我国果园割草机发展现状与展望
2022-04-11赵武云陈伯鸿辛尚龙
杨 天,赵武云,陈伯鸿,辛尚龙,何 鹏,毛 良
(1.甘肃农业大学机电工程学院,甘肃 兰州 730070;2.甘肃农业大学园艺学院,甘肃 兰州 730070;3.陕西省农业机械鉴定推广总站,陕西 西安 710000)
0 引言
我国是水果生产大国,国家统计局资料显示,截至2018年底,我国果园面积达到1 187.487万hm2,水果产量2.57亿t,种植面积与水果产量均位于世界首位[1]。总体看,依旧保持渤海湾和黄土高原两大优势生产区域[2]。水果种植不仅是我国的优势产业之一,也是劳动密集型和技术密集型产业[3]。但是我国果园机械化水平整体较低,优势产区与非优势产区的综合机械化程度分别不到20%和10%,丘陵山地果园综合机械化水平仅5.75%,不能实现较好的机械化作业,制约了果园生产力的提高[4-5]。果园除草是果园生产中的重要环节,目前我国进行除草作业的方法大体可分为药剂除草、生物除草、人工除草和机械除草,大部分丘陵山地多为1 hm2以内的小地块果园,作业环境复杂,仍多采用人工除草的方式,劳动强度大,工作效率低[6-9]。近年来研究表明,采用果园生草栽培技术能提高土壤稳定性,改善土壤结构,增加孔隙度,降低土壤容重,还可以增加土壤的水分入渗能力和持水能力,为果树高效正常生长奠定基础[10-12]。鉴于我国果园有机质偏低、风蚀和水蚀现象严重的状况,大力推广生草覆盖技术,并提升机械化割草机控草技术,取代目前通用的清耕方法势在必行[13-17]。
针对果园割草机近年来的发展情况和技术问题,结合笔者对于甘肃省静宁县国家苹果试验基地及当地果园割草机应用情况的实地调研,针对矮砧密植型和乔砧适植型两种典型的果园种植模式,分析国内外目前果园割草机的发展和使用现状,探索我国未来果园割草机的发展思路。
1 关键部件与技术研究进展
1.1 切割装置
果园割草机对果树行间杂草的切割功能由割草机切割装置实现,切割装置的工作质量和稳定性对果园割草机作业质量起决定性作用。按照切割作业方式可以将果园割草机切割装置分为旋刀式、锤刀式和往复式等。其中旋刀式和锤刀式割草机在果园割草机中应用较为广泛,具有割刀速度快、结构简单、切割效率高、绿肥还田碎草效果好及能适应不同种类杂草切割等优点,不足之处是割刀转速高,导致功率消耗较大。往复式割草机主要应用于果园杂草回收饲用,作业后割茬整齐,杂草铺放整齐,便于农户对已切割杂草进行收集用作饲料,该类割草机作业效率较低,且振动较大,用作绿肥还田作业时碎草效果较差。
王志强等[18]研制了一种果园行间割草机,割草机采用锤刀式切割装置,由机架、悬挂机构、罩壳、变速箱、胶带轮、刀座、刀轴、碎草刀和压草辊等主要部件组成,整机工作幅宽1 300 mm,刀轴转速1 900 r/min。该割草机选用甩刀型锤刀式碎草刀,排列方式为单螺旋线排列,相邻刀座间距63 mm,径向夹角72°,经田间试验验证,该割草机碎草作业后草段长度≤100 mm的草段占总草段数的90%以上,绿肥还田效果好,如图1所示。

图1 果园行间割草机Fig.1 Orchard row mower
张雯[19]研制了一种果园小型圆盘式割草机切割装置,切割装置由横向切割部件和纵向切割部件组成,横向切割部件采用单刀盘重载的设计,纵向切割部件采用圆盘式大刀片的设计。纵向切割系统的刀片最低点与横向切割系统刀盘共面,可以防止漏割,如图2所示。

