遥感影像提取图斑中狭长结构的探测与融解方法
2022-04-02陈文媛艾廷华
孔 博 陈文媛 杨 敏 艾廷华
(武汉大学 资源与环境科学学院, 湖北 武汉 430079)
0 引言
遥感技术具有观测范围广、受地面限制少、数据时效性高等优点,在自然资源调查[1]、灾害监测[2]、军事侦察[3-4]等领域扮演重要角色。随着各类型传感器平台的搭建完善,遥感影像的时空分辨率不断提升,对地表事物的细节表达能力也大幅增强。同时,以深度学习为代表的人工智能技术与遥感影像解译相结合,推动地物目标自动识别取得巨大进步[5-7]。例如,在全国土地资源调查与数据采集建库中,部分地物已经采用深度学习模型进行矢量图斑的自动生成[8]。虽然影像自动解译与目标识别取得重要进展,但是获得的矢量图形数据并不满足数据建库与制图表达的要求。以本文关注的遥感影像提取土地利用图斑数据为例,存在大量的小面积图斑、图斑狭长结构、部分图斑边界呈锯齿状、人工地物正交性特征丢失等诸多问题。这些问题图斑需要通过专门操作进行结构优化,是整个数据采集建库与制图表达体系的重要组成部分。目前,上述工作主要由人机交互方式完成,需要投入较大的人力物力,亟须发展专门的自动探测与处理方法。
