商用车车道保持辅助系统设计*
2022-04-12刘春阳王张飞
詹 坤, 隋 新, 刘春阳, 王张飞
(河南科技大学 机电工程学院,河南 洛阳 471000)
0 引 言
车道保持辅助(lane keeping assistance,LKA)系统是当今智能驾驶汽车最具代表性的主动安全驾驶辅助技术之一,防止驾驶者因注意力不集中导致车辆偏离车道,辅助驾驶员操控方向盘使车辆回到车道线内正常行驶[1]。
近年来,随着交通智能化的不断发展,商用车对LKA技术需求也在日益增长。商用车不同于乘用车,其具有车身长、质心高、方向盘转角间隙大等特点,对于如何有效解决商用车系统高迟滞问题,实现车道保持功能并确保辅助系统安全稳定是重要研究内容。文献[2,3]采用简化预瞄模型,在车辆中心轴延长线取一个预瞄点,融合车辆状态和摄像头识别特性,通过建立横向位置误差和横摆角误差动态模型,实现车道保持功能;文献[4]采用远近视角驾驶员模型,通过前馈补偿模块,减轻了外部阻力对系统的影响;文献[5,6]针对挂车、拖车等非乘用车辆,在离散车辆模型的基础上,采用模型预测方法跟踪车辆期望轨迹。
文献[2~6]主要根据驾驶员特性和车辆模型设计车道保持控制器,其目的是尽可能减小系统迟滞带来的不利影响,但对于LKA系统的安全策略考虑较少。欧盟新车安全评鉴协会和国际自动机工程师学会的报告指出,LKA系统应充分考虑到控制系统的安全性和稳定性[7]。文献[8]解决了驾驶员与LKA系统的交互,并调整了干预级别,但并没有在实际道路上进行测试;文献[9]设计了决策策略和车道跟随控制器,但系统比较复杂,参数整定困难。
为解决上述问题,本文提出一种商用车LKA系统。根据车速、车道线置信度、车道曲率、驾驶员扭矩和车辆横向偏离距离等状态信息,设计LKA系统的激活策略,提高系统安全性;基于比例—微分(proportional differential,PD)控制算法设计辅助扭矩控制器,建立偏离纠偏和方向盘回正的仿人驾驶转向模型,采用扭矩控制策略,避免人机冲突,实现车道保持功能。最后通过仿真分析和实车测试试验验证该辅助系统的可行性、实用性。
1 控制策略与系统设计
1.1 系统结构
LKA系统结构如图1所示,车辆安装道路视觉传感器和方向盘转角/扭矩感器等,用于采集道路和车辆信息,如车速、方位角、曲率、车道线距离、方向盘转角和驾驶员扭矩等等。采用电子助力转向器(electric power steering,EPS)作为LKA系统的执行机构。

图1 LKA系统结构
图1中的横向控制器分为前馈控制和反馈控制两部分。前馈补偿模糊控制器主要补偿不同道路曲率ρ和路面附着系数μ等产生的误差,输出前馈补偿扭矩。反馈部分根据车辆横向偏差距离误差为输入变量,建立单点预瞄模型,输出预瞄点横向偏差距离;基于PD控制算法建立一种仿人驾驶转向模型,并设计辅助扭矩控制器,输出LKA助力扭矩。