图2 果园小型圆盘式割草机Fig.2 Small disc orchard mower
熊永森等[13]设计的小型往复式果园割草机,割草机与主机采用单点连接,动力机通过三角胶带传动驱动刀片,在曲柄转速650 r/min的速度下做往复切割运动。试验表明,割草机结构简单,操作方便,仿形效果好,如图3所示。
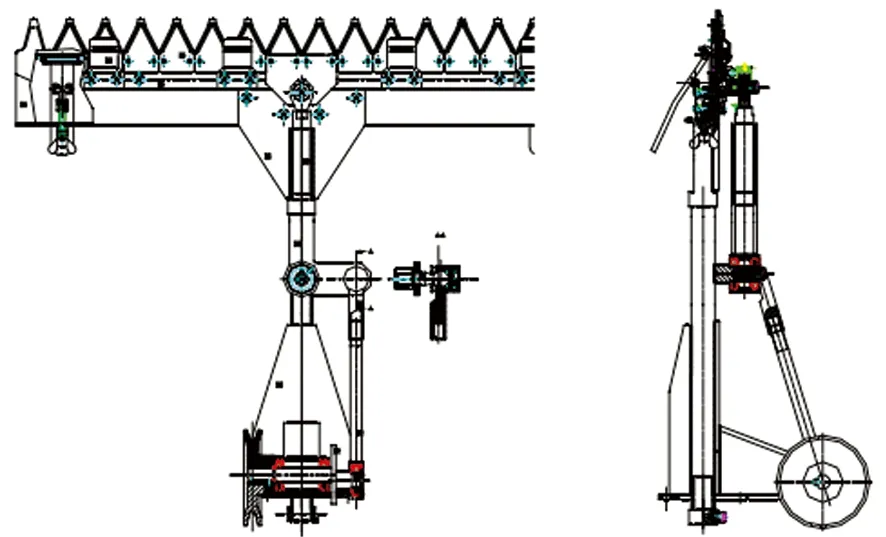
图3 小型往复式果园割草机Fig.3 Small reciprocating orchard mower
1.2 行走系统
果园割草机由于行走系统不同可分为牵引式和自走式两种,其中自走式割草机又可分为轮式和履带式两种。牵引式果园割草机由拖拉机牵引作业,一般采用三点悬挂方式安装于拖拉机后方,由拖拉机提供动力,此类割草机割幅较大、质量大、功耗大且作业效率高。自走式割草机由驾驶人员乘坐或手扶进行割草作业,是未来割草机行走系统的发展趋势。自走式割草机工作不依赖拖拉机,整机质量小,灵活性好。轮式割草机可以实现平原地区各类型果园的高效割草作业。履带式割草机可以完成丘陵山地地区坡度较大、作业环境较复杂的果园割草作业。
王鹏飞等[20]设计的随行自走式割草机,整机由发动机、机架、变速箱、刀盘、切割刀、割刀离合、行走离合、驱动轮及割茬调节系统等组成。工作时,发动机分别为割草机行走系统和切割装置提供动力,行走系统驱动割草机行走,速度变化依靠驱动桥完成。割草机作业速度3~5 km/h,作业幅宽600 mm。田间试验表明,该割草机工作性能良好,杂草撕裂率0.47%,漏割率1.50%,杂草碎段区域平均长度79.39 mm,碎草性能较好,工作效率达0.5 hm2/h。整机结构如图4所示。
高巧明等[21]设计了一种全履带模块化无人农用动力底盘,整机高度1 200 mm,可通过4点螺栓固定割草机进行果园割草作业。该行走系统最小离地间隙410 mm,接近角与离去角达到45°和30°,作业幅宽1 300 mm,可通过电动机械双功率差速转向机构实现整机360°原地转向,适用于丘陵山地果园割草作业,但由于动力底盘高度过高,导致部分乔砧果园无法作业。整机结构如图5所示。
1.3 仿形装置
割草机仿形装置的作用是保证割草机通过性的同时保持割茬高度均匀,防止割刀碰触地面杂物出现损坏,保证割草机高效作业。我国割草机仿形装置的设计研究起步较晚,同时我国果园多分布于丘陵山地,地况较复杂,更需要可靠的仿形装置来保障割草机的安全作业。