狭长结构是指图斑几何形态上窄而长的部分,符号化后出现图形粘连压盖现象,导致难以在图面上清晰地表达出来。因此,依据地图表达比例尺因素需要对狭长结构进行融解处理。在遥感影像提取的地物图斑中,既存在单个图斑整体上呈现狭长形态,也存在图斑的局部结构呈狭长状分布。针对图斑狭长结构的探测与一致性处理问题已经引起相关学者的注意,并提出了相应的算法模型。例如,艾廷华等人[9-10]利用约束德劳奈(Delaunay )三角网提取狭长图斑的骨架结构,结合 空间上的全覆盖、无重叠特点,设计了狭长图斑 的无缝剖分与一致性融解方法。 相关学者[11-13]对 狭长图斑提取的骨架线进行修正,优化狭长图斑区 域的剖分结构与融解结果。 江宝得等人[14]运用Delaunay三角网对图斑局部狭长结构进行分析探测,并建立了专门的一致性剖分策略。
上述图斑狭长结构处理方法主要面向土地利用图斑数据的综合任务[15],如对1∶1万图斑数据在1∶5万比例尺下呈现的狭长结构进行处理。由于产生的缘由、呈现的类型、处理的原则等方面存在差异,它们难以完全解决遥感影像提取图斑并实施建库过程中出现的狭长结构。因此,需要在现有研究基础上进一步丰富对图斑狭长结构的处理方法。本文首先深入分析遥感影像提取地物图斑产生狭长结构的缘由;在此基础上,提出两种针对不同情形的图斑狭长结构探测与一致性融解方法,并通过实验对提出的方法进行了分析与验证。