状态决策策略模块主要是激活条件判断。根据车路信息,输出LKA激活系数β,决定LKA功能是否启动。β取值公式如下
(1)
若满足所有激活条件,则激活系数β大于0(即β=1),前馈补偿扭矩和LKA助力扭矩值叠加,经过扭矩限制模块输出助力扭矩,作用于汽车的EPS助力系统,形成闭环控制,最终实现车道保持功能;否则输出助力扭矩为0,系统不执行纠偏动作。
1.2 激活条件判断
LKA系统具有关闭、待激活和激活三种状态。当开关按钮关闭时,整个系统处于关闭状态;当开关按钮打开但不满足激活条件,系统处于待激活状态,不干预车辆行驶;当开关按钮打开且满足所有激活条件,系统报警提示驾驶员车辆发生偏离,并且输出助力扭矩操控方向盘,使车辆纠回原车道线内继续行驶。
实车测试试验中,由于道路环境复杂多样,且传感器检测精度有限,汽车报文丢帧、漏帧现象常有发生。考虑到系统安全性问题,需要对车速、车道线置信度、驾驶员实际扭矩、横向偏离距离和方位角等信息进行多帧报文判断。此外,若车辆开启转向灯,则认定驾驶员有意变道,LKA系统退出纠偏功能,转为待激活模式。多帧报文激活判定条件为
(2)
式中v为车速,km/h;C为车道线置信度;Td驾驶员实际扭矩,Nm;L为横向偏离距离,m;φ为方位角,rad;vth,Cth,Tth,Lth,φth为对应的阈值范围。
1.3 单点预瞄模型
商用车相对于乘用车而言,其方向盘转角间隙更大,控制系统具有迟滞性高、控制精度低等特点,且存在方向盘转角回正不足等现象。为避免建立复杂的非线性车路模型,减轻纠偏过程中系统的滞后和车身摆动幅度大等问题,本文采用改进的单点预瞄模型[10]。在车辆的前挡风玻璃中间位置安装ADAS偏离预警传感器,识别车道线并计算出传感器距离左右车道边线的距离值、车道曲率、车身方位角等车路信息。假设在未来一定时间内,车辆的方位角和车速均不变,且车轮没有发生侧滑,车辆会沿着当前行驶方向继续前行一段距离,这段未来时间内行驶的距离记为预瞄距离。预瞄模型示意图如图2所示。

图2 预瞄模型示意
车辆与车道中心线的夹角为车身方位角,车辆点C位置安装ADAS传感器。以车道中心线为横轴,以过点C且垂直于车道中心线为纵轴,建立笛卡尔坐标系。点C的纵坐标值即为ADAS传感器横向距离。在车辆行驶的正前方选取一个预瞄点D,则点C与点D之间的距离为预瞄距离。根据ADAS传感器测得的车道线距离和车身方位角可以计算出预瞄点处的横向偏差距离。
预瞄距离为
d=vxT
(3)
预瞄点D与传感器点C之间的横向距离之差为
ye=dsinφ
(4)
预瞄点横向偏差距离为
(5)
式中d为预瞄距离,m;vx为纵向车速,km/h;T为预瞄时间,s;yc为ADAS传感器的横向偏差距离,m。根据小角度假设定理可知,sinφ≈φ,故预瞄点横向偏差距离为
y=yc+vxTφ
(6)
1.4 辅助扭矩控制器
