域用地原型
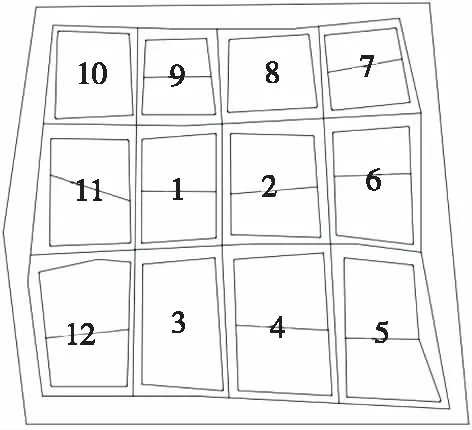
1~12为区域编号
3.2 研究场景参数标定
研究场景参数分为路网密度原模型中的参数,加入自动驾驶车流后改变的3个参数,分别为自动驾驶车辆平均载客数、不同自动驾驶车辆占比下出行方式占比和道路通行能力作用下部分参数取值发生的变化。针对该算例,各可变参数的初始值如下:道路面积率上限值Amax取25%;主干路、次干路、支路的宽度分别为40、20、17 m;干路网密度不小于3 km/km2;支路网密度不小于6 km/km2;各出行方式的占比见表3;研究区域范围为1 km2,各车型平均出行距离约为0.6 km。
运用考虑自动驾驶车流的路网密度模型计算高密度开发区域的合理路网密度。首先计算区域交通出行总量,结果见表4;然后以自动驾驶车流占比为40%时通行能力为例,将所标定的参数带入模型进行计算,得到合理路网密度与等级结构。
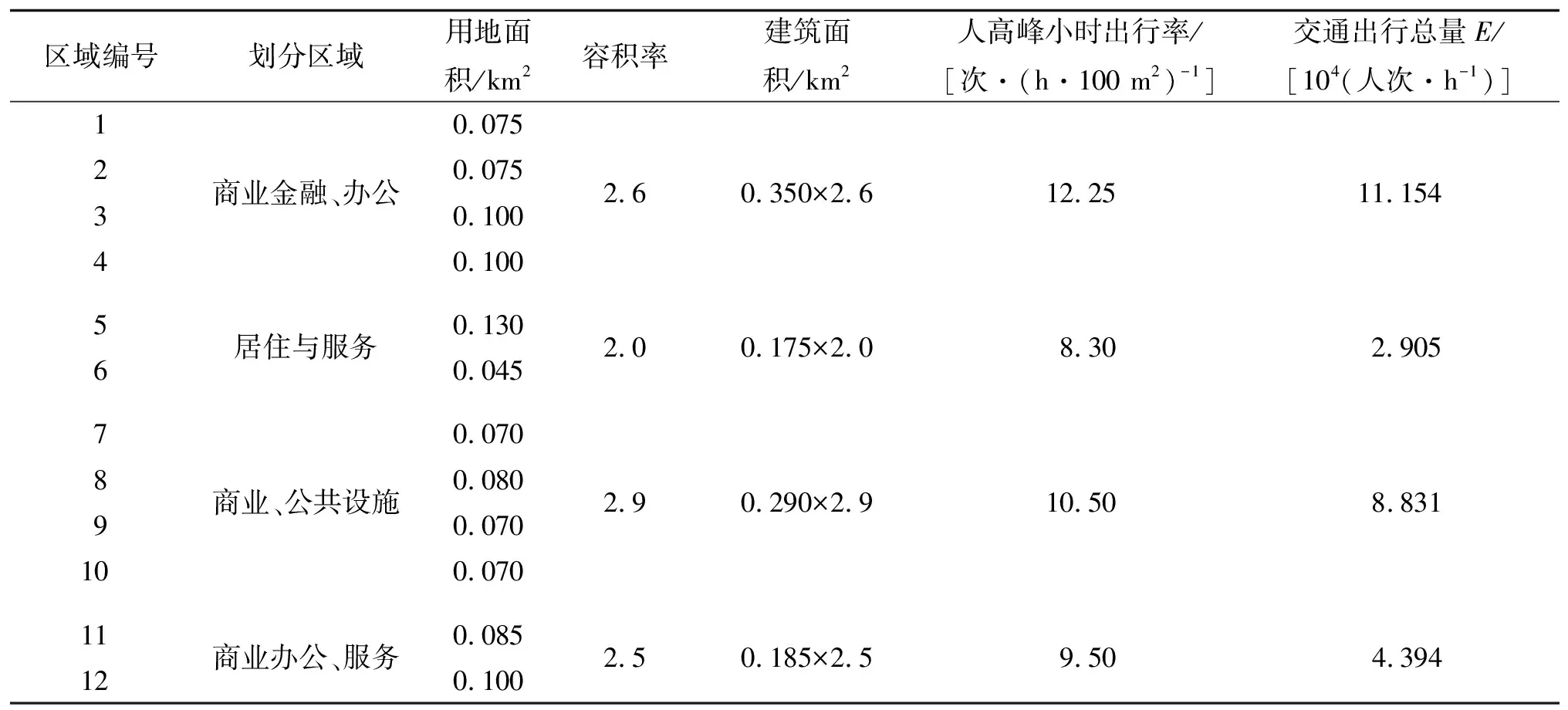
表4 各功能区域交通需求计算结果
研究区域的出行总量E=27.284×104人次/h,该区域为高密度、高强度开发的商务、金融服务区,在高峰小时会吸引大量交通流,区域内道路主要是服务于出行起终点为商务区的交通量,该模型计算时只考虑区域内交通,不考虑跨境交通,即D=D1。将上述参数代入式(1),得到该区域的交通需求总量D=66 725 pcu·km/h。路网密度模型的目标函数及约束条件为:
maxV=3 274.54L2+1 288.06L3+463.68L4