1 图斑狭长结构产生缘由分析
在遥感影像提取地物图斑并实施数据建库过程中,存在多种因素可能导致狭长结构的出现。首先,图斑表达的地物本身具有狭长形态特点。受自然及人文环境影响,部分地物如零散分布的草地和耕地、道路旁边及建筑物中间地带分布的林地、局部的裸地等,本身在整体或局部结构上可能呈现狭长状分布,提取获得的图斑在宽度上不满足建库比例尺表达下的最小可视距离条件。图1展示了部分图斑狭长结构的典型实例。其中,图1(a)中的图斑A和B整体上呈狭长状,图1(b)显示了耕地区域的图斑提取结果,由于农田间部分田埂、沟渠分布细长,并且相互间纹理反差较小,从而产生大量含局部狭长结构的图斑(如图斑C)。

(a)图斑整体呈狭长状
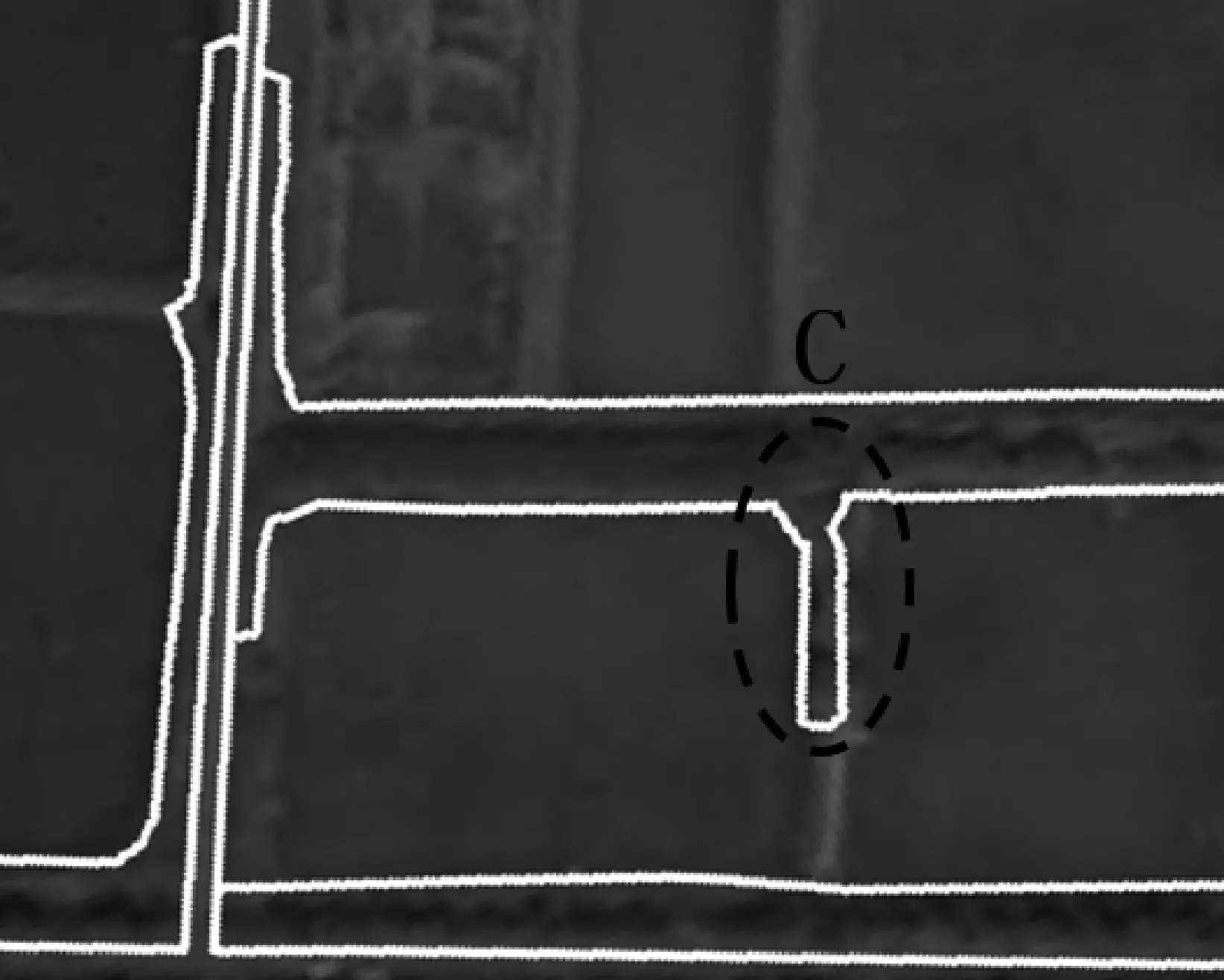
(b)图斑局部呈狭长状图1 地物分布上的形态特点产生的狭长结构示例
其次,不同类型地物的图斑提取后,进行叠加集成时产生狭长结构。由于不同类型地物的成像特点不同,需要采用不同的模型和参数从遥感影像上依次进行识别提取。在数据建库阶段,将提取的不同类型地物图斑进行叠加集成时,相邻图斑间的共享边界往往存在位置不一致现象,从而产生大量的细长状“碎片”图斑。如图2所示,河流、道路等地物的图斑边界与相邻其他类型地物的图斑边界叠置后,出现了图斑A、B、C、D等大量的细长形态图斑。