LKA控制器采用PD控制算法,仿照人工驾驶的行为特点,主要分为纠偏和回正两个阶段。当驾驶员在无意识状态下使车辆偏离车道中心线时,并且满足激活条件,LKA系统会执行纠偏动作。根据当前预瞄点横向偏差距离和方位角,PD控制器计算助力纠偏扭矩作用于EPS,保证车辆能够纠回原始车道线内。当车辆纠回车道中心线附近且方位角较小时,传感器检测方向盘转角大小,若转角不为0°,继续发送助力回正扭矩信号给EPS执行器,使方向盘回正,回正结束后维持车辆当前状态继续行驶。
在助力纠偏阶段,助力纠偏扭矩Ta大小为
(7)
式中Kp_pre,Kd_pre,Kp_azi,Kd_azi分别为横向偏差距离和方位角的比例—微分项系数。
在助力回正阶段,助力回正扭矩Tb大小为
(8)
式中Kp_ang,Kd_ang为方向盘转角PD项系数;Δθc为方向盘期望转角与实际转角差值。
1.5 前馈补偿模糊控制器
在实际道路环境中,路面附着系数μ、道路曲率ρ等条件对汽车的转向有一定影响。因此,在实车测试试验部分要考虑增加额外的辅助扭矩,减小外部环境因素的干扰。本文设计的前馈补偿模糊控制器以μ,ρ,v为输入变量,输出为补偿系数λ,其中助力补偿扭矩Tc=λTa,从而提高LKA系统性能[11]。
《小约翰》是荷兰作家凡·伊登的代表作,是一部寓意深刻、境界开阔的童话作品。故事讲述了一个叫小约翰的孩子,带着小狗,划着小船,独自离家,在奇妙的大自然里畅游,最终怀着对人类的爱回归现实生活。鲁迅对该书盛赞有加,称之为“无韵的诗,成人的童话”。
模糊规则如下:μ,ρ较大时,需要增大Tc;v较大时,需要减小Tc。设论域Uμ=[0.4,1.0]为μ的变化范围;论域Uρ=[0.001,0.003]为ρ的变化范围,rad;论域Uv=[25,90]为v的变化范围,km/h,其模糊子集均为{S,M,L}。输出量的论域Uλ=[0,0.6]为λ的变化范围,模糊子集为{VS,S,M,L,VL},分别表示较小补偿、小补偿、中补偿、大补偿、较大补偿。输入、输出均采用三角形隶属度函数,具体λ模糊规则见表1。
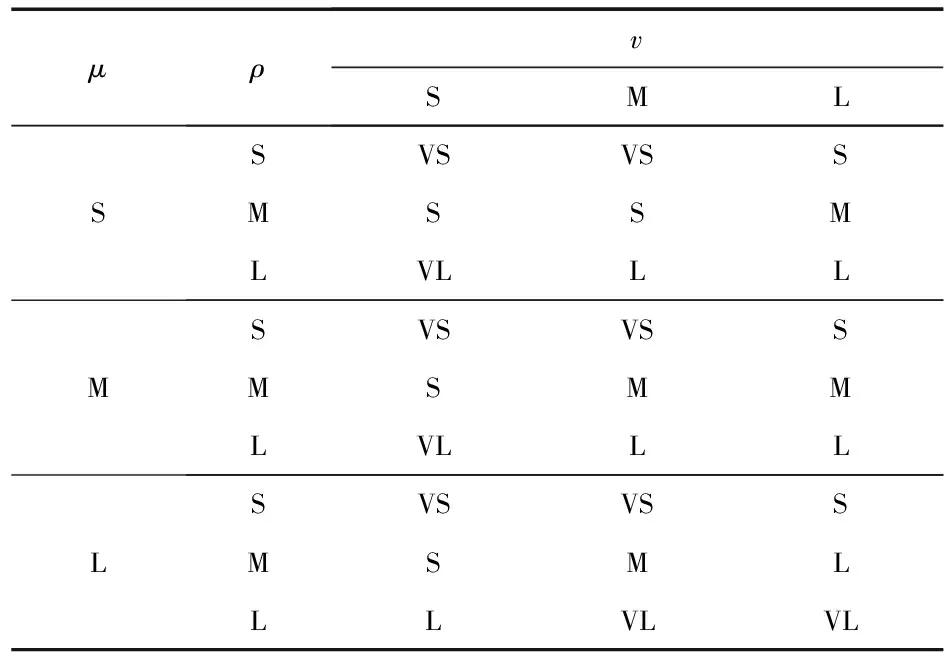
表1 模糊控制规则表
2 仿真实验
2.1 搭建模型与参数设置
为了验证所提辅助系统控制方法的有效性,进行了CarSim/Simulink联合仿真。在CarSim仿真软件中选用了Utility Truck车辆模型,构建参数化道路模型,设置扭矩为车辆模型的输入信号。在Simulink中搭建控制决策层、单点预瞄模型和PD控制算法模型,进行仿真研究,分析车道保持算法控制效果。
2.2 仿真结果分析
本文仿真车辆偏离纠回的运动状态,路面摩擦系数设置为0.85,助力扭矩限制范围为[-3.0,3.0]Nm,车速分别设置为60 km/h。基于单点预瞄模型PD控制算法的仿真结果曲线图如图3所示。其中图3(a)为车辆横向距离曲线图;图3(b)为助力扭矩变化曲线图。

图3 仿真实验曲线图