1.前轮 2.机罩 3.割刀离合 4.发动机 5.扶手 6.行走离合 7.挡杆 8.割茬高度调节杆 9.机架 10.驱动轮 11.割刀 12.排草口 13.刀盘 14.刀罩图4 随行自走式割草机Fig.4 Walking lawn mower
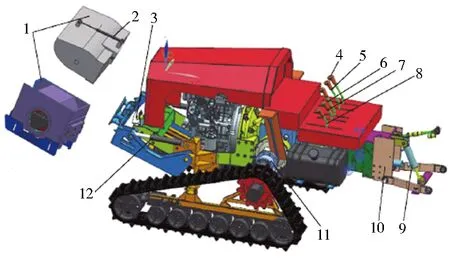
1.前置属具 2.前置属具调节液压缸 3.液压快接头 4.左右转挡位 5.前进倒退挡位 6.高低速挡位 7.基架横梁液压缸升降挡位 8.制动挡位 9.后悬挂调节液压缸 10.PTO 11.差速转向机构 12.基架横梁液压缸图5 全履带模块化无人农用动力底盘Fig.5 Full track modular unmanned agricultural power chassis
邬备等[22]研制了一种小型自走式割草机仿形装置,通过对滑掌、连杆臂、浮动弹簧和提升液压缸等部件的运动学分析与仿真,通过田间试验验证了在同等工作条件下,应用仿形装置的割草机割茬高度降低了7%,工作速度提高了75%,如图6所示。

图6 小型自走式割草机Fig.6 Small self-propelled lawn mower
荆龙龙[23]研制了一种山地果园仿形割草机的仿形机构,由多个仿形单体构成,每个仿形单体由机架、仿形架、软轴、地形轮、刀盘和刀盘轴等组成。各仿形单体的仿形架长短不同。割草机作业时,仿形轮在移动过程中实时感知地面起伏变化,将地面高低起伏的变化信号传递给仿形架,使得仿形架在铰接点处不断作摆动运动,并调节切割装置高度进行仿形割草,通过动力学仿真验证,仿形机构上的切割装置前后端点均不与地面发生碰撞,仿形机构设计合理,如图7所示。
1.4 导航、避障、自动识别技术
1.4.1 避障技术
避障技术能够使割草机一次性完成果树行间与株间割草作业,同时防止割草机碰撞果树导致果树受伤及机具损坏,割草机避障技术的有效应用能较好地提升割草作业效率、保护果树及机具作业安全。
贾耀文[24]设计了多功能果园避障割草机,其避障装置由电动推杆和转向连杆组成。割草作业时,当激光扫描仪检测到树干时,避障电动推杆伸长,左右侧刀盘绕定轴逆时针旋转,避开果树枝干,通过枝干后,避障电动推杆收缩,左右侧刀盘快速绕定轴顺时针旋转,左右侧刀盘继续除去树干间杂草,避障完成。左右侧避障刀盘根据不同的果园种植模式,可以实现变幅值除草和避障除草。避障装置如图8所示。
尹宏超[25]基于模糊控制设计了割草机避障系统,进行了前伸式机械避障机构的方案设计。在考虑机械干涉等问题的前提下,弧形臂长度设计为1 000 mm,前伸400 mm,水平中心距离地面200 mm,试验表明,所设计的机械避障机构在触碰到障碍物后能及时进行位置回复,卡顿率仅为10%,弧形臂旋转后回位效果较好,误差<5°,对障碍物的探测效果良好,如图9所示。
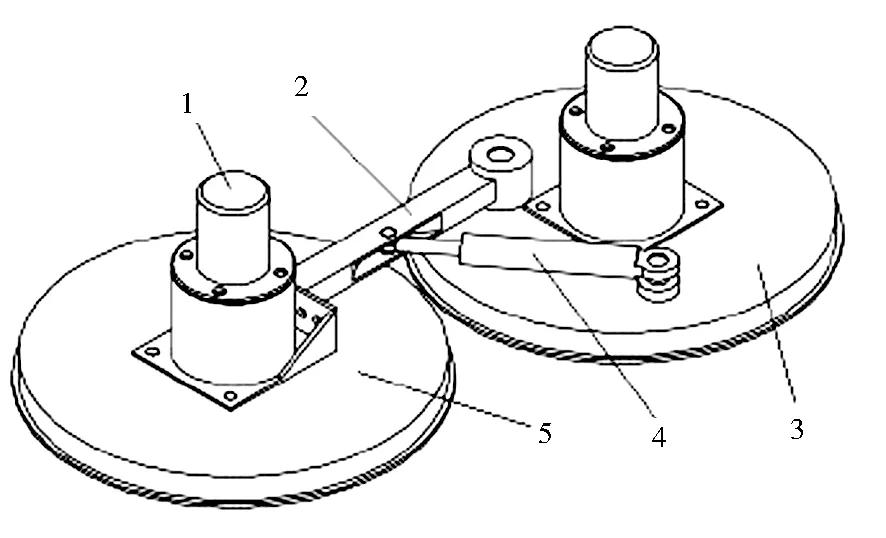
1.除草电机 2.转向连杆 3.固定刀盘盖 4.电动推杆 5.避障刀盘盖图8 割草机避障装置Fig.8 Obstacle avoidance device for lawn mowers

