基于三维激光扫描仪和全站仪技术的外立面测量方法
2022-04-11姚培军尹燕运
姚培军 尹燕运
(中兵勘察设计研究院有限公司,北京 100053)
0 引言
建筑物外立面测量是利用技术手段对已有建筑物的外貌、形状、高度、外部装饰等内容进行精确测量,并反映出建筑物外表面包含的门窗、阳台、台阶等内容的工作。
随着技术的发展,建筑物外立面测量方法有了多种选择。国内外技术人员对于建筑物外立面测量主要从采用合适的技术方法去提高作业效率层面进行研究。传统作业模式为:外业采用“全站仪+草图”的方法,使用全站仪免棱镜模式采集建筑物外立面细部特征点的三维坐标;内业将全站仪采集的数据进行坐标转换,绘制立面图[1-3]。国内技术人员对于采用地面三维激光扫描仪的方法进行了详细研究[4-10],地面三维激光扫描仪可以快速获取高精度、高密度的建筑物外立面几何特征点云,配合相关软件快速精确地绘制建筑物外立面图。
当前国内虽然已对两种作业方式有了较为全面的研究并对比了两种方法的优缺点,但两种作业模式相结合的研究比较少。当建筑物外立面结构复杂时,传统作业模式工作量大、效率低,不仅容易出错,而且不易发现错误。利用地面三维激光仪可以快速准确地进行外业数据采集,但遇到作业空间狭小、遮挡严重的情况时会有采集数据不完整的情况。
在实际工程中,将两种方式进行整合,形成一套以地面三维激光扫描技术为主、全站仪免棱镜技术为辅的工作流程,可以快速完成建筑物外立面测量任务,对类似工程提供参考指导。
1 技术路线
将建筑物不同的立面投影到与立面平行的铅垂面上,然后按照一定比例缩小而得到的正射投影图称之为建筑立面图,简称立面图[11]。立面图主要反映建筑物在垂直方向的各部分高度、艺术造型和外部装饰等特征[10]。一般情况下,立面测量的成果形成需要依托AutoCAD 平台的CASS 和天正软件[12],也可依托清华山维EPS 软件[13]。立面图上应将门窗、阳台、造型、屋面等都表示出来,利用尺寸标注、图例、说明等方式解释各部分相对位置关系及大小。
利用地面三维激光扫描仪获取建筑物整体点云数据、利用全站仪免棱镜技术进行局部补测,本文使用FARO Focus S 350 激光扫描仪进行建筑物外立面点云的获取,实现建筑物外立面测量的作业流程见图1。
2 实施过程
本文通过工程实例对实施的具体过程进行详细说明,并总结各环节应注意的问题。
2.1 现场踏勘
接受任务后,需要到现场进行踏勘,现场踏勘是重要的前期准备工作。如现场建筑物数量较多,应手绘建筑物分布略图,并在图中标注拟定地面三维激光扫描作业测站点。测站点位置的选择应符合以下五个要素:①测站点位置应视野开阔、行人车辆较少且距离建筑物不宜过近;②测站点之间距离应适当,以保证获得的点云有足够的重叠度;③测站点的布设位置应充分考虑建筑物外立面的结构变化处、屋面凹凸线、门窗位置等重点部位,如无法一站获取全部数据,应适当加设测站点;④扫描视线与目标夹角应尽量小[5],建筑物正面宜布设测站点,若现场环境不允许,可在需测立面的两个角点处布设测站;⑤对于建筑物高度较高的情况,应在距建筑物较远且较高处布设测站点,以保证建筑物上部点云数据的完整性。