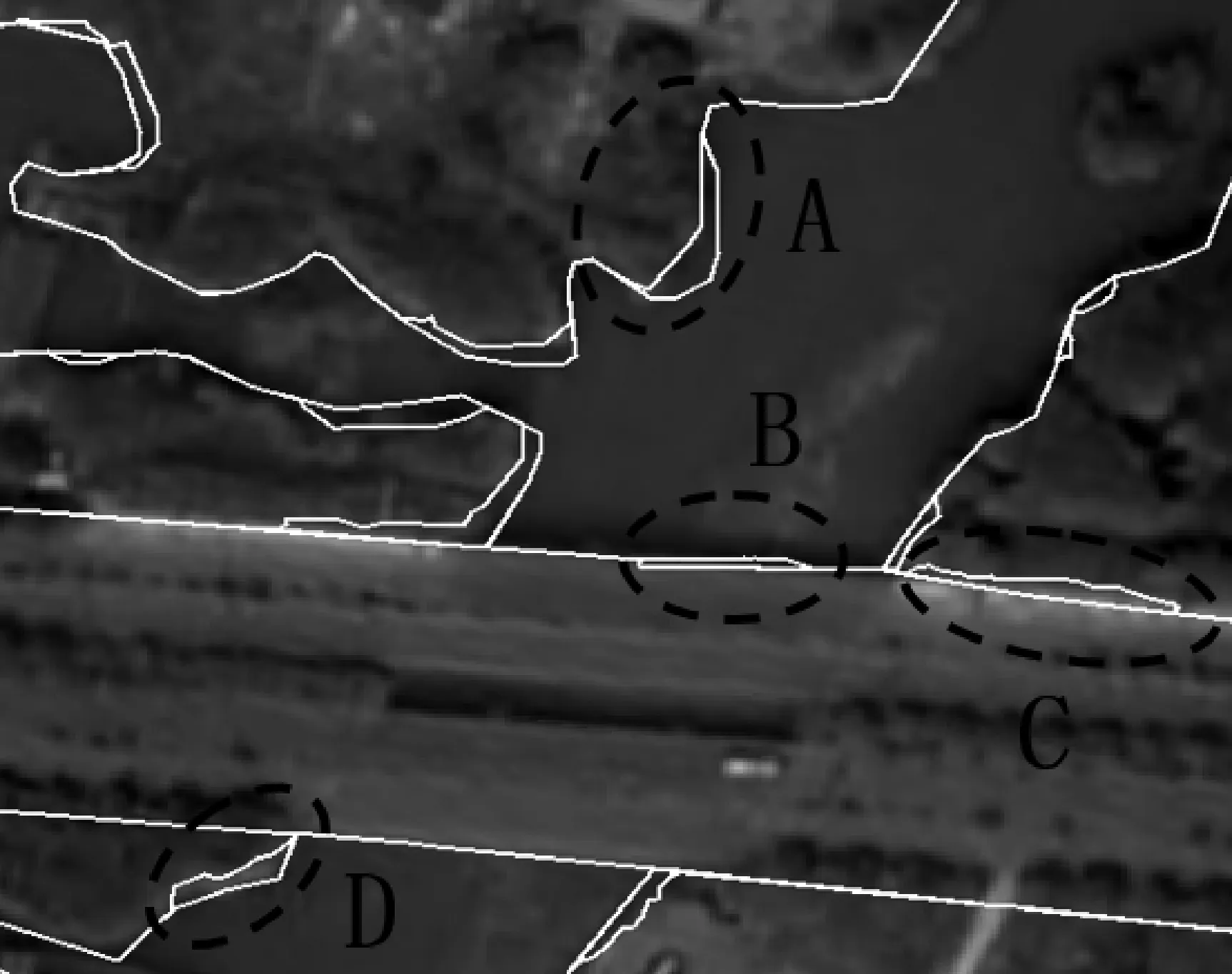
图2 不同类型地物图斑叠加集成中产生的狭长结构
除上述原因之外,遥感影像的图像质量状况、地物的纹理特点、地物识别与目标提取算法的性能等,均可能导致图斑狭长结构的出现。与小面积图斑等其他问题图斑相比较,具有狭长结构的图斑在形态上更为多样,与周边邻近图斑间的拓扑关系也更加复杂,导致探测与融解处理的难度系数更高。
2 图斑狭长结构的自动探测与一致性融解方法
在深入分析图斑狭长结构产生的缘由与特点基础上,本文围绕两种不同情形设计了专门的探测与一致性融解算法,从而丰富现有的图斑狭长结构处理方法,满足基于遥感影像的地物图斑数据生成与建库需求。
2.1 控制图层网格边界产生的狭长结构探测与一致性融解
在地物图斑数据采集与建库过程中,水系、道路要素起到骨架控制作用。现有技术条件下,利用相关模型从遥感影像提取得到水系、道路图斑后由人工进行核检修正,并以此为控制图层对制图区域形成网格剖分。进一步地,将控制图层与提取得到的其他类型地物图斑进行叠加时,网格边界附近区域会产生大量细长的“碎片”图斑,并且分布上与网格边界近似平行。基于这一特点,本研究提出一种基于缓冲区分析的图斑狭长结构探测与一致性融解方法。
