一种车载相控阵天线波控系统设计
2022-04-04石彬黎刚果
石彬 黎刚果
摘要:描述了波控系统的工作流程,从功能设计、软件设计和控制算法等方面介绍了一种典型的车载相控阵天线波控系统设计方案。针对工程应用过程中出现的平台运动对波束指向产生影响的问题,提出了波束电子稳定措施,确保了空间指向的准确性,解决了波束跃度等问题,给出了波束电子稳定和最小波束跃度的具体措施,同时对减小波束跃度的虚位技术进行了展望。
关键词:相控阵;波控系统;移相器;波控码
中图分类号:TP361文献标志码:A文章编号:1008-1739(2022)03-62-4

0引言
相控阵天线通过控制阵列天线中辐射单元的馈电幅度及相位来改变方向图形状,它的馈电幅度相位一般通过电子计算机控制,具有波束指向、波束形状变化快捷精确等优点[1]。系统工作时,通过波束控制系统控制天线各单元的相位,完成天线波束的电控扫描[2]。波控系统的主要功能是根据方位及俯仰角初始信息,应用布相算法来完成天线配相运算和实时输出,通过改变阵列中各天线阵元的相位关系,实现改变阵列天线方向图波束指向的目的[3]。因此,波控系统是相控阵天线的核心控制系统,在相控阵天线中起着至关重要的作用。
1波控系统工作流程
系统采用双通道单脉冲自跟踪体制。根据波控码选择工作的子阵、和差器形成整阵级和信号、方位差信号和俯仰差信号。角误差信号经射频耦合网络和下变频器送至基带分系统,最后将解调出的方位角误差电压送到波控分系统。
波控系统接收并处理角误差信号,根据波束控制策略控制天线指向。在自跟踪状态下,波控系统将根据设备的状态,依据电压-角度编码规则将角误差电压转换为角度信息。在程序及数字引导状态下,波控系统需要对接收到的波束指向角信息进行坐标变换和姿态补偿,使波束指向目标运动方向。波控系统根据计算得到的角度信息,由波束控制策略得到波束的工作子阵,送出相应的电平信号控制相控阵天线各接收组件的开关,并控制移相器的偏移相位,从而保证波束准确地指向多个预定目标[4]。同时,可以利用单刀双掷开关选择左、右旋信号。波控系统工作流程如图1所示。