图9 小型自动避障割草机Fig.9 Small automatic obstacle avoidance mower
陈凯等[26]进行了果园自动避障割草机前架设计与仿真,基于激光雷达实现非接触式避障割草算法,并基于算法设计了避障前架和非接触式自动避障割草机。
1.4.2 导航及自动识别技术
导航技术及自动识别技术是网络信息技术应用于果园割草机的产物,可以使割草机作业更加智能化及自动化,未来实现无人化割草作业,大大减轻劳动力短缺带来的各种问题,使得果园割草作业向高效、智能化方向快速发展。
艾永平等[27]进行了基于机器视觉的割草系统青草识别研究,该研究利用SSD算法模型赋予割草机机器视觉,割草机系统能自动识别青草在图片中的坐标,然后将青草在图片中的位置坐标用算法映射为现实青草所在位置坐标,割草机再进行自动除草,如图10所示。

图10 青草识别割草机Fig.10 Grass identification mower
2 国内外发展现状
2.1 国外发展现状
国外早在20世纪40年代就开始进行果园割草机的研究制造,经过几十年更新换代,现已发展成集自动化、智能化和现代信息技术于一体的果园割草机,同时农机农艺融合问题得到解决,使得果园专用割草机能够很好适应果园机械化除草要求[29-30]。果园割草机根据其工作方式可以分为牵引式(牵引式、悬挂式和半悬挂式)和自走式(乘坐、手扶)两种。根据不同的使用需求可选择不同种类的割草机,牵引式割草机适用于平原地区矮砧密植型果园,功率大,割幅宽,作业高效,但由于作业过程需要拖拉机牵引导致转弯半径较大,需要较宽的果树行距与转向空间。自走式割草机适用于丘陵山地割草作业,此类机型整机轻便、灵活,爬坡越障及频繁转场能力更强,但割幅较小,作业效率相对较低。
欧美等国家地势平坦,采用矮砧密植型果园种植模式,此种模式果树行距能够达到3.5 m左右,对应此种作业条件,牵引式割草机能够高效完成行间割草作业。如471/488/499/1465型割草机,均可选配可调节角度的刀片保护装置,防止割草机堵塞,自动化程度高,操作方便,结实耐用,可切割潮湿杂草[30]。630型割草压扁机如图11所示,割幅3 m,切割角度、割茬高度均可液压调节,作为牧草收割机的同时亦能实现矮砧密植型果园的割草作业,同时可以实现绿肥还田功能,还可收割果园杂草作为青饲使用。H7220/7230型圆盘式割草压扁机能在2°~10°范围内调节割草机切割角度以实现不平坦地块割草作业,配套切割器所装配的圆盘驱动毂能吸收作业中撞机导致的机具振动,保证作业安全,最高作业速度可达14.5 km/h。牵引式割草机多为牧草收割机改进而成,具有结实耐用、切割角度方便调整和作业效率高等优势,但由于需要拖拉机牵引作业,导致该类割草机转弯半径大,灵活性较差。国外部分牵引式果园割草机主要技术参数如表1所示。

