面向无人机中继通信平台的混合网络编码算法
2022-04-02丛嘉艺李彬郭宪振张若南
丛嘉艺,李彬,郭宪振,张若南
(西北工业大学电子信息学院,710072,西安)
随着无人机(UAV)技术的发展,成本降低和结构小型化,无人机在民用和商业领域出现了许多新应用,例如气象监测、林木监测、交通控制、货物运输、紧急搜救、通信中继等[1]。无人机通信平台作为可移动的空中通信基站受到了广泛关注[2]。与传统地面无线通信基站相比,无人机无线通信基站具有可优化的飞行轨迹、为地面用户提供视距信道(LoS)连接、灵活部署等优点[1-3]。无人机通信平台已成为空-天-地-海一体化通信的重要组成部分[4]。
近年来,国内外专家学者针对无人机通信技术问题进行了诸多研究。例如无人机被用来对物联网设备(IoT)进行信息收集和发布[5-8]或作为空中无线中继节点[9-14]为用户提供无线通信支持。可以在复杂地形条件下有效地提高远距离系统吞吐率,扩大通信范围的无人机中继通信技术受到了广泛的关注。
按照信息流的流向分类,无人机中继技术可以分为单向中继[8]和双向中继[10]两类。在单向中继网络中,信息流从源站到目的站是单向的,中继节点只需要将从源站接收到的信息转发到目的站即可[11]。在双向中继系统中,无人机中继节点用于辅助两个不能直接通信的用户进行信息交换,无人机接收并转发来自两个用户的信息[12]。无人机中继通信技术虽然已得到广泛的研究,但是仍存在一些有待讨论的问题。首先,现有的研究主要集中在单向中继系统上[15-16],而对无人机双向中继系统还缺乏相应的研究。其次,虽然在传统固定位置的地面中继系统中,编码方案的性能得到了充分的分析与研究[17-18],但是在无人机支持的移动双向中继网络中,其性能还未得到分析与优化。无人机位置随时间改变,无人机中继节点与用户间通信方式也应随之变化。此外,单纯的数据中继已不能满足用户信息保密的需求,需要引入可以提高用户安全性的编码策略。
提高系统保密性的一个有效方式是采用网络编码策略[19]。传统的地面中继方案已经证明了其可以充分利用时隙资源,提高系统吞吐率,并通过编码方式提升通信安全性[20-21]。目前已有许多学者将无人机平台与网络编码相结合以提升无人机通信系统容量和安全性[21-23],但是对于无人机移动平台,在双向中继模式下,其与两个用户间距离的变化会显著影响与用户的通信速率[24-25]。对于无人机移动中继平台,在设计中继通信算法时不仅要考虑网络编码方式,还需要考虑无人机飞行方式导致的吞吐率的变化。除此之外,无人机飞行速度会导致通信周期的改变,如果要在工程中应用,算法需要具有较强稳定性。
综合考虑上述的无人机中继节点所存在的问题,本文提出一种面向无人机平台的混合网络编码双向中继调度算法,通过判决无人机与用户间信噪比来进行中继方式转换,并选择最优用户进行中继通信。实验结果表明,相较于固定位置中继算法,网络编码可以有效提升无人机中继系统吞吐率,其中混合中继编码相比固定时隙编码中继策略提升效果更好,且具有更高的稳定性。