如图3(a)所示(黑色线符号表示控制图层包含的水系道路图斑边界,白色线符号表示其他类型地物的图斑边界),以这些边界线为中心向外侧做宽度为w的缓冲区如图3(b)所示,并与周围其他类型地物的图斑进行相交分析。在此基础上,探测以下三种不同类型的狭长结构,如图3(c)所示,并实施相应处理。
(a)待处理的图斑数据
(b)控制图层网格边界构建缓冲区

(c)图斑狭长结构的识别与分割

(d)图斑狭长结构的融解处理图3 基于缓冲区分析的控制图层网格边界图斑狭长结构探测与一致性融解方法
Ⅰ类。图斑整体处于缓冲区范围内,并且仅与一个非控制图层的图斑拓扑相邻。对于该类型狭长图斑,直接与相邻的非控制图层的图斑进行合并。
Ⅱ类。图斑整体处于缓冲区范围内,但是与多个非控制图层的图斑拓扑相邻。对于该类型狭长图斑,首先需要进行剖分处理,然后依次合并至相邻的非控制图层的图斑。如图3(c)中的狭长图斑A,在拓扑交点a、b处做缓冲区中心线的垂线,依据垂线对图斑A进行分割处理,得到的剖分区域依次合并至相邻的图斑B、C、D。
