无人机倾斜摄影技术下农村房屋不动产确权
2022-04-02张跃飞
米 川 张跃飞
(河南省地矿局测绘地理信息院, 河南 郑州 450006)
0 引言
为保障农民的合法权益、促进农村社会秩序的和谐与稳定,国家在全国范围内组织和加快了宅基地和集体建设用地使用权的确认、登记和发放工作。作为宅基地确权登记的基础工作,农村宅基地调查具有房屋密集、地域分散、分布广泛、用地单一、测量范围小、基础数据缺乏等特点。目前,应用全站仪和全球卫星导航系统-实时动态载波相位差分技术(global navigation satellite system-real time kinematic, GNSS-RTK)完成单点测量较多,其具有测量精度高的特点,但要耗费大量人力、物力,且成本高、周期长。因此,在满足精度要求的前提下探索新的技术手段尤为重要,实现高效、低成本的数据采集与处理。
无人机倾斜摄影技术为新兴的三维数据获取方法,将人机交互技术和倾斜摄影技术有效地结合起来。倾斜摄影是利用同一飞行平台上的多个传感器,从垂直、倾斜等不同角度采集地物的完整信息。以图片采集数据为基础,建立三维模型[1-2]。在传统正交图采集的基础上,该方法进一步生成具有三维坐标的真实地形模型,打破了传统航测只能从垂直角度拍摄的限制。该技术能同时采集楼顶和楼顶高度数据,具有生产周期短、效率高、精度高、成本低等优点。
基于上述分析,将无人机倾斜摄影技术应用于农村住房的房地产确认中。实验结果表明,此次研究的基于无人机倾斜摄影技术的农村房屋不动产确权方法解决了传统方法存在的不足,提高了确权效率以及精度。
1 农村房屋不动产确权框架
本文主要利用无人驾驶飞机倾斜摄影技术进行空间三维重建。通过布置图像控制点,规划路径,获得无人机飞行的多视角图像。再经过数据处理,得到空间的三维模型,生成真实的无线电图像。最终,无线电图像被装载到开思(CASS)软件中,用三维模型实现了数字线划地图数字线划地图(digital line graphic,DLG)的采集。框架如图1所示。

图1 技术实现步骤注:真正射影像(true digital orthophoto map, TDOM);数字线划地图(digital line graphic,DLG);数字地表模型(digital surface model,DSM)。
在执行任务之前,应直观了解整个测区的环境状况,包括测区范围的确定,交通状况,常年气候条件,地形高程,建筑物高度和密度,高压线塔等信号影响到信源的分布,根据测区实际情况制定任务计划,根据无人机设备配置将任务划分为若干组,选择合适的起降点。飞行时间应尽可能控制在09:00:00—16:00:00之间,同时,图像控制点的数目及分布取决于飞行计划、飞行高度和现场情况,从最终的空中三要素点云角度,每10 000~20 000个像素点布置一个控制点,出于安全考虑,本次点间距为150~200 m,并且,在实际测量中,需要根据每个任务的实际地形地面条件灵活使用,以下为具体的规划内容。
2 航线规划