利用MATLAB工具箱里的linprog函数对模型进行求解,结果见表5。
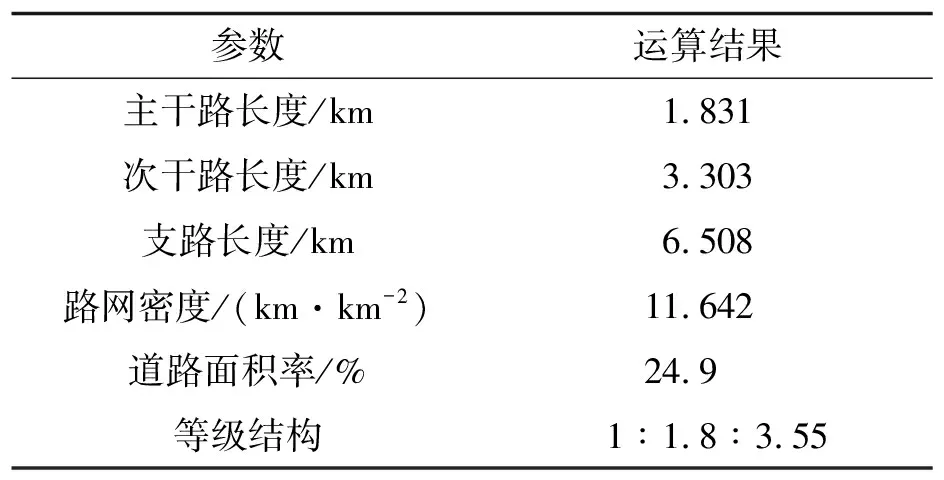
表5 路网密度模型的运算结果
4 参数改变时路网密度变化规律分析
根据模型的初值运算结果,分析路网密度对自动驾驶车辆平均载客数、不同自动驾驶车辆占比下出行方式占比和道路通行能力3个参数变化的敏感性。在各级道路服务水平下,道路通行能力随着自动驾驶车辆出行方式占比的变化而改变,可把它们放在一起考虑。以自动驾驶车辆平均载客数作为第一组参数,自动驾驶车辆出行方式占比和各级道路通行能力作为第二组参数,分别固定这2组参数,探究另一组参数变化时路网密度的变化规律。
4.1 不同自动驾驶车辆出行方式占比和道路通行能力时路网密度的变化
固定自动驾驶车辆平均载客数,分析自动驾驶车辆不同出行方式占比和道路通行能力对路网密度的影响。公交车、私家车(自动驾驶)、私家车(手动驾驶)、出租车(自动驾驶)、出租车(手动驾驶) 的平均载客数分别取30、1.17、1.67、1.7、2.2人/车,即取私家车(自动驾驶)1人/车、私家车(手动驾驶)2人/车、出租车2人/车,不同自动驾驶车辆占比下各级道路通行能力和各出行方式占比的变化分别见表3、表2,模型运算结果见表6。
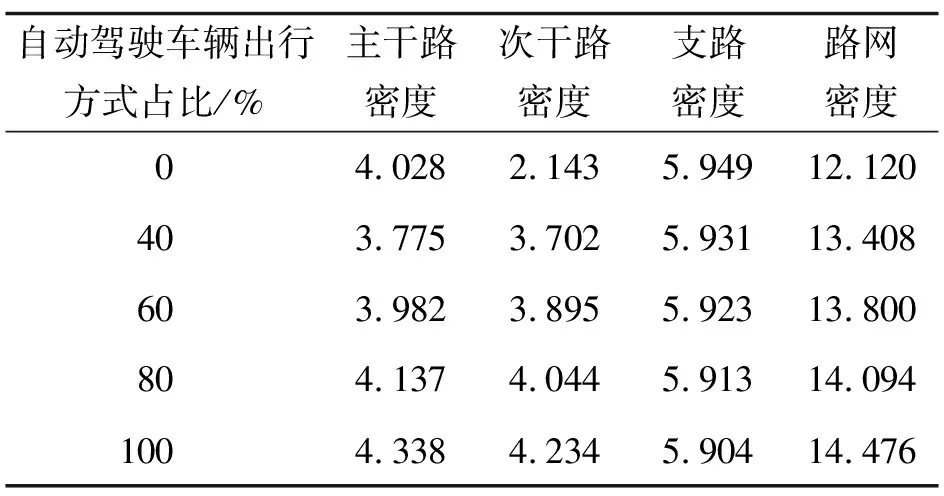
表6 不同自动驾驶车辆出行方式占比下 各级道路和路网密度 km/km2
由表6可知:在自动驾驶车辆平均载客数不变的情况下,随着自动驾驶车辆出行方式占比和各级道路通行能力的增大,次干路密度增大,主干路和支路密度基本不变,路网密度呈递增趋势。