Ⅲ类。图斑的部分结构处于缓冲区范围内。如图3(c)中的图斑E,首先在缓冲区边界与该图斑的交点c处做与缓冲区中心线的垂线,依据垂线对图斑进行分割,然后将图斑E处于缓冲区范围内的部分合并至相邻的图斑D。
按照上述步骤对每个剖分网格进行处理,即可完成网格边界附近图斑狭长结构的探测与一致性融解处理。其中,缓冲区宽度w由表达比例尺下的图面最小可视距离决定。
2.2 顾及正交性的局部狭长结构探测与一致性融解
对于非控制图层网格边界区域分布的图斑狭长结构,可采用现有如基于Delaunay三角网的探测与融解方法[10]进行处理。然而,这些方法应用于农田、养殖水面、沟渠、建筑物等地物图斑时,缺乏对人工地物正交性特征的考虑。因此,本文设计了一种顾及正交性的局部狭长结构探测与一致性处理方法。首先,对图斑边界进行预处理,包括冗余节点剔除与节点加密。其中,采用道格拉斯-普克算法进行冗余点的去除,压缩矢高设置为0.01 m。进一步地,通过线性内插方法对压缩后的图斑边界线进行加密。依次分析相邻两个节点pi(xi,yi)、pi+1(xi+1,yi+1)间的距离,若|pipi+1|大于阈值s时(s取值等于最小可视距离),则在pi、pi+1间进行节点内插。假设需要内插的节点数为n,且s×n≤|pipi+1|且s×(n+1)>|pipi+1|,则第k(1≤k≤n)个内插节点坐标计算为