踏勘过程中要重点查看建筑物密集、遮挡严重、作业空间狭小的区域,在这些区域附近选取合理位置布设全站仪架站点,施测过程中采用全站仪免棱镜模式进行补充测量。
踏勘过程中还应注意以下问题:①准确获取建筑物层数,并将层数标注在建筑物分布略图中;②必要的情况下,可提前确定靶标位置;③根据工作量大小及仪器电池工作时间,预估外业作业时间;④根据未来天气及工期情况拟定进场时间,需协调进场的要提前沟通。
2.2 现场作业
地面三维激光扫描仪作业一般需要两人,一人操作仪器,另一人需要尽量减少现场车辆及人员的走动对扫描的影响,必要的情况下需增加人员协助。根据现场踏勘初步选定的测站点位置,结合仪器仰角及遮挡物情况确定最终测站位置;根据建筑物表面结构的不同选择不同的扫描精度。FARO Focus S 350 激光扫描仪外业扫描作业可以采用无靶标作业方式,相邻两站之间需要保证一定的重叠度,重叠度建议达到10%以上。每站扫描结束后立即通过仪器屏幕检查扫描效果,如扫描效果明显不好需要检查原因并在此站重新扫描。遇到雨、雪等天气应尽量避免扫描作业。
对于现场能判断、确定的三维激光扫描仪无法测量的区域,采用自由设站[9]的方法架设全站仪进行免棱镜测量。宜选取精度不低于测角精度±2″,测距精度2 mm+2 ppm·D 的全站仪进行数据采集[14]。全站仪免棱镜测量时,应对扫描仪已采集数据区域的建筑物的特征点进行测量作为立面基准点,以方便内业进行坐标转换,如房屋下缘线两端点、具有显著特征的平面特征点等。
2.3 内业处理
2.3.1 点云数据处理
地面三维激光扫描仪采集的数据需要利用专门的软件进行拼接,将多个测站采集的点云合成一个单一有效的点云。不同品牌的扫描仪一般都有配套的数据预处理软件,如Riegl 扫描仪配套软件RiscanPro、FRAO 扫描仪配套软件SCENE、Trimble 扫描仪配套软件Trimble RealWorks、Leica 扫描仪配套软件Leica Cyclone 等[15]。
本作业流程以SCENE 软件为例,其数据处理流程见图2。
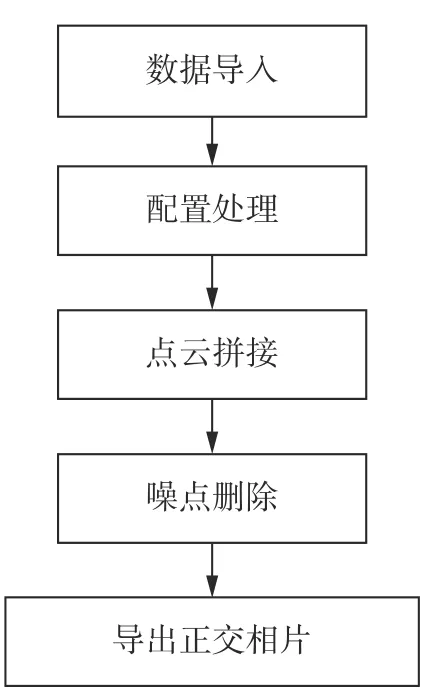
图2 点云数据处理流程图
使用SCENE 软件进行点云拼接,可以使用软件的自动注册功能。自动注册分为两步:第一步选择基于俯视图方法进行注册并验证,完成后查看三维视图和拼接误差报告,在报告中可以查看拼接精度;第二步选择基于云对云方法进行注册并验证,完成后同样可以查看三维视图和拼接误差报告。如果在自动注册的过程中通过三维视图发现拼接错误,或者拼接误差报告中点误差过大,需要选择手动注册。采用无标靶作业模式,在SCENE 中相邻两站可以标记两个共同平面外加一个共同点进行手动注册,两站手动注册后可以自动组成一个集群。手动注册需要注意:①标记的共同平面和共同点不要集中在一起,尽量分散;②共同面应尽量小,共同点应为同一平面内的特征角点且不宜选择有凹凸结构的角点;③合理利用集群功能,可以快速完成注册拼接。
