基于倾斜摄影测量技术的实景三维建模及精度分析
2022-04-02赵建春
赵建春
(潍坊市勘察测绘研究院,山东 潍坊 261041)
随着民用无人机技术的成熟,使用无人机搭载高清摄像机进行航测在各行业得到了推广使用。从拍摄方式上来看,倾斜摄影可支持多镜头、多角度拍摄,相比于竖向拍摄能更加详细地描述和恢复地物细节,因此基于倾斜摄影获得的影像数据制作的实景三维模型精度更高。在实际作业时,技术人员既要熟悉基于倾斜摄影测量技术制作实景三维模型的流程,如稀疏匹配、空三测量、纹理映射等;同时还必须了解可能影响模型精度的各种因素,并采取相应的措施来提高模型精度。例如根据测区地形地貌科学布设控制点,或者根据无人机和相机性能灵活调节航高等。通过提高实景三维模型的精度,为城市规划等工作的开展提供必要的支持。
1 倾斜摄影测量实景三维模型的构建流程
1.1 稀疏匹配
选择特定的算法,在描述相同地形地物的不同影像之间提取同名特征点,这一过程即为稀疏匹配。根据提取出来的同名特征点,可以在数字地图上更加准确地表示不同影像之间的相对位置关系,甚至能起到自动修正位置、提高位置精度的效果。完成稀疏匹配要经过以下流程:a.特征点提取。为了从影像中找到特征点,可选择Harris 算子进行角点检测,找出特征角点,或者选择DoG 算子进行斑点检测,找出特征斑点。这样就能从多个同名点中找出同名特征点。b.特征点描述。利用特征点本身或领域点的特征信息来描述特征点,例如尺度信息、坐标信息、方向信息等。c.特征点匹配。在多个特征点之间建立映射关系,从特征点集合中寻找能成功配对的信息。根据配对结果,如果相似度较高,说明两点为同名特征点的几率越大。
1.2 空三测量
在稀疏匹配的基础上,可以参考影像中所有同名特征点的配对结果进行相对定向。使像点、地物点、投影中心三点一线,保证同一地物点上的不同影像,产生的像点均满足共线条件;而2 条以上的同名光线,与摄影基线之间应满足共面条件。在此基础上,利用共面方程可以计算出无人机相机拍摄影像时的坐标位置和拍摄角度。基于这两项数据,反推出影像在像空间辅助坐标系下相对的外方位元素,从而实现相对定向。定向完成后,继续选择当前数字地图上的特征点,将其作为控制点,根据每一个控制点的坐标,在对应的地面摄影测量坐标系上标记出来。在所有控制点标记完成后,采用光束法区域网平差计算方法,可以得出外方位元素的最佳解,完成空中三角测量。
1.3 密集匹配