(1)
式中,pi和pi+1为边界两相邻点;xi、xi+1、yi和yi+1分别为两点的横纵坐标;|pipi+1|表示pi和pi+1之间的距离;xk和yk表示第k个内插点的横纵坐标;n为需要内插的节点数;s为最小可视距离。
图斑边界线预处理后,运用Delaunay三角网进行局部狭长结构的探测与融解处理。如图4所示,具体步骤如下:
(1)提取图斑边界节点构建Delaunay三角网,仅考虑图斑内部的三角形。
(2)遍历每个三角形,计算连接非相邻节点三角形边的平均长度Lmean;若Lmean>λ,则删除该三角形。
(3)按照拓扑关系对保留的三角形进行组合,进而得到图斑的狭长结构,并对狭长部分切割边进行调整,使得切口部分保持正交性特点。以图4(d)中的切割边ac为例,对它相邻的两条直线段进行延长直至相较于点b,以ab替换ac作为最终的切割线。
(4)依据调整后的切割线分解图斑的狭长结构,按照共享边界最长原则,将探测得到的狭长结构合并至相邻的图斑中。
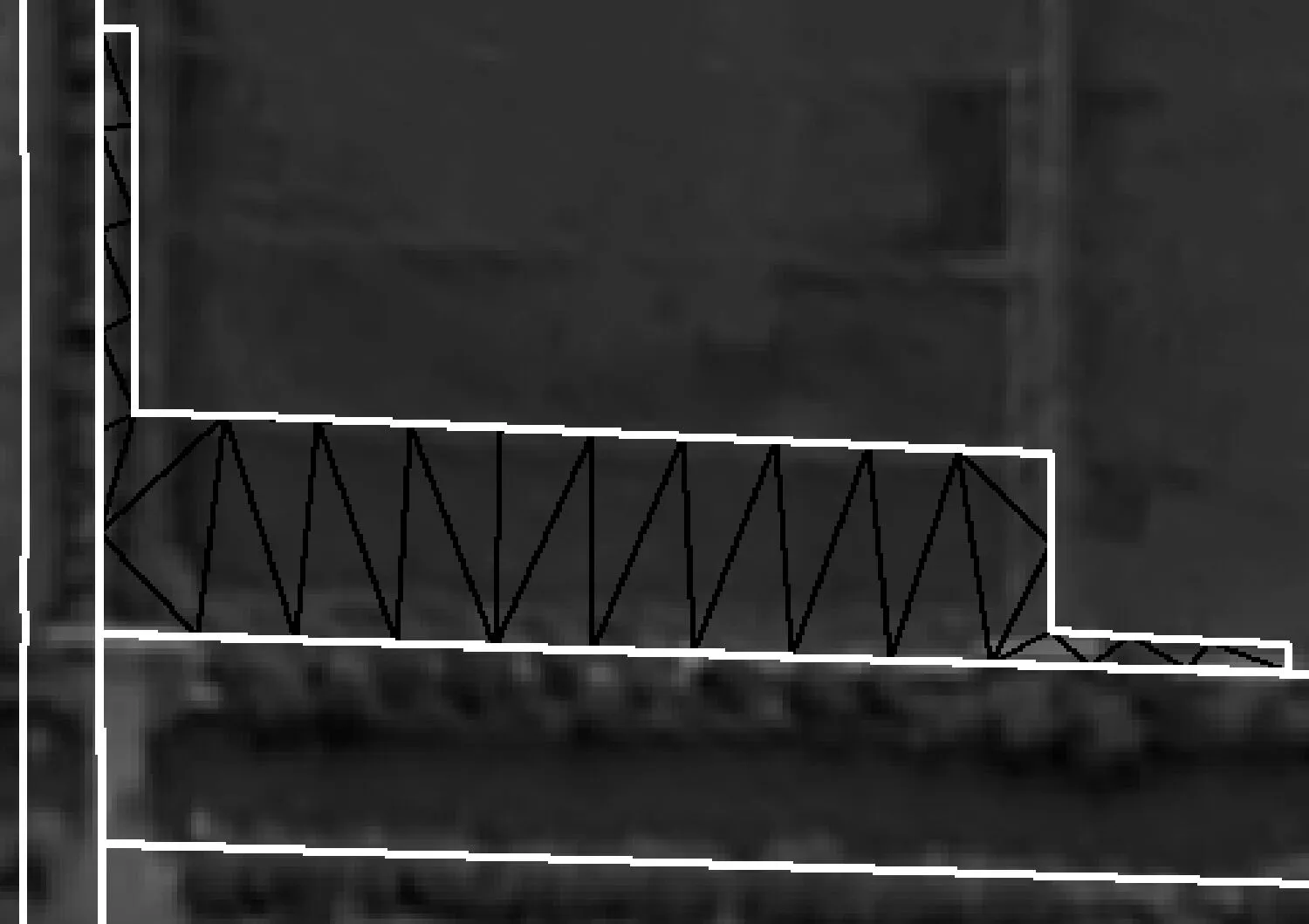
(a)构建Delaunay三角网
(b)删除长边三角形

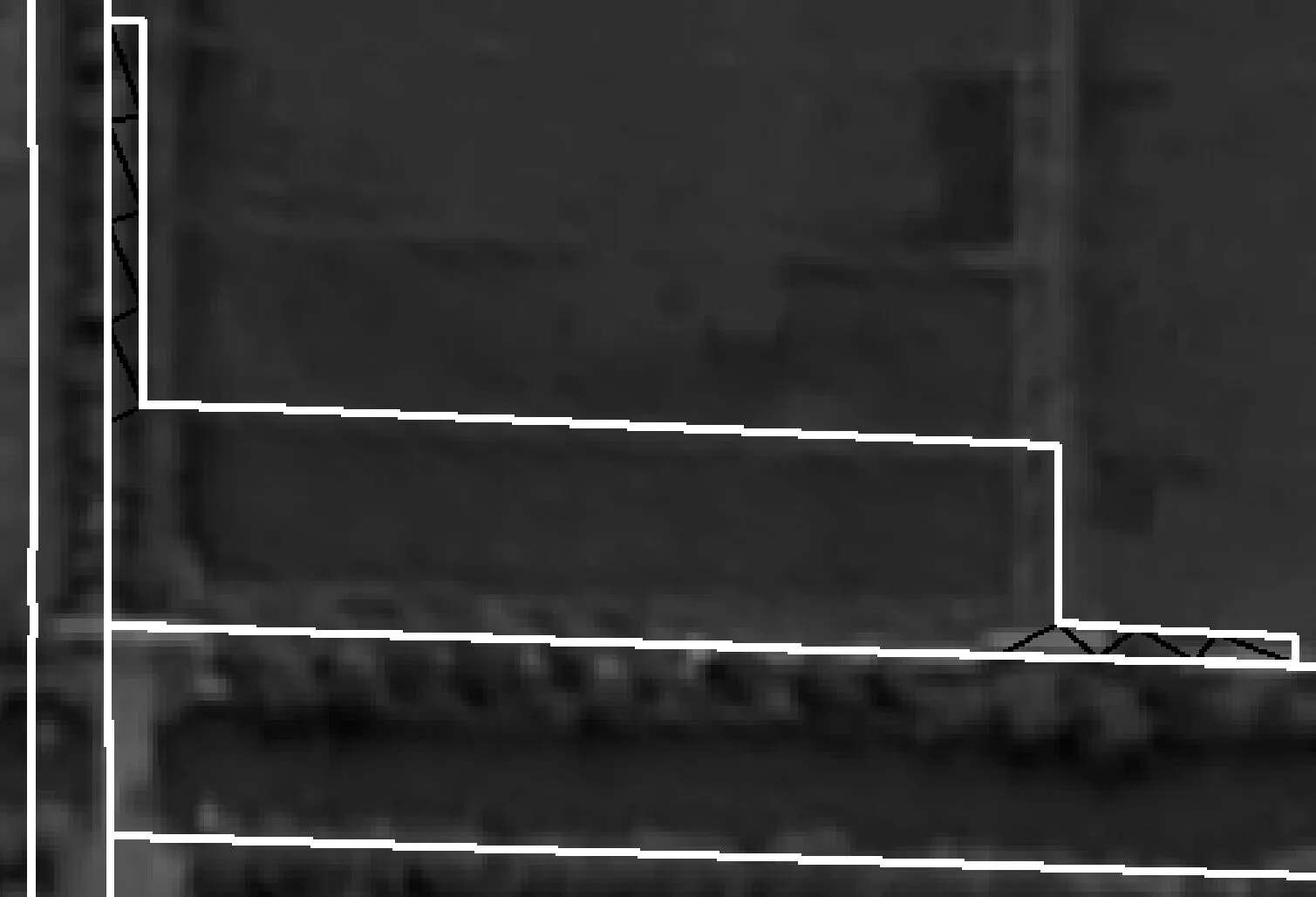