在满足高效率的同时,还要获得足够的图像数据,必须实现合理的路径规划。利用无人机航路规划软件中的地图数据绘制航程图[3-5],输入航路规划参数获取航路数据。针对农村房屋的分散特点规划航线,航线规划主要采用如图2的规划方式。主要根据分区,按照不规则多边形完成航线规划,具体操作如下:
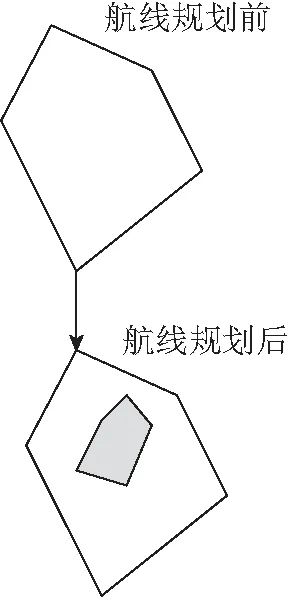
图2 航线规划示意图
(1)首先通过外接矩形包裹多边形[6-7]。设多边形顶点为c1,c2,…,cn,取顶点坐标的最大值最小值为外接矩形的4个顶点坐标(xmin,ymin)、(xmin,ymax)、(xmax,ymax)和(xmax,ymin),再根据最大和最小坐标值,由直线公式求得最线性不规则多边形直线方程,再由飞行高度、航程间隔等参数确定航程。其表达式为
(1)
式中,k为直线斜率;d为直线在y轴的截距。
(2)按照不规则多边形规划航线。
(3)提取农村房屋范围多边形。
(4)采用不规则多边形航迹规划方法,引入共线方程计算航迹延伸距离,从而确定航迹覆盖范围。为了保证测区边界有足够的影像资料,可以根据相机的倾斜角度和测区高差,用下列公式计算线宽。
(2)
式中,L表示扩展距离;F为摄像机倾斜角;H表示测量高度。
(5)根据外扩距离计算零散多边形相关系数[6-9]其计算公式为
(3)
式中,S1、S2为多角形面积;S为合并多边形的面积;S0为无人驾驶飞机倾斜摄影测量区域;β为离散多边形的相关性[8-9]。
(6)航高设计。无人机的倾斜摄影飞行高度是航路设计的基础,航空拍摄的高度需要根据任务要求选择适当的地面分辨率,其表达式为
H=f×DGS/α
(4)
式中,H为航摄高度;f为透镜焦距;α为像元尺寸;DGS为地面分辨率。
3 三维重建
在上述航线规划以及航高确定的基础上,将规划好的航线数据上传到无人机飞控系统中,进行航飞完成影像数据采集。无人机倾斜摄影三维重建技术的目标是从图像信息中计算出三维目标的位置、形状等几何信息,生成三维点云。为了满足测绘的需要,将三维点云置于真实坐标系中是必要的。为此,需要在测量区内设置图像控制点,从而获取实际坐标的图像控制点。基于上述需求,进行三维重建,无人机倾斜摄影技术是基于计算机视觉原理进行三维重建。三维建模步骤如图3所示。
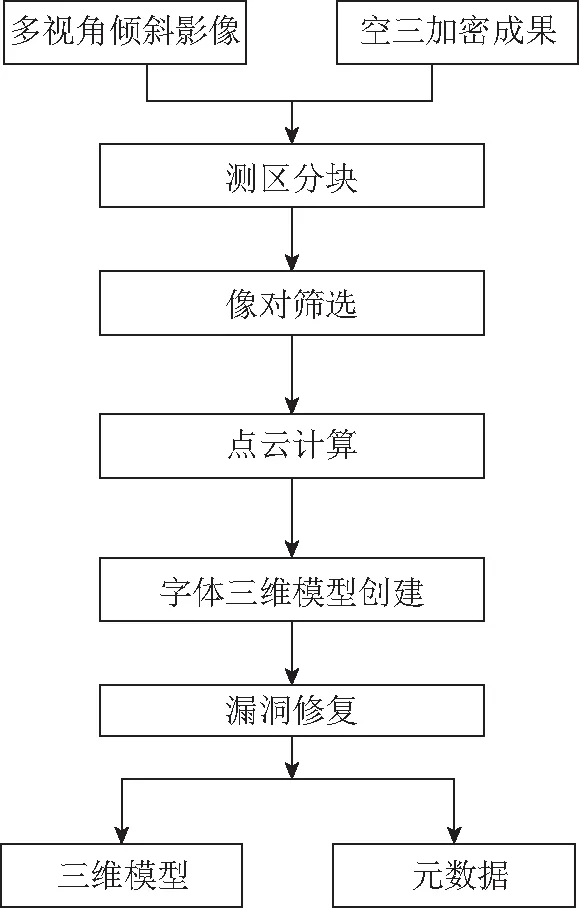
图3 三维建模步骤
利用尺度不变特征变换(scale-invariant feature transform,SIFT)算法,在数据预处理的基础上进行图像特征点匹配。它主要通过连续选择相邻图像中足够连接点的相对方向,计算方向性元素和旋转矩阵来构造自由网络[10]。在此基础上,将图像的波束法和空中三测相结合,得到高精度的修正外方位元素。其表达式为
(5)
式中,C为图像外方位元素系数矩阵;Δ为校正系数;ΔG为控制点坐标校正值;KG为与之对应的系数矩阵;ΔT为连接点坐标校正值;Kτ为与之对应的系数矩阵;L为表征观测值与计算结果的差异值;Ld、LG分别为虚拟观测向量;I为单位矩阵。
利用多视图进行匹配,得到准确的外方位元素,并利用分块多视图匹配产生立体对。主要过程如图4所示。