图3(a)车辆横向偏离距离为0.3 m处达到激活条件,图3(b)中的助力扭矩迅速增大,开始执行纠偏动作。约10 s以后,横向距离和助力扭矩均趋于0,车辆保持在中心线附近稳定行驶。从图3(a)车辆横向偏离距离曲线图可以看出,未加入预瞄模型时,系统超调较严重,纠偏过程中车辆震荡明显,一段时间后,车辆稳定在车道中心线行驶;加入预瞄模型,系统响应有预估量,纠偏过程相对较平缓。仿真实验表明:车辆偏离车道中心线,采用预瞄模型PD控制算法能够及时纠回车辆到中心线附近稳定行驶,实现车道保持功能。
3 实车测试试验
3.1 试验平台搭建
在CarSim/Simulink仿真基础上,模拟驾驶员无意识偏离车道线,进行实车测试试验[12]。如图4所示,搭建实车试验平台。

图4 实车试验平台
试验车选用江淮轻卡载货汽车,搭载有Mobileye 630车道线检测传感器、STM32控制板、电动助力转向器EPS。其中Mobileye630传感器用于检测车道线、计算距离左右车道线距离、车道曲率、车道线类型、车道线置信度等信息;STM32作为LKA系统核心处理器;电子助力转向器作为LKA系统的执行机构。各硬件系统间采用CAN总线连接。
3.2 实车试验
实车测试试验分为两部分进行,测试车辆在不同偏离方向情况下,探究有无预瞄模型对车辆运动的控制效果。其中试验1为车辆偏向左车道边界线;试验2为车辆偏向右车道边线。驾驶员疲劳驾驶或者分心驾驶时,操控方向盘的实际扭矩值很小,在实车测试试验中,驾驶员双手脱离方向盘模拟疲劳或者分心驾驶状态。实车测试结果如图5。

图5 实车测试曲线
如图5(a),(c)为车辆横向偏差距离,图5(b),(d)为一次纠偏回正过程中助力扭矩变化图。其中,点A为车辆发生偏离点,且达到激活条件,LKA执行纠偏动作,助力纠偏扭矩快速增加到扭矩最大值,使车辆横向偏离距离减小;在点B时,车辆纠回车道中心线附近,LKA系统开始执行方向盘回正动作,助力扭矩反向增加,使方向盘及时回正;在点C时,方向盘回正结束,车辆纠回车道中心线附近稳定驾驶,等待下一次偏离纠正动作。
对比分析有无预瞄模型的车辆横向偏离距离曲线图5(a)和(c),未加预瞄模型,车辆的最大横向偏离距离较大,距离范围分别为[-0.176,0.578]m和[-0.748,0.258]m;加入预瞄模型后,最大横向偏离距离范围为[-0.106,0.481]m和[-0.591,0.204]m。实车试验结果表明:在车辆发生偏离时,采用改进的预瞄模型PD控制算法能够可以减缓车辆纠偏过程中的震荡幅度,将车辆及时纠回车道中心线附近,实现了商用车车道保持功能,确保车辆安全稳定行驶。
4 结 论
本文将商用车作为研究对象,设计了LKA系统状态决策策略,引入判断是否启动LKA系统的激活系数,有利于提高系统安全性。采用预瞄模型和PD控制算法,最终实现车辆偏离纠偏功能。最后通过CarSim/Simulink仿真和实车测试试验分析,验证了该商用车LKA系统的可行性、实用性、安全性。