2波控系统设计方法
2.1功能设计
波控系统主要功能是与基带分系统配合,实现波束切换和控制、阵面状态监测及幅相一致性校准,统一管理阵面各子波控器,分配任务、协调整个系统工作。
2.1.1波束控制
相控阵天线装备在车体顶部,与方舱进行拱形设计,受载车运动的影响,天线阵面的坐标系也随之产生相对运动,天线阵面坐标系与大地坐标系不再一致。为了补偿车体运动的影响,需要对波束指向进行动态修正。
在波束控制过程中,波控系统从基带接收角误差信息,从定位定向与测姿设备实时获取车辆位置和姿态信息,依据电压—角度编码规则换算成二维的角度信息,并在运动中实时进行指向角修正,最后由波控策略得到子阵切换指令。指向角度及子阵切换指令发送给子波控器,由波控器控制天线阵元的工作。
2.1.2子波控器同步
波束控制中的另一个核心问题是各子波控器间的同步问题。各子波控器接收到波束指向角,波控码计算完成后需要一个统一的同步信号来同时更新天线阵面上所有移相器的相移量。同步信号发送给各子波控器,保证了信号到达各子波控器的精度。
在这种工作模式下,波控分系统的工作过程是:基带分系统由角误差信号给出四路角误差信号,波控系统根据搜索或跟踪的要求,给出波束指向的俯仰角、方位角以及阵面切换指令,并广播传送给阵面上的各子波控器。各子波控器收到波束指向角信息后,数字信号处理器根据子波控器自身的位置信息进行坐标变换,并快速計算出子阵中每个天线阵元的移相值。计算完毕后,子波控器将波控数据发送给对应的天线阵元。各天线阵元收到相应的波控数据后暂时将各移相器的波控码进行锁存。当所有天线阵元的波控码发送完毕后,子波控器将来自波控系统的同步信号发给各移相器,阵面各天线阵元统一进行移相,同时完成多个波束的形成[7]。
2.1.3阵面状态监测及幅相一致性校准
相控阵天线阵面由于各种原因(如安装误差、元器件性能下降或损坏等)而使相控阵中各阵元的激励电流存在随机幅度和相位误差,将严重影响天线波束指向及副瓣性能。因此必须要有相应手段对各天线阵元的幅度和相位进行监测和校准,以便准确判断阵面的工作状态,并及时进行数据校正或更换失效的部件[5]。
本系统中相控阵天线阵面监测采用内监测方法,利用校准网络逐一选通各个收发通道,并注入相同的校准信号,由基带设备获得各通道的幅相误差数据,实现天线的幅相一致性自校准。
2.2软件设计
波控系统FPGA软件主要包括波控指令接收模块、波控计算模块、天线组件控制模块和波控指令反馈模块。波控指令接收模块用于接收波控系统发来的波控指令,波控指令主要包括各波束的角度信息和子阵切换方式;波控计算模块由波控指令计算天线各阵元的波控码和子阵切换信息,并由控制模块的串行接口发至各阵元移相器的数据锁存器中。发送完毕后,波控指令反馈模块向波控系统反馈指令执行结果;波控系统判断各子波控器的执行结果,并发出整阵同步信号,各锁存器输出波控码使整阵移相器同步进行数据更新。波控器收到波控系统发来的角度信息后,先缓存在内部存储器中,然后各子波控器再计算出阵列天线中每个阵元对应的移相器所需的相位值,求出阵列中各个移相器需要的波控码,通过驱动器使移相器移相,从而使天线波束指向预定的搜索空域[9]。gzslib2022040417312.3控制算法
2.3.1指向角计算
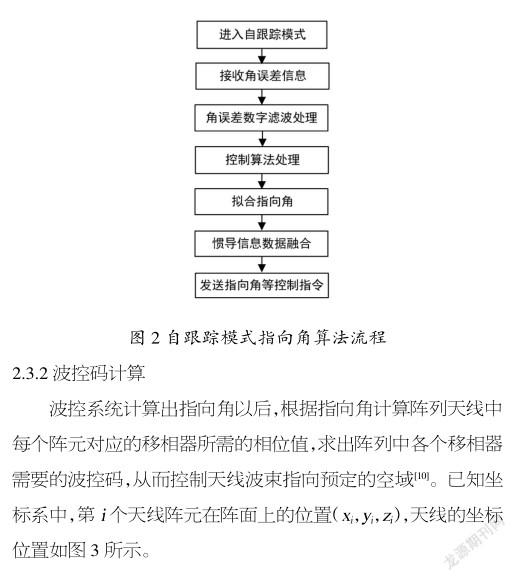
波控系统可以在各种工作模式下计算天线指向角,以自跟踪工作方式为例,接收机送来的数字角误差信息经过数字滤波处理得到天线相对目标指向角,自跟踪模式指向角算法流程如图2所示。

3波控系统设计
3.1波束电子稳定
为了补偿平台运动的影响,需要对波束指向进行动态修正。相控阵天线在波束控制上有先天的优势,宜采用波束电子稳定的方法来补偿平台摇摆。波束电子稳定是根据大地坐标系与天线阵面坐标系之间的关系,波控分系统在计算移相器的移相值前,对天线阵面坐标系下的俯仰角、方位角进行坐标变换及动态补偿,以保证空间指向角的准确性[8]。
3.1.1平台运动信息
波束指向动态修正过程,首先需要测量平台运动的信息,再将波控软件中目标的波束指向转换为相对于阵列天线中各个阵元的波束指向。在设计上,同一组件上不同阵元的阵元方向一致,仅坐标位置不同,目标的波束指向转换为相对于组件的波束指向即可,简化了坐标系转换的运算量。承载相控阵天线平台的运动由惯导器件测量计算,然后惯导器件输出实时的位置和姿态变化信息,主要有GPS位置、航向角、俯仰角和横滚角信息。
在波控软件中,目标位置程序引导参数的波束指向计算需要得知2个关键信息:目标GPS位置与站址GPS,在车载平台长距离运动过程中,为了保证波束指向的准确性,需要获得平台本身实时的GPS位置信息参与波束指向计算,修正是因为平台位置改变引入指向误差。
为了方便计算,在车载平台坐标系中规定车头方向为轴正方向,车头向前车体左侧为轴正方向,车顶方向为轴正方向。此时姿态信息中的航向角是车头方向即轴绕轴沿逆时针偏离正北方向的角度;俯仰角为绕轴偏离原始位置的角度,大拇指沿轴,右手螺旋方向为正,反之为负;横滚角是绕轴偏离原始位置的角度,大拇指沿轴,右手螺旋方向为正,反之为负。车体坐标系中的姿态信息如图4所示。