将所有特征点纳入到同一个集合中,即可得到稀疏点云。虽然稀疏点云可以提供构建实景三维模型的数据,但是模型清晰度、纹理等方面还存在很多缺陷,因此还要对稀疏点云中的同名像点做密集匹配处理。尤其是采用倾斜摄影方式获得的数据,因为拍摄角度的原因,影像资料的投影变形大、地物之间相互遮挡的情况较为常见,需要对影像中的特征点做特殊处理。方法如下:利用特征点建立三角网,每个独立的三角形代表一个独立区域,并对同名三角形进行独立的仿射变换。这样每个同名三角形中,每个顶点都可以提取出1 个同名特征顶点,将三角网中所有三角形按照上述方法完成仿射变换后,可以得到一个由同名特征顶点组成的旋转矩阵。利用该矩阵对三角形内的点进行像素点匹配,如果匹配相似度达到标准值,则为同名像点,利用该方法可以寻找更多数量的同名像点,从而提高实景三维建模的精度。
1.4 网格化处理
为了使构建的实景三维模型符合人眼的视觉习惯,还需要在影像数据密集匹配的基础上,对密集点云做三角网格化处理。其步骤包括:a.在已经完成的三角网上进行网格初始化,使相邻三角形的边界清晰,得到若干个元三角形;b.基于最优点位于网格生长方向的约束条件,使用Delaunay 算法对元三角形做网格化处理,进行网格生长,可以获得真三维网格;c.对真三维网格进行检查,如果发现存在空洞,则使用Delaunay 算法予以修补,所有空洞修补完毕后可以得到最终的网格模型。
1.5 纹理映射
网格模型基本上能够呈现出测区地物的真实景象,但是在一些细部纹理上还有一定的改进空间。尤其是在阴影部分,可能会存在边界模糊、内容覆盖的情况,因此还需要对网格模型做纹理映射处理,使实景三维模型的真实感更强。纹理映射的步骤包括:a.基于影像坐标系和纹理坐标系之间的对应关系,从纹理坐标系中,找出与影像点对应的纹理坐标;b.借助于共线方程,将上一步骤中所得的纹理坐标,与三维模型建立对应关系,从而实现二维影像向三维模型的转换;c.将纹理信息添加到三维模型的表面,让三维模型具备更加真实的视觉效果。
2 倾斜摄影测量实景三维模型的精度分析
2.1 实验设计
选择某职工宿舍楼作为测区,占地面积3440 平方米,测区内地势平坦,有5 栋6 层楼房,高度为17.2m。使用无人机搭载高清摄像机进行测区内外业影像的数据采集。实验中所用无人机为广东翱胜创新科技公司生产的F16 型油动无人机,满载总量可达44kg,最长续航时间45min,数据稳定传输距离5kg,配备Sony ILCE-5100 型数码相机。内置5 个镜头,其中1 个为焦距20mm 的竖直镜头,另外4 个为焦距35mm的倾斜镜头。相幅6400×4800,单个像素3.8μm。根据测区地形、建筑物高度以及无人机和相机性能参数,对无人机航测线路进行规划,确定航行高度120m,照片数量156 张,航线重叠与旁向重叠统一设置为80%,影像地面分辨率为3mm,现场共设置了12 个像控点,比例尺设置为1:1200。