在外业扫描时,树木、车辆、行人等所有能够反射激光信号的物体都被采集,为了提高数据质量及建筑物特征识别的精度,拼接完成后的点云需要进行冗余数据的删除。点云拼接效果见图3。

图3 点云拼接效果图
2.3.2 全站仪数据处理
全站仪数据的内业处理,最主要的工作是数据的坐标转换。坐标转换的方法有很多,向继平等[9]、何屹雄等[12]利用CASS 软件和Excel 表格相结合的方法进行坐标转换,数据处理原理相同,可以灵活选用合适的处理方法。根据其研究基础,经过实验,可以选择以下简便的方法完成全站仪自由设站采集数据的坐标转换:①将全站仪数据导出,整理成格式为“点号,,Y,X,H”的.dat 文件,将导出的文件导入CASS软件,做简单连线;②以外业采集的立面基准点一端为轴,旋转至水平方向,将旋转后的点生成数据文件并保存为.csv 格式;③用EXCEL 软件打开.csv 文件,用H 列的数据替换X 列的数据,后将H 列的数值全部修改为0,保存为新的.dat 文件;④将新的.dat 文件重新展点到CASS 中。
2.3.3 立面图绘制
利用已处理好的点云数据绘制立面图,主要有两种方法[5,8,16]:一种是三维的方法,利用Autodesk Recap 将SCENE 软件导出的.pts 格式点云转换成.rcp 格式,将.rcp 格式的点云数据导入到Auto-CAD 中,自定义UCS,选择需绘制立面的视图进行描绘。此方法是对点云数据直接进行量测,因此对电脑的性能要求较高,此外对作业人员的经验要求也较高。另一种方法是利用正交投影相片,SCENE 软件可以导出.tif 格式的正交相片,将.tif 格式的正交相片导入至AutoCAD 中可以描绘出立面图。此方法作业效率较高,操作简便易行。全站仪补充测量的数据,根据外业草图进行绘制。正交相片见图4。

图4 正交相片
在立面图绘制的过程中,需要注意以下几点:①建立合理的图层,不同的要素选用不用的图层颜色(见图5);②SCENE 软件可以导出每个测站的全景照片,绘制立面图时可以参考;③点云数据绘制的立面图和全站仪数据绘制的立面图,需要有公共点进行拼接。

图5 图层设置示例
经过以上步骤可绘制出建筑物外立面线划图(见图6),作业人员需对初图进行现场检查,如发现绘制错误或遗漏重要要素,需进行全站仪补测或少量皮尺量测。
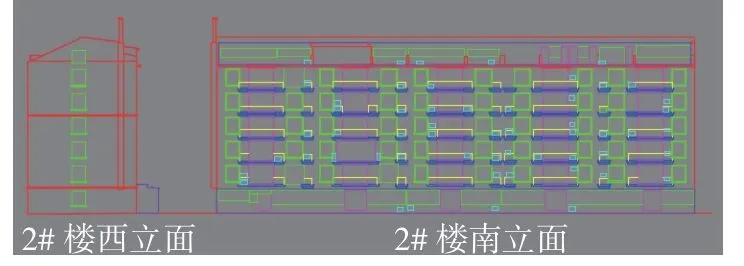
图6 建筑外立面线划图
3 结论
根据实践经验,总结了地面三维激光扫描仪结合全站仪进行建筑物外立面测量的流程及注意事项,得出以下结论:
(1)利用地面三维激光扫描仪进行建筑物外立面点云扫描快速高效地完成外立面点云获取,结合全站仪定点补充测量对点云数据不完整部分进行补测,可以实现建筑物外立面重要要素的坐标数据获取工作。
(2)内业充分利用点云处理软件和AutoCAD 相关软件,可以提高内业绘图效率。
(3)本文的工作流程方案,可以更好地为建筑物外立面测量工作服务,为类似工程项目提供参考。
(4)新技术的发展,带来了作业模式的更新,根据实际工作的不同,应选择合适的作业方式,如无人机测量。