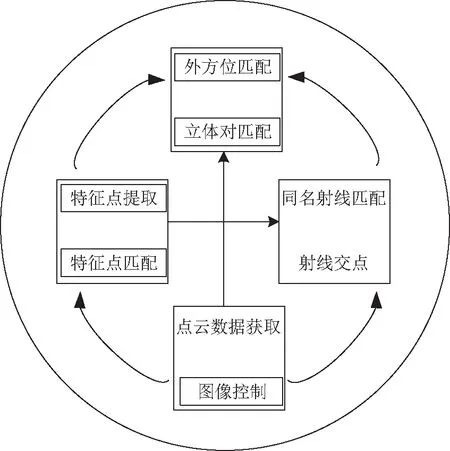
图4 多视图匹配过程
在三维(3D)对立面中,一对同名点得到两个同名的射线,射线的交点是接地点的空间位置。在基于特征点的匹配和提取中,只能得到离散的稀疏空间点,而在图像之间的密集匹配可以得到三维密集的点云数据。以图像控制点为基础,建立了三维点云坐标转换模型,通过坐标转换,得到真实的地理坐标。
在此基础上,采用稠密的三维点云对空间进行三角剖分,对每一个加密曲面三角形完成加密三角剖分,从而得到空间模型。利用纹理映射得到真实的三维模型;采用多角度、多重叠倾斜成像,精确校正和高精度匹配,生成实拍图像。最后,在CASS软件中加载实拍图像,以图像为底图,参照实际三维模型进行屋檐校正和绘制,生成大比例尺数字线图,以此完成农村房屋不动产的确权。
4 实验
本次测试以某测区为试验区,依据上述基于无人机倾斜摄影的农村房屋不动产确权方法,对实验区进行了分析。并为了保证实验的严谨性,将传统的测绘方法与此次研究的测绘方法进行对比,对比文献[1]方法、文献[2]方法以及所提方法的测绘精度与测绘效率。
实验过程中,选择均匀、随机选择试验区域中的明显位置进行试验。采用全球卫星导航系统(global navigation satellite system, GNSS)接收机和全站仪采集屋内或墙内可见角,检测点的精度,测距仪测量屋内边长,真实三维模型检测边长精度,编制精度统计报告。
4.1 测量精度对比
此次研究的基于无人机倾斜摄影技术的农村房屋不动产确权测绘方法与传统方法的测量精度对比结果如图5所示。
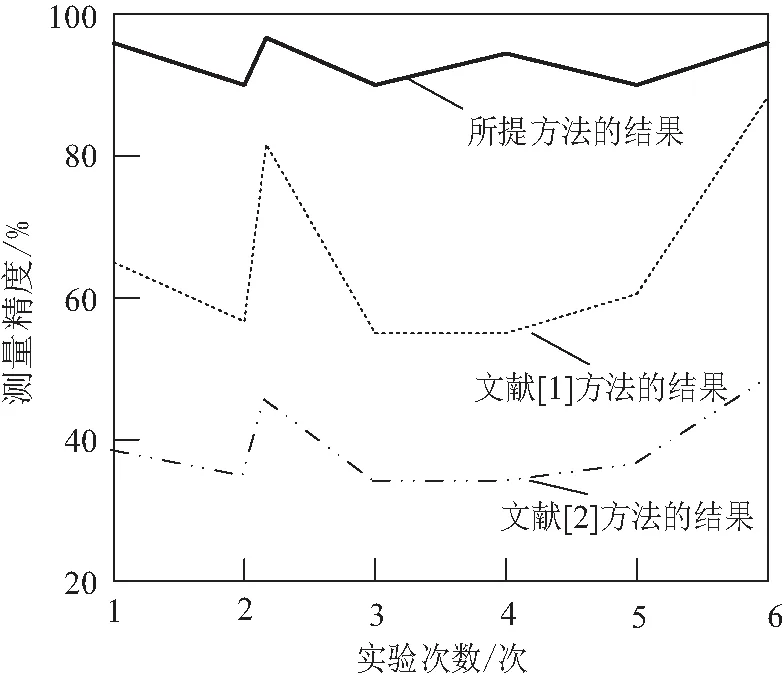
图5 测量精度对比
通过分析图5发现,此次研究的方法在测绘过程中测绘精度较高,测绘误差能够稳定控制在5 cm之内,效果较好。而传统的测量方法,误差较大,因为传统方法在测量中会受到外界因素的影响,并且分辨率不能很好地满足要求,从而降低了测量精度。
4.2 测量效率对比
对比此次研究的基于无人机倾斜摄影技术的农村房屋不动产确权方法与传统方法的测量效率,对比结果如图6所示。
分析图6发现,相较于传统测绘方法,此次研究的测绘方法能够在较短的时间内完成农村房屋不动产确权,较传统方法测绘时间短。
综上所述,此次研究的农村房屋不动产确权方法较传统方法测量精度高,测绘效率高,较传统方法应用效果好。此次研究的测绘方法应用效果好的原因是,此次研究的测绘方法主要运用了无人机倾斜摄影技术,并对其测绘路线以及高度等进行了详细设计,从而提高了测绘效果。
5 结束语
本次研究设计了新的基于无人机倾斜摄影技术的农村房屋不动产确权方法。此次研究的无人驾驶飞机倾斜摄影技术已通过工程实践。且实验结果表明,该三维模型具有较好的精度和效率。但是,在自动建模完成后,由于某些建筑结构的复杂性,会产生一些变形,利用DP-Modeler可以对这些局部缺陷进行细化。但本文的研究方法只重点研究了农村房屋测绘方向,不适用于大规模的城市建设。有些复杂的建筑模型仍然需要人工介入,如何对复杂的建筑细部进行自动化建模是下一步的工作。