2.2 实验结果
考虑到测区内建筑数量较多,并且楼间距偏小,因此在实际测量时分别采取了无人机竖直摄影测量和倾斜摄影测量2 种方式,对测量精度进行对比。在完成航测之后,将两次测量所测数据进行处理、转化后,得到测区的实景三维模型。选择该模型中的地面检查点和房角检查点,对比坐标,进行进度分析。两次航测的参数设置如表1 所示。
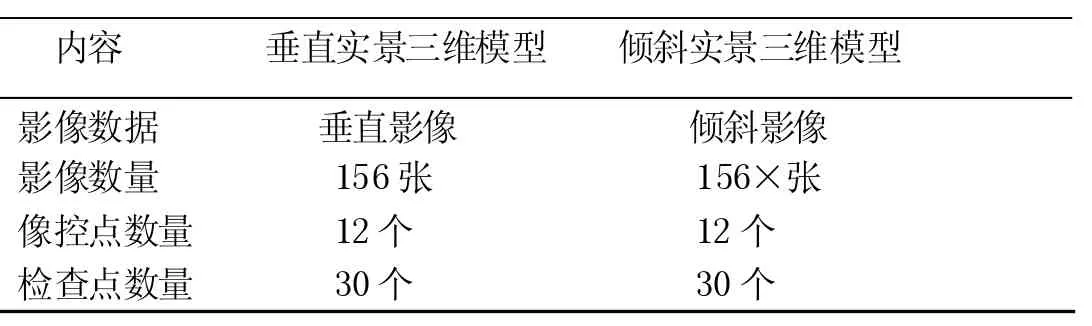
表1 两次航测数据对比表
在两组实景三维模型中,从整体上来看差距并不明显。但是观察模型细节可以发现,采用竖直单镜头摄影并生成的实景三维模型,存在纹理不准确、阴影内容不清晰等缺陷。特别是模型侧面,竖直模型细节三角网的密度小,展示的信息不够丰富,如图1 所示。
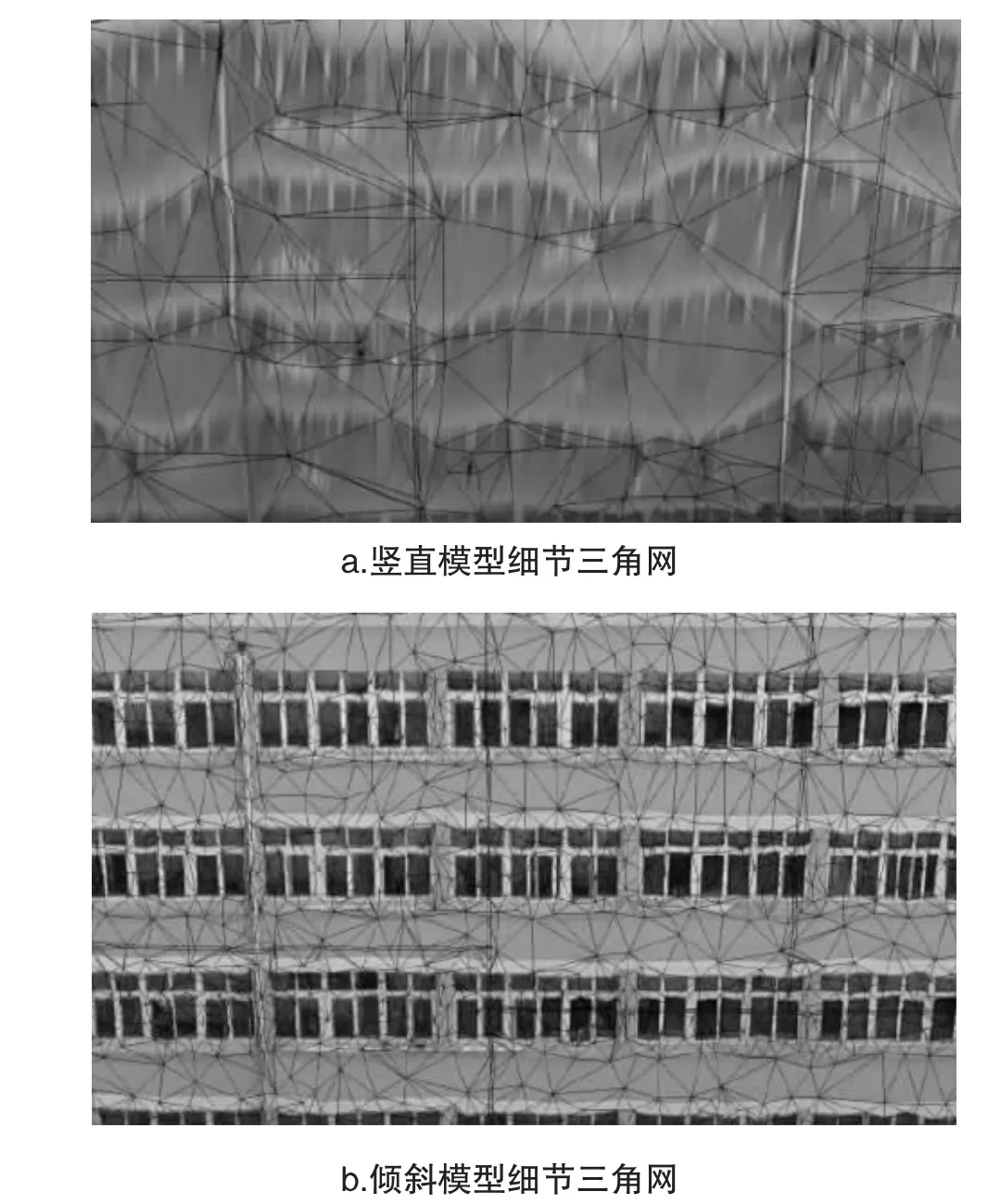
图1 测区建筑侧面实景三维模型对比
根据模型对比情况可知,采用无人机倾斜多镜头摄影方式,能够保证所得数据更加丰富,实景三维模型呈现出的地物画面更加清晰,三维模型的真实性更好,从而提高了三维模型的利用价值。
3 航高对倾斜摄影测量实景三维模型精度的影响
3.1 影像地面分辨率
使用无人机搭载高清摄像机,可以根据既定路线自动采集地面影响,具有操作灵活、效率较高等特点。在影像数据采集过程中,无人机的飞行高度会对倾斜影像数据的精确度产生直接影响。因此,为了保证航测数据及三维模型的精度,必须要通过实验确定最佳航高。影像地面分辨率(GSD)是影像中一个像素所表达的地表实际距离,由无人机的航高和相机的参数共同决定。其中,相机的焦距、GSD 等参数都是固定的,因此在航测时只能通过调节无人机的飞行高度来达到最理想的影像分辨率。航高、焦距与GSD 之间的集合关系如图2 所示。
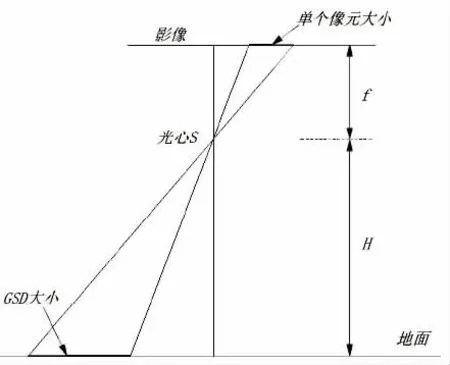
图2 影像地面分辨率的几何示意图
其中,航高(H)与GSD 之间的关系式为:

上式中,f 表示相机焦距,pix 表示影像单个像元的大小。
3.2 实验参数设计