1 无人机中继平台通信模型
1.1 无人机飞行模型
无人机中继通信平台工作模型如图1所示。无人机在固定飞行高度H的条件下在用户1和用户2之间进行循环往复飞行,为2个用户提供中继通信服务。
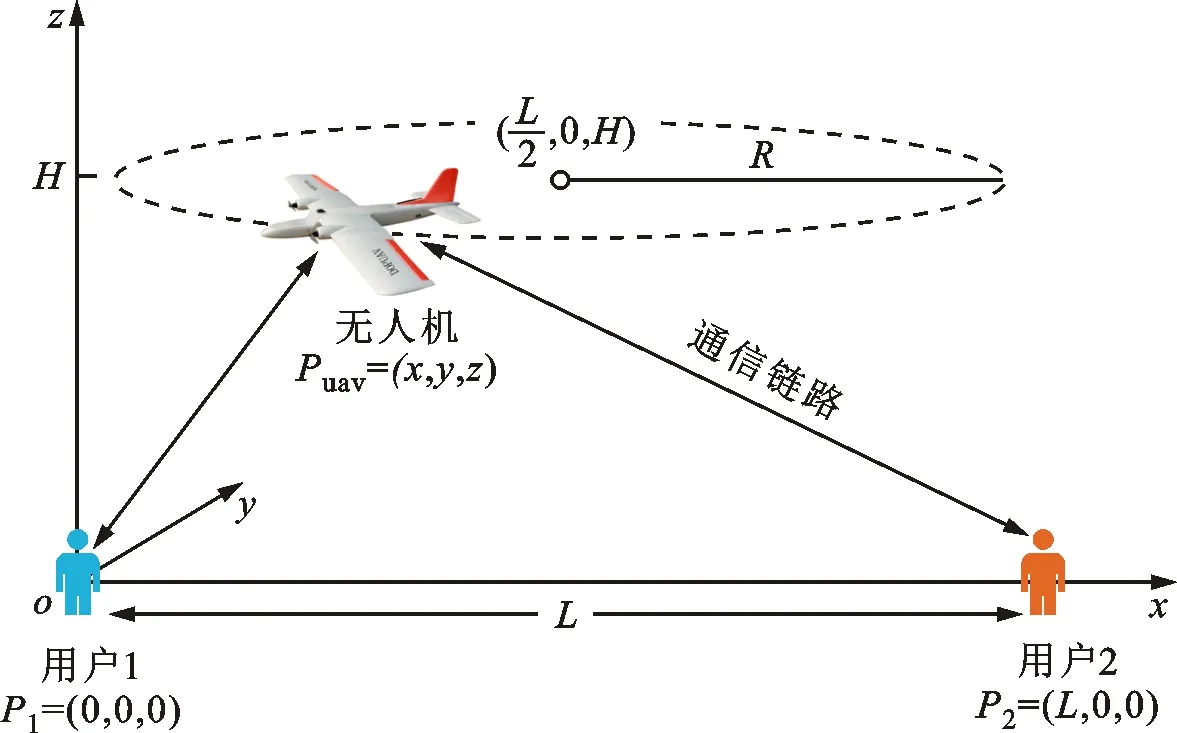
图1 无人机中继通信平台工作模型Fig.1 Work model of UAV relay communication platform
为确定无人机和地面用户的三维位置,以用户1为坐标原点建立笛卡尔坐标系。相距L的2个用户的位置坐标可以表示为P1=(0,0,0)和P2=(L,0,0),无人机中继节点的位置坐标可以表示为Puav=(x,y,z)。不失一般性,为保证无人机中继通信平台在1个周期内可以为2个用户提供性能一致的通信服务,无人机的飞行轨迹被设定为1个以(L/2,0,H)为几何中心的循环往复飞行模式。无人机循环往复飞行模式的转向位移远小于巡航位移,因此转向时间可以被忽略。
设无人机飞行半径为R,无人机的初始位置为(L/2+R,0,H),以速度v在用户2和用户1之间进行循环往复飞行,则无人机在1个飞行周期内实时位置的x轴坐标可表示为
(1)
无人机位置在yoz平面上的投影可表示为
(2)
1.2 无人机通信模型
由于无人机工作在较高的飞行高度,其与地面用户之间的信道链路可以近似为视距信道。无人机中继平台与2个用户之间的信道增益hu,1和hu,2可以表示为
hu,1=β0(‖Puav-P1‖)-2
(3)
hu,2=β0(‖Puav-P2‖)-2
(4)
式中:β0是参考距离为1 m处的信号接收功率,其大小由天线增益和载波频率决定。
在视距信道条件下,无人机与用户1之间的信噪比ESNR,1,无人机与用户1、用户2之间的瞬时数据传输速率Cu,1、Cu,2可以表示为
(5)
(6)
(7)
式中:Pt为无人机中继平台通信发射端功率;B为带宽,不失一般性,本文认为无人机与用户1、用户2之间的通信带宽均为B;σ2为噪声功率密度。显然,Cu,1、Cu,2是随无人机实时位置变化而变化的函数,因此合理地设置无人机飞行轨迹可以有效地优化无人机平台对地面用户的数据传输速率。
由于无人机往复飞行的飞行轨迹为对称轨迹,1个飞行周期内用户1和用户2的吞吐率相等,因此在进行吞吐率分析时只需分析用户1的数据吞吐率即可。用户1的误码率Ru,1经过高斯误差函数运算,可以表示为
(8)
2 网络编码
2.1 无人机网络编码
在无人机无线中继系统中引入网络编码概念,旨在减少通信时隙、提高通信系统吞吐率、增强中继系统信息保密性。