图11 630型割草压扁机Fig.11 630 mower-crusher

表1 国外部分牵引式果园割草机主要技术参数Tab.1 Main technical parameters of some foreign traction orchard mowers
自走式割草机如图12中的8800A型五联旋刀割草机,整机机身宽度2.18 m,割幅2 230 mm,动力强劲,5个可调节刀盘使其拥有很强的地形适应能力,同时具有强大的爬坡越障能力。GTM1350EVO型乘坐自走式割草机轻巧灵活,能实现速度的无级调节,结构简单,操作方便,比较适用于草坪的割草作业,但果园环境复杂,该割草机割刀结构、材料不适用于果园割草作业[31]。9GZ-221型果园乘坐割草机具有速度快、作业通过性强和效率高的优点[9]。CG101型手扶履带式割草机,机械宽度1 m,高度1.05 m,割幅800 mm,采用锤片式割刀,具有良好的割草性能,如图13所示。自走式割草机由于整机体积较小,转向灵活,在果园内通过性和适用性较强。

图12 8800A型五联旋刀割草机Fig.12 8800A Five spin lawn mower

图13 CG101型手扶履带式割草机Fig.13 CG101 walking crawler mower
国外部分自走式果园割草机主要技术参数如表2所示。

表2 国外部分自走式果园割草机主要技术参数Tab.2 Main technical parameters of some self-propelled orchard mowers abroad
2.2 国内发展现状
目前采用矮砧密植的新果园,由于果树行距较大,建园初期在地头留有机器转向空间,用牵引式割草机或乘坐式割草机便能轻松高效地完成果园割草作业。同时,带有自动避障装置的果园割草机已逐渐投入使用。长期以来,由于受大田主粮种植模式的影响,我国果园种植多集中在丘陵山地,现存大量的乔砧适植老果园仍采用清耕作业模式,对此种种植模式的果园专用除草机械的使用和研发重视程度较低[31-33]。近年来,我国在推行生草覆盖技术的过程中,国内的乔砧适植型果园割草机也迅速发展起来,出现了一些符合使用需求的自走式割草机、多功能田园管理机及小型背负式割草机[34-35]。
牵引式割草机主要由牧草收获机械改进而成,近年来,逐渐出现了针对果园的相关产品[36]。如河北农业大学研发的3GC系列拖拉机后悬挂正置式、偏置式和调幅式割草机,针对矮砧密植型果园,可选割草幅宽1 200~2 100 mm;针对垄面草体切割困难的问题,采用兼顾平地、垄面割草功能的设计,主盘切割行间草体,侧盘可随垄面仿形并处理斜坡杂草,完成小行间距割草作业[37]。马攀宇[38]设计研发的山地果园仿形割草机,切割方式采用支撑切割的甩刀式切割器,6组刀盘组合的割幅宽度1 700 mm,切割性能良好,割幅利用率92.9%。酒泉市铸陇机械制造有限责任公司生产的9GWH-1.8型往复式割草机,动力连接方式为悬挂式,割幅1 800 mm;9GXS-1.65型旋转式双圆盘割草机,动力连接方式为悬挂式,割幅1 650 mm[30]。中农博远农业装备有限公司研制的9G/9GS/9GSP系列割草机可与22~60 kW的拖拉机配套作业,碎草可侧排,切碎效果较好,其中9GS系列割草机采用双刀盘切割结构,转弯半径更小;还有9GB-2.1型往复式割草机等产品。国内部分牵引式果园割草机主要技术参数如表3所示。