3.1.2波束指向坐标系转换
波控软件通过计算跟踪目标在大地坐标系下的方位、俯仰角度,然后根据承载平台的实时姿态信息做第1次坐标转换,将大地坐标系下的波束指向通过坐标系旋转转换为平台坐标系下的方位角和俯仰角的波控码。
阵列天线是共形排列,在曲面上不同位置的阵列组件与承载相控阵天线的平台形成不同的角度,同一个波束指向与阵列中不同位置的组件形成的夹角角度不同。波控码下发到各个阵列组件之后,组件内部根据各自相对于承载平台中心位置的坐标信息做第2次坐标转换,将波束指向通过坐标系旋转转换为对应于各个组件的波束指向。

3.1.3波束指向的同步下发
平台上阵列天线的阵元数量较多时,波束指向的下发需要通过设计保证下发速率和同时性的要求,以满足波束形成的指标。在实际使用中,波控计算机输出的波控码往往通过同步串口、异步串口、CAN总线等形式下发到各个阵元,但是直接在波控计算机进行分路会增加波控计算机的接口数量。为了在阵元数量较多时满足同时性要求,可以通过分级的方式将波控计算机的波控码通过同步分路器分成多路分别送往不同的子阵,如果子阵数量较多可以再次进行分路,将波控码再次分路到不同的阵元。
通过同步分路器的方式将波控码分级送到不同阵元,可以减少简化波控计算机的接口数量,减少波控计算机设计难度,减少线缆总长度,便于后期灵活拓展与设备维护。同时,在同步分路器端进行同步分路输出可以减少同一时刻输出的波控码到达不同阵元的时间差。但是通过同步分路器进行分路也有增加波控码传输时延的缺点,同步分路器的时延主要受制于电缆线信号屏蔽性能、接口物理速度和分路器系统时钟,使用串口、CAN等线路实际应用时更适合跟踪角速度较低的目标。未来如果有更高的时延要求可以通过更换物理接口的方式改进,如将电缆传输改为光纤传输,可以增加传输带宽,减少时延,提高波束指向下发速率,提高波束扫描速度。
3.2最小波束跃度
4结束语
本文设计的波控系统采用的是分布式控制方式。分布式控制是现代大型相控阵系统进行波束控制的有效方法,具有波控码的运算速度快的特点,分布式波控系统中,每个子波控器控制阵面中的一部分阵元,子波控器分别接收波控系统送来的波束指向角信息,完成波控码的计算,最后送往激励器推动移相器工作,实现波束在空间的扫描。另外,为了提高相控阵天线的性能,需要减小波束跃度,传统技术中,增加移相器可以减小波束跃度,但增加移相器不仅会带来移相器损耗增加和波控设备增加,而且要使移相器保证较高的移相精度,不但成本高、实现难度也很大。采用虚位技术通过舍弃相位值部分位数,能够实现节省移相器位数,减小波束跃度的目的,可以作为今后研究的方向。
参考文献
[1]薛王伟,张剑云.相控阵天线关键技術发展趋势[J].现代防御技术,2007(1):96-100.
[2]曹德明.相控阵天线波束控制的基本原理及波控系统的任务[J].电子技术与软件工程,2018(5):91.
[3] MERRILL I S.雷达手册[M].北京:电子工业出版社,2003.
[4]郑清.相控阵雷达波控系统技术研究[J].现代雷达,2006(4): 53-55.
[5]张中伟.相控阵天线关键技术的研究[D].杭州:杭州电子科技大学,2012.
[6]林昌禄.天线工程手册[M].北京:电子工业出版社,2002.
[7]张明友.雷达系统[M].北京:电子工业出版社,2018.
[8]唐文杰.一种相控阵天线的研究与设计[D].西安:西安电子科技大学,2017.