无人机单向中继方式如图2(a)所示,无人机平台在第1时隙接收来自用户2的数据m2,在第2时隙飞行至用户1附近后卸载数据。第3、第4时隙的数据上传与卸载方式与第1、第2时隙相同但是接收与发送目标用户相反。无人机双向中继方式如图2(b)所示,无人机在第1、第2时隙分别接收来自2个用户的数据,并在第3、第4时隙将数据分别下发给对应的接收用户。无人机网络编码中继通信方式如图2(c)所示,无人机中继平台在第1、第2时隙分别接收来自用户1和用户2的数据,并对数据进行编码(例如m1⊕m2),将2组数据合并为1组数据,并在第3时隙将数据在通信空间内进行广播。2个用户接收数据并进行解码,从而获取所需数据。使用网络编码可以有效地减少完成1次通信所需要的时隙数,从而提高系统吞吐率。

(a)单向中继方式
为简化叙述,本文采用异或网络编码。由于传输速率不一致,各时隙转发或接收的数据包数不相同,本文采用文献[14]提出的滑动窗口编码机制来减少无人机中继平台内存压力。无人机在飞行过程中,由于无人机与用户1和用户2之间距离不相等,接收到的数据包数也不相同,因此无人机中继平台缓存的来自2个用户的数据包长度也不相同。如果无人机与某一用户进行双时隙通信,则滑动窗口将始终保持可以发送的最大数据包数以提升系统吞吐率;如果无人机与2个用户进行三时隙移动编码通信,由于无人机与2个用户信道容量的差异,在无人机接收数据包时隙缓存的用户数据包数通常不相等。此时在第3时隙广播过程中,无人机选择两种数据包的最小值,并以该数据包大小作为移动窗口大小在广播时隙中进行滑动选取应发送的数据包,再经编码后进行数据广播。由于飞行轨迹的对称性,用户1与用户2的数据包大小关系周期性变化,因此这种滑动编码方式可以在1个飞行周期内完成全部数据包的下发,完成中继通信任务。
这种采用网络编码的中继无人机通信平台可以将飞行周期T划分为n个时隙τ,即n=T/τ,则各时隙所对应的信道容量可以表示为
(9)
(10)
(11)
式中:P1、P2分别表示用户1和用户2的通信输出功率;C1、C2和C3为3个时隙对应信道的信道容量。
为在广播时隙实现系统吞吐率的最大化,混合中继编码算法需要综合考虑无人机已缓存的数据包情况和无人机中继平台所允许发送的数据包大小。不妨假设第3时隙无人机中继平台进行网络编码后的数据包大小为Ku。第3时隙的数据包大小并不固定,其大小取决于无人机中继平台缓存的来自用户1和用户2的数据包S1、S2。对于无人机中继通信平台,显然S1、S2不会大于无人机允许的最大发送数据包Ku,max,否则无人机在前2个时隙无法完整接受2个用户的数据。在本文提出的混合中继策略中,存在无人机与某一个用户的单向通信过程。由于在前两时隙通信中无人机接收的来自单一用户的数据包不相等,S1、S2的大小周期性变化,从而导致Ku的变化。Ku可以表示为Ku=min{S1,S2}。这种无人机网络编码中继方式(UNCWR),将作为混合网络编码调度算法中的三时隙通信策略进行使用。
2.2 混合编码调度算法
无人机作为移动的中继节点,其与地面用户间的通信速率会随无人机位置变化而发生改变。式(5)表明当距离某个用户较远时,接收信息的用户可能由于信噪比太低而无法正常接收和解调数据。这种情况会导致系统总吞吐率的下降,浪费通信时隙。为解决这一问题,本文提出了一种单向中继方式和网络编码混合中继调度算法。这两种中继方式工作流程如图2(a)、2(c)所示。混合编码调度算法采用信噪比作为中继转换方式的判别条件。