表3 国内部分牵引式果园割草机主要技术参数Tab.3 Main technical parameters of some domestic traction orchard mowers
随着果园生草覆盖技术的推广,与应用在矮砧密植型果园基本成型的牵引式割草机不同,果园种植集中的我国丘陵山地地区迫切需要小型自走式割草机。广西玉柴农业装备有限公司设计生产的GC45/225型自走割草机,由机架、发动机、离心离合器、动力轴、驱动轮组件及刀具组成。该机型发动机为汽油发动机,发动机通过离心离合器与动力轴连接。离心离合器在发动机转速达到预设值时进行传动,带动割刀进行工作,并通过传动机构与离心离合器的离合器外壳连接,以驱动割草机行走。该机型小巧轻便、工作效率高、作业效果好,但该机型只有前进挡没有后退挡,且无动力转向,工作时需要人工手扶作业,遇到作业环境较矮的地块无法进入,并没有完全降低劳动强度,无法保证全程机械化作业,如图14所示[39]。安志辉[40]发明了一种四轮驱动的遥控割草机,包括底盘、机架、驱动轮、发动机、4个直流驱动装置、发电机、控制器和遥控机等,4个驱动轮分别固定于对应4个直流驱动装置的动力输出轴上,4个直流驱动装置由控制器分别独立控制,该机型实现了遥控操作,并且可以自如向前、向后行走和转向,优化路径,割草效果较好,不足之处是机组质量较大、工作速度低、割幅小和生产制造成本较高,部分个体小果园农户无法承担。王鹏飞等[20]设计了随行自走式果园割草机,该机采用双离合机构,能够实现机具行走与各操作分别控制,手动控制行走可以实现操作人员随行,工作性能良好,漏割率1.5%,工作效率可达0.5 hm2/h。该机结构设计合理,但是并未真正实现随行自走,虽然设计拥有后退挡位,但是转向仍需人工手扶操作,并未实现真正的随行自走式的自动化、智能化割草作业。

图14 GC45/225型自走割草机Fig.14 GC45/225 self-propelled lawn mower
多功能田园管理机由传统的手扶拖拉机改进升级而成,可挂载旋耕机、割草机和开沟机等多种农具,由于工作动力不足等问题,易造成漏割或割草效果不好,导致多次作业带来额外功耗。小型背负式割草机需要人工携带进入果树行间进行作业,不仅劳动强度大,而且容易伤害作业人员。国内现阶段主要应用的果园割草机类型及优缺点如表4所示。
利用MCNP程序,计算了不同黑体温度的X射线照射圆柱腔体时的电子发射参数,包括光电产额、出射电子角分布和出射电子能谱,可以为SGEMP的计算提供较为准确的电子发射信息。