选择某村庄作为测区,用电动多旋翼无人机进行航测。无人机搭载NOKIA 808 型号倾斜相机。内有1 个焦距为8mm的竖直镜头,以及4 个焦距为10mm 的倾斜镜头,相幅4200×3600,单个像素2.6μm。本次实验中无人机航拍高度分别设定为45m 和32m,前者对应的影响地面分辨率为1.5cm,后者为1cm。无人机的航线重叠、旁向重叠等均统一设置成80%。在测区内共布置了12 个像控点,成图比例尺为1:800。按照上述设定参数,利用无人机航测测区数据后,使用软件生成测区的实景三维模型。
3.3 模型精度对比与分析
考虑到测区内房屋较为密集,故选择房角作为检查点,共计24 个。分别从生成的2 个实景三维模型上,对房屋进行数字线画图采集,并将结果与全站仪实测的房角点平面坐标对比,根据对比结果可以得出不同航高对数字线划图房屋精度的影响。其中,24 个检查点的平面误差如图3 所示。

图3 24 个检查点航高对比实验房角检查点平面误差直方图
结合图3 数据,求得24 个检查点的中误差,不同地面分辨率的中误差如图4 所示。
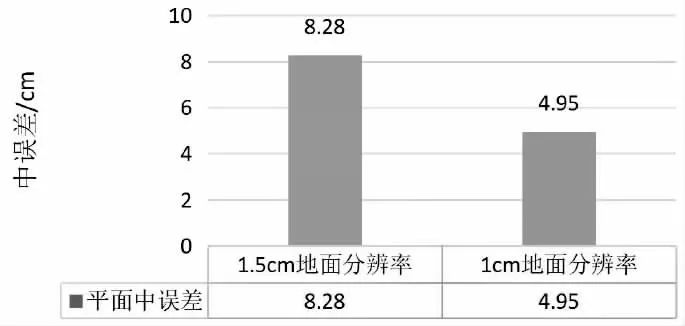
图4 航高对比实验房角检查点的中误差直方图
经数据统计,在1cm 地面分辨率的倾斜实景三维模型中,平面平均误差(中误差)为4.95cm,其中最大误差8.21cm,最小误差为0.93cm。在1.5cm 地面分辨率的倾斜实景三维模型中,平面平均误差为8.28cm,其中最大误差为16.75cm,最小误差为0.77cm。如表2 所示。
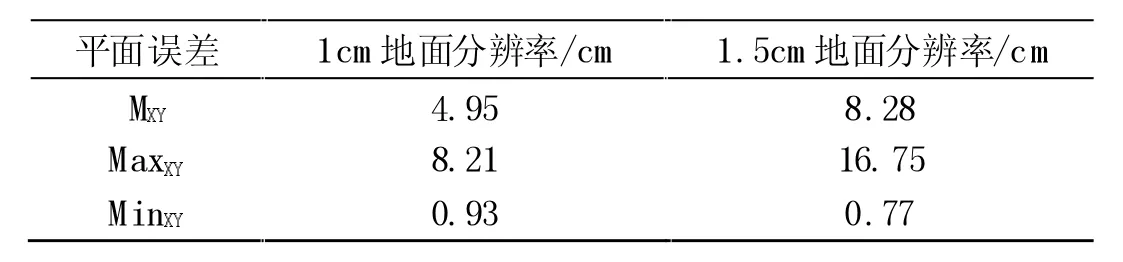
表2 航高对比实验房角检查点精度表
3.4 实验结论
结合实验数据可知,使用无人机倾斜相机采集地面数据、构建实景三维模型时,将影像地面分辨率从1.5cm 提升至1cm 后,房角检查点平面精度提升了60%,表明适当降低航高可以让实景三维模型的精度进一步提升。但是在实际作业时,也必须认识到随着分辨率的升高,获取的影像数据增多,相应的数据处理工作量也变大。因此,要综合考虑内外业因素,以及无人机及其搭载相机的性能,来确定最佳的航高,以保证测绘精度满足使用需求。
结束语
使用无人机航拍采集地物数据时,采用倾斜、多镜头拍摄可以获得更加丰富、精确的信息,在此基础上转化生成的实景三维模型,可以更加清晰、准确地展示测区的地面情况,从而提高了模型的参考价值。在无人机航摄时,除了相机的倾斜角度和性能参数会影响三维模型精度外,无人机的飞行高度也会对影像地面分辨率产生直接影响。在实际作业时,可适当降低无人机航高,提高地面分辨率和实景三维建模的精度,进而为城乡规划、环境保护、地籍测绘等工作的开展提供必要的技术支持。