由于无人机飞行轨迹的对称性,两用户中继通信系统存在4个转换时刻。为分析转换时刻的合理性,循环往复飞行轨迹被等分为4个阶段。因此无人机总飞行轨迹被分为8个飞行阶段,无人机混合编码模式转换如图3所示。在这种对称的飞行轨迹下,对用户1进行分析时,吞吐率可以简化为阶段2、阶段3和阶段4的分析。
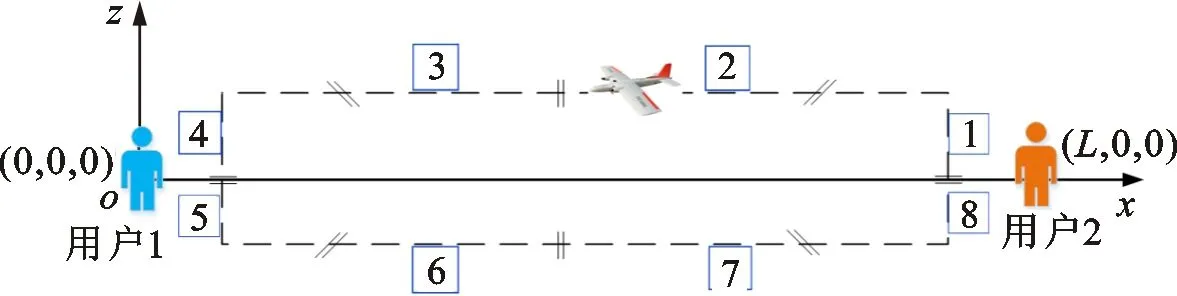
图3 无人机混合编码模式转换示意图Fig.3 A conversion diagram of HUNCWR mode
在图3所示的无人机飞行轨迹中,阶段1无人机中继平台更接近用户2,因此与用户2之间进行两时隙直传,即对用户2卸载来自用户1的无编码数据,并接收来自用户2上传的数据。阶段2无人机距离用户1和用户2信噪比相差不大,此时无人机将采用网络编码的方式减少通信时隙,提升吞吐率。其他飞行阶段的分析与阶段1和阶段2分析类似,不再赘述。这种混合中继方式的问题的关键在于确定其中继转换点的时刻和位置。同样地,在混合中继编码调度策略下,用户1能进行有效数据传输的阶段为阶段2至阶段7。考虑飞行轨迹的对称性,用户1在1个飞行周期内的平均吞吐率为
(12)
式中:Pa2、Pa3、Pa4分别表示用户1在阶段2、阶段3和阶段4接收到的数据包数;Ktotal为一周期总接收包数。

(13)
(14)

(15)
(16)
(17)
(18)
式中:K=4P0/[(2vt-L-2R)2+H2]。由于在数量级比较上P0远大于L、H、v,上式的后两项均可以近似为0,积分项可以进一步近似为
ln{1+4P0/{[2v(3iτ+t0)-L-2R]2+H2}}
(19)
其他两项同理类推,式(15)~(17)可以化简为
(20)
Pa3=
(21)
Pa4=
(22)
通过分析和简化,本文给出了无人机混合网络编码调度算法(HUNCWR)系统吞吐率计算方式。这种计算方式与网络编码方法一致,便于仿真实验结果的分析。无人机混合中继编码系统算法描述如下。
算法1无人机混合中继编码算法
输入 节点距离L、无人机轨迹半径R、飞行速度v、时隙间隔τ、信噪比门限Eth


2.fori=1 ton
3.ifnτ<2R/v-t0ornτ>2R/v+t0
4.计算K2,u,发送并被无人机存储,无人机向用户2发送Ku,2。无人机与用户2双时隙中继
6.计算K1,u,发送并被无人机存储,无人机向用户1发送Ku,1。无人机与用户1双时隙中继
7.else
8.fori=1 ton
9.if rem(i,3)==1
10.计算K1,u,发送并被无人机存储
11.else if rem(i,3)==2
12.计算K2,u,发送并被无人机存储
13.else
14.计算Ku,1=min{Ku,max,S1,S2}并在网络编码完成后进行数据广播。
15.end if