表4 国内果园割草机主要应用类型及特点Tab.4 Main application types and characteristics of domestic orchard lawn mower
3 国内外割草机发展对比
3.1 国外割草机特点
欧美等国家的果园种植模式多采用矮砧密植型,农机农艺融合基本完成,割草机作业空间相对开阔,能够满足大中型标准化机械除草作业。目前无论是拖拉机挂载专用割草机还是自走式割草机都能轻松完成果园内的高效割草作业,且在实现割草机械化的基础上已经开始了信息化、自动化的研究与相关应用。日本等国家的果园种植模式多为乔砧适植型,农机农艺融合进程开始较早,根据割草机作业需求,果园行距与株距均根据割草机作业需求预留,果园管理精细,果树离地第一主枝较高,保证了乘坐式割草机的通过性,能实现果园割草作业全程机械化。国外割草机在生产中实现了机、电、液一体化技术的综合应用,割草机智能化技术有了长足发展,在割草机的使用便捷性和工作效率上远远领先国内割草机,并且在电子信息发展进程中开始了信号自动识别、自动避障和自动化作业,割草机全方位自动化作业进程已实现。
3.2 国内割草机特点及存在的问题
国内果园割草机研究起步较晚,近年来,随着生草覆盖技术推广,割草机发展也呈现良好势头。由于受制于大田种粮影响,更适合于标准化机械作业的矮砧密植型果园仍在逐步推广,位于丘陵山地地区的乔砧适植型果园仍将长期作为我国果园的主要种植模式。这导致我国在割草机研究与发展中需要同时兼顾适应两种种植模式,国内牵引式割草机相对起步较早,品种较多,基本能够满足矮砧密植型果园的使用需求。国内牵引式割草机与国外产品相比,在割幅、刀盘数量和作业角度适用性方面仍有差距,同时由于功率较小导致作业效率相应较低,因此,我国果园牵引式割草机仍需继续在技术研发和设计制造方面进一步提升。自走式割草器由于国内起步较晚,产品种类虽多,但质量与可靠性均不过关,智能化和信息化仍处在研究阶段,并未投入实际生产使用,同时我国的乔砧适植型果园多集中于丘陵山地,国内已投入生产使用的割草机在丘陵山地果园中大都无法满足恶劣的作业条件,仍需要突破相关技术瓶颈。
近年来,通过引进国外果园割草机先进技术,加强自主研发能力建设及技术升级,我国果园割草机械化水平已经显著提高,但是,我国果园割草机械化总体水平和生产制造水平与发达国家仍有一定差距,主要体现在以下4点。
(1)农机农艺融合较差,小型自走式割草机研发滞后。两种种植模式的果园大多在初始建园时并未考虑机械化作业需求。矮砧密植型果园会出现牵引式割草机由于割幅与行距不匹配导致多次作业的问题;乔砧适植型果园由于现有割草机体积、质量较大,果树第一主枝离地间距过小,割草机无法进入果园作业,乘坐式小型割草机仍未得到有效应用。
(2)生产技术水平低,产品质量参差不齐,可靠性较差。割草机制造质量不达标、产品耐用性不强和功耗大使所生产的割草机在实际使用过程中出现各种质量、安全问题而影响使用,不利于割草机长远发展。
(3)割草机作业速度与割刀工作速度不匹配导致作业质量不佳。不论是旋转式还是往复式割刀,国内割草机仍未彻底解决机具作业速度与割刀工作速度的合理匹配问题。割草机作业速度过快将导致割草机割草作业不彻底,出现漏割;割刀工作速度过快时,在割草作业中出现重割。两种情况都会产生额外的功耗损失。
(4)未有效应用高新技术。集成了智能化、自动化和信息化等高新技术的果园割草机在我国仍处于实验室阶段,目前国内还没有真正具有较高智能化、自动化和信息化的果园割草机。
4 国内割草机发展展望
随着果园生草覆盖技术大面积的推广,我国果园割草机取得了一定程度的发展,但在研发生产中仍有较大缺口,国内割草机在机具创新性、可靠性、通用性和智能化程度方面均远远落后于国外。结合上述提到的我国割草机发展存在的问题,我国未来针对矮砧密植型和乔砧适植型两种种植模式,需保持各种类型割草机齐头并进的发展趋势,未来应主要针对以下方面展开研究。
(1)加强农机农艺融合建设。矮砧密植果园多位于平原地区,在建园时应保证标准化,给牵引式割草机预留作业通道。乔砧适植果园多位于丘陵山地,新建园应保证自走式割草机作业空间,加强果园种植期间的精细化管理,确保种植期作业通道畅通。对于老旧果园,应采取间伐、修枝等手段为割草机作业创造条件。
(2)提升割草机研发技术水平和生产制造水平。在未来研发制造中,牵引式割草机应充分考虑割草机割幅与果园行距的匹配问题,同时加强自动避障、割茬高度自动调节等实用功能的研发工作,提升割草机通用性和耐用性。自走式割草机应在保证割草机通过性、爬坡越障性能的同时,提升割草机耐用性,合理选择整机材料及割刀材料,提升整机制造质量、割刀使用效果和使用寿命。
(3)在设计初期合理匹配割草机作业速度与割刀工作速度。牵引式割草机应充分考虑配套拖拉机的输出转速,结合自身传动系统匹配合适的动力以实现高效作业。自走式割草机在整机设计中,应保证传动比合理,确保发动机驱动割草机前进的同时保持一定的割刀转速。
(4)在割草机设计、研发和制造过程中利用虚拟样机等新技术,节约物理样机的研发制造成本,缩短研发周期。
(5)将网络信息技术更多应用于割草机产品中。将智能化、自动化和信息化等新兴技术更快、更好地应用在割草机制造中。尽早研制出能够自动识别、自动避障和自动规划路径的高效自主作业的果园专用割草机,同时加强割刀仿形等安全装置的优化,确保割草机的工作稳定性。
5 结束语
随着我国果园生草覆盖技术的逐步推广,对果园割草机的实用性和作业质量提出了更高的要求。研发能够适应多种种植模式、制造水平先进、工作质量可靠和集自动化与智能化于一体的果园割草机成为未来果园机械化除草装备的发展方向,从而更好地推进除草机械化进程。