4.2 不同自动驾驶车辆平均载客数时路网密度的变化
固定自动驾驶车辆出行方式占比和各级道路通行能力,分析不同自动驾驶车辆平均载客数对路网密度的影响,探究自动驾驶车辆平均载客数如何取值更有利于区域路网规划和城市发展。
由于不确定未来自动驾驶车辆的规格及政府会采取何种管理政策,对平均载客数设定以下3种情况:工况1为自动驾驶车辆平均载客数小于手动驾驶车辆平均载客数;工况2为自动驾驶车辆平均载客数与手动驾驶车辆平均载客数相同;工况3为自动驾驶车辆平均载客数大于手动驾驶车辆平均载客数。
固定自动驾驶车辆出行方式占比为40%时各类车辆出行占比和各级道路通行能力及服务水平,分析自动驾驶车辆平均载客数发生变化时路网密度,结果见表7。

表7 不同自动驾驶车辆平均载客数下各级道路和路网密度 km/km2
由表7可知:在自动驾驶车辆出行方式占比和各级道路通行能力不变、各级道路交通服务水平一致的条件下,随着自动驾驶车辆平均载客数的增大,次干路密度减小,主干路和支路网密度基本不变,路网密度呈递减趋势。
5 结论
(1) 影响区域路网密度的主要参数为自动驾驶车辆平均载客数、自动驾驶车辆出行方式占比和道路通行能力。
(2) 在自动驾驶车辆平均载客数不变的情况下,随着自动驾驶车辆出行方式占比和各级道路通行能力的增大,次干路密度增大,主干路和支路密度基本不变,路网密度呈递增趋势。
(3) 在自动驾驶车辆出行方式占比和各级道路通行能力不变、道路交通服务水平一致的条件下,随着自动驾驶车辆平均载客数的增大,次干路密度减小,主干路和支路密度基本不变,路网密度呈递减趋势。