16. end for
17.end if
18.end for
3 实验仿真与分析
本实验是在Matlab2020a环境架构下进行的,无人机三时隙网络编码算法和无人机混合编码调度算法仿真参数见表1。
表1 HUNCWR算法场景参数设置Table 1 Parameter setting of HUNCWR Scenario
本节对比分析了两种无人机中继通信算法与传统的固定位置四时隙中继、固定位置网络编码中继的性能。对于两种固定位置的中继方法,无人机中继节点始终位于(L/2,0,H)处。由于两个用户的位置和无人机轨迹具有中心对称性,因此任意一个用户的吞吐率均可代表系统吞吐率。本文在仿真实验中选取用户1进行分析。
在飞行半径R=600 m、飞行速度v=10 m/s的条件下,4种中继方式下用户1吞吐率随用户间距离的变化如图4所示。混合中继网络编码算法可在2个用户间进行数据包的搬移,并根据信道信噪比的大小差异进行通信方式的选择,从而在用户间距离L较大时有效增加用户吞吐率。在用户间距离L较小时,无人机与两个用户间信噪比均高于设定的信噪比门限Eth,在各位置均进行三时隙通信,而混合中继策略需要进行移动飞行,浪费部分有效通信时间,此时固定位置通信效果好于本文提出的混合中继方式。此外,混合网络编码中继调度算法下的吞吐率随用户间距离变化最为缓慢,证明本算法具有更强的稳定性。

图4 不同中继方式下用户吞吐率随用户间距离变化Fig.4 Relationships between user throughput and L under different relay modes
图5为用户1吞吐率随无人机飞行半径的变化。固定位置中继通信方式不存在飞行轨迹,无人机飞行半径R对固定位置中继通信方式无影响。当飞行半径较小时,飞行轨迹与固定位置通信基本相同,吞吐率接近;随着半径增加至最佳半径,本文提出的混合中继算法相较于三时隙固定位置中继通信可以提升吞吐率52.7%。相较于固定位置的网络编码算法的用户吞吐率,三时隙移动网络编码算法只能提升28.42%。当R进一步增加至超过用户间距离L后,无人机移动中继系统吞吐率会随之下降。混合中继编码所引入的两时隙直传阶段可以有效地减少由于飞行半径增大导致的吞吐率下降。

图5 不同中继方式下用户吞吐率随飞行半径的变化Fig.5 Relationships between user throughput and R under different relay modes
图6给出了移动网络编码算法与混合中继编码算法的吞吐率随飞行半径和用户间距离的变化。在传统移动中继通信方式中,各时隙选择的通信用户是固定的,使得通信系统在部分时隙选择信道条件较差的用户,降低整个周期内的吞吐率。在相同飞行半径和用户距离下,混合中继方式的吞吐率均高于网络编码方式,在用户间距离L为700 m时,混合中继编码算法可以提升吞吐率18.34%;在用户间距离L为900 m时,混合中继编码算法可以提升吞吐率23.92%。
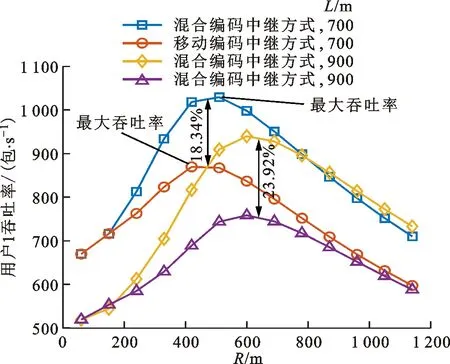
图6 吞吐率随飞行半径和用户间距离变化的对比Fig.6 A comparison of throughputs with different R and L
图7为在飞行半径R=300 m、用户间距离L=800 m的条件下,不同飞行速度下吞吐率随飞行半径的变化。更大的飞行速度使得飞行周期T变短,可用时隙n减少,导致1个飞行周期内系统吞吐率下降。混合中继编码算法在每一时隙均进行信道条件判定,而非固定时隙用户方式,环境适应性更强,因此在相同的速度变化条件下,平均吞吐率下降更小。对于无人机中继混合编码方式,其吞吐率受飞行速度v的影响在1个周期内平均变化率为0.65%,显著低于移动网络编码模式的变化率3.65%。表明混合中继编码方式比移动网络编码调度算法稳定性更强。
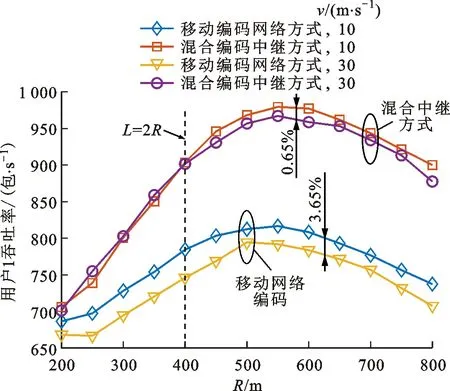
图7 不同飞行速度下吞吐率随飞行半径的变化Fig.7 A comparison of throughputs with R at different v
Eth的大小直接影响着网络编码方式飞行距离在一个飞行周期总距离的占比。Eth对混合编码调度算法和用户吞吐率的影响如图8所示。如图8(a)所示,网络编码模式的占比随Eth增加而增加,这与式(13)(14)的表述一致。在图8(b)中,Eth较小使得R/v>t0,即不存在三时隙网络编码阶段,此时系统吞吐率较低。随着Eth的增加,引入更多的三时隙网络编码方式可以有效地通过切换通信方式增大用户吞吐率。当Eth进一步增加时,通信系统中三时隙编码增加,浪费与用户间距离较近位置处的两时隙通信机会,导致系统吞吐率的下降。

(a)HUNCWR算法的飞行距离占比随Eth的变化
通过以上实验结果的对比分析,证明了混合网络编码策略在用户间距离较大与飞行半径较大的条件下,相较无人机固定位置中继通信模式和移动网络编码算法具有更好的稳定性,并可获得更大的用户吞吐率。
4 结 论
本文提出了一种面向无人机中继通信平台的混合网络编码调度算法以提高中继系统吞吐率,并进行仿真实验测试。主要创新点包括无人机网络编码算法、混合网络编码切换方式、与无人机双向中继系统吞吐率计算方式。首先对无人机中继平台的工作方式进行了分析,给出了无人机平台基本飞行模型。在此基础上介绍了中继通信的几种常见方式并进行了定性分析,给出了一种面向无人机中继通信平台的网络编码方式。通过对这种网络编码方式和无人机的工作特点的综合考虑,最终提出了一种无人机混合编码中继通信调度算法。仿真实验结果表明:相较于固定位置的网络编码算法,本文提出的混合网络编码调度算法可以提升系统吞吐率52.7%;在不同的飞行速度下,移动网络编码算法用户吞吐率平均变化率为3.65%,混合网络编码调度算法吞吐率平均变化率为0.65%,证明了混合中继编码算法可以显著地提高通信系统指标,增大用户吞吐率,增强系统的稳定性。