(d)狭长结构切口正交性调整

(e)图斑狭长结构分解
(f)狭长结构融解处理
3 实验分析
实验区域面积约2 km2,分布有道路、水系、建筑物、林地、农田、沟渠等地物。其中,道路、水系图斑(黑色边界表示)通过模型自动提取后由人工实施了核检改正,形成控制图层;然后与建筑物、林地、农田、沟渠等其他类型地物的图斑(白色边界表示)进行叠加,总共形成241个图斑。试验过程主要对提出的两种图斑狭长结构探测与一致性融解算法进行分析验证。其中,参照1∶1万土地利用数据建库规范以及实际应用需求,在控制图层网格边界图斑狭长结构探测中缓冲区边界设置为3 m,局部狭长结构探测算法中三角形边平均长度阈值λ设置为5 m。
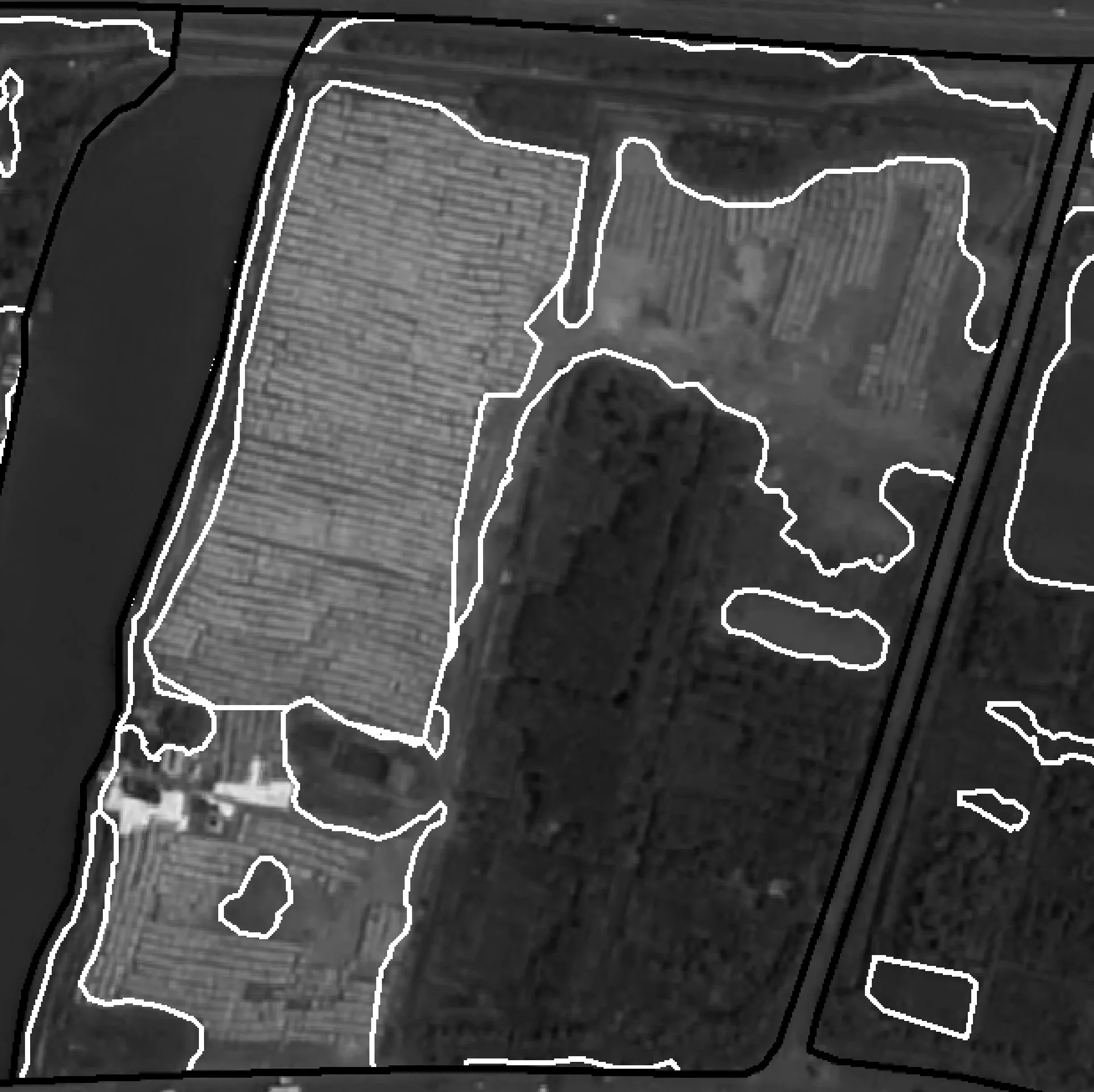
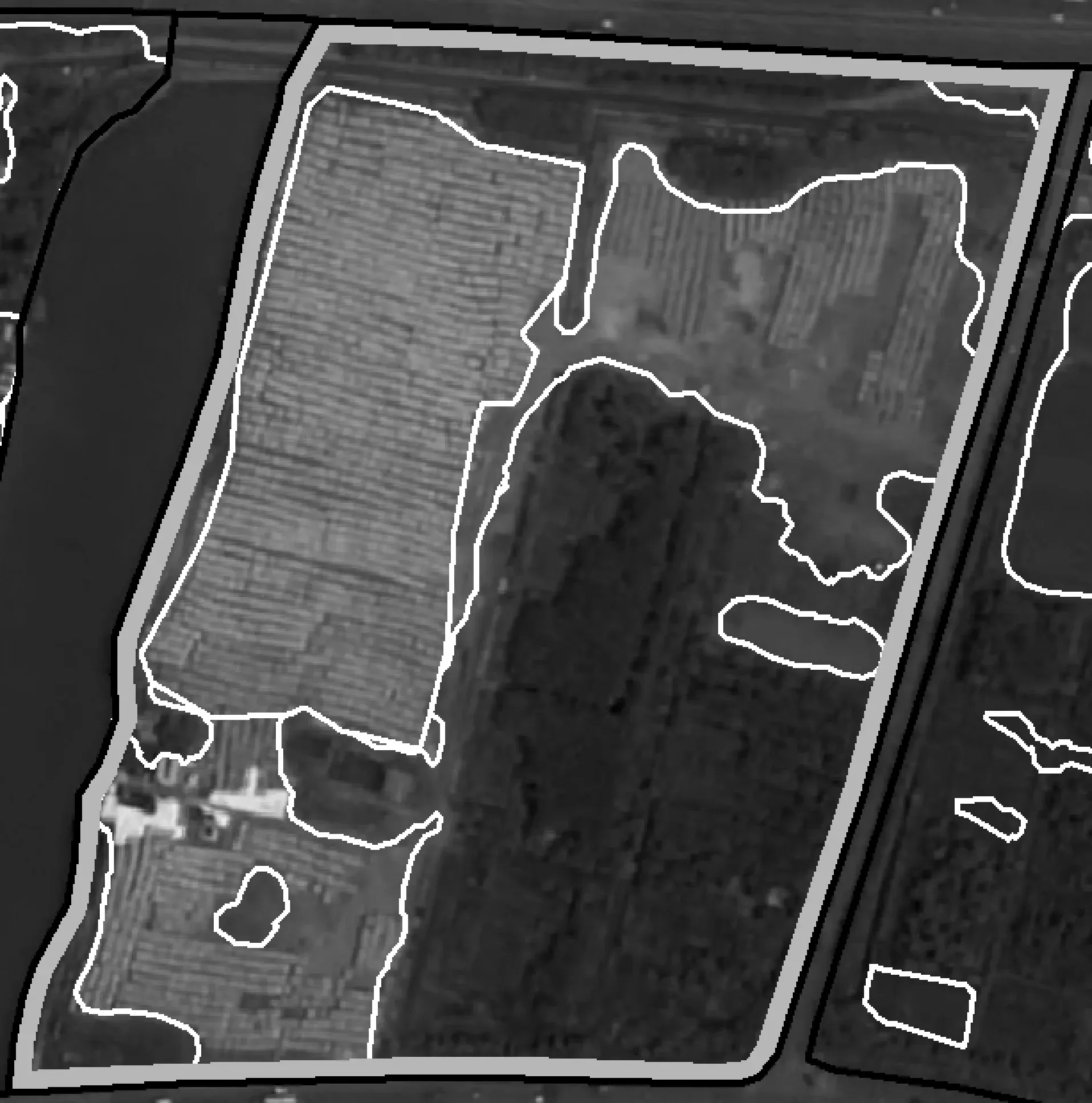
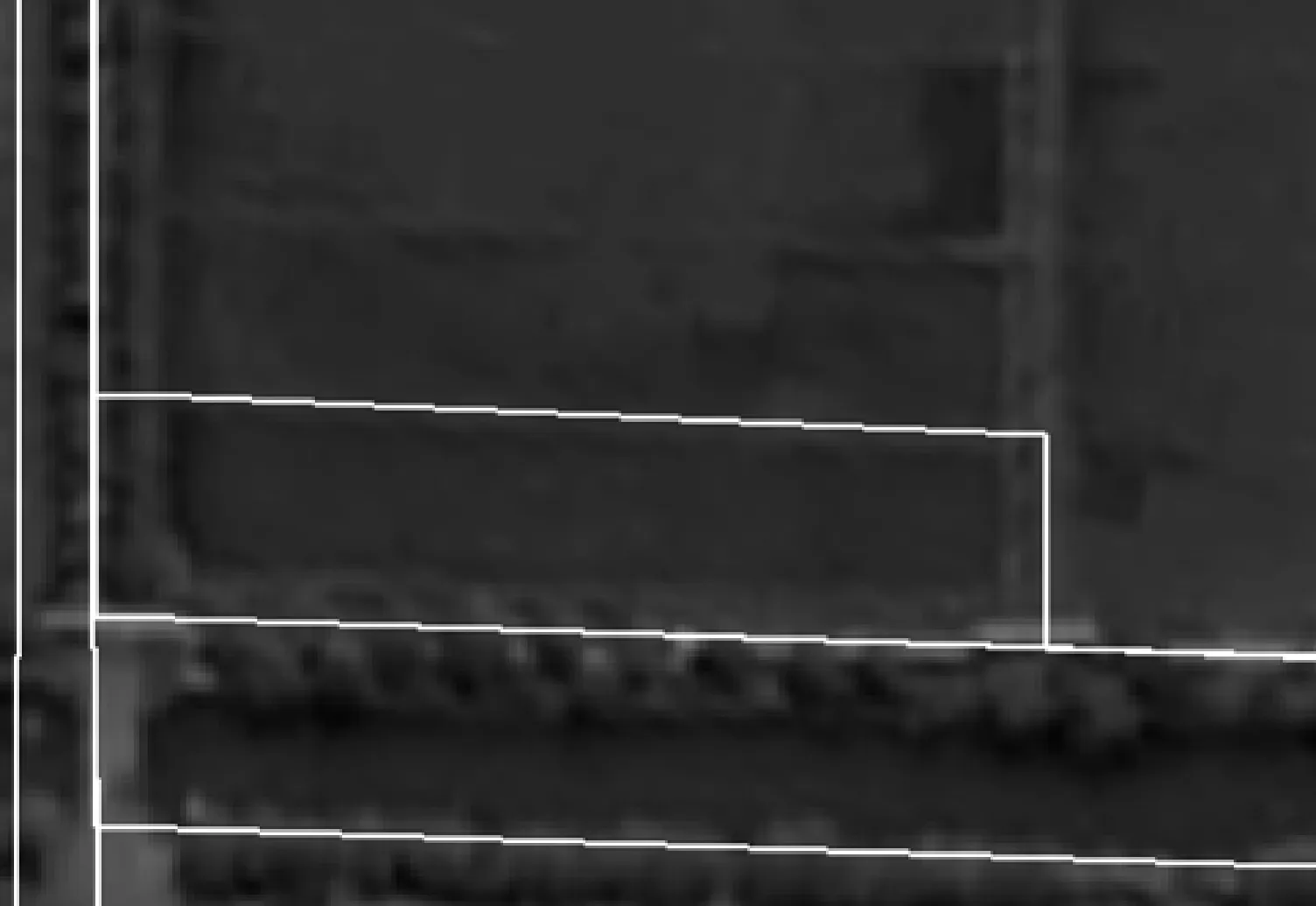
图5展示了两种不同情形图斑狭长结构处理前后的变化示例(黑色线符号表示控制图层包含的水系道路图斑边界,白色线符号表示其他类型地物的图斑边界)。表1列出了本文两种方法对不同类型图斑狭长结构的探测与一致性融解结果的统计信息。其中,控制图层网格边界附近区域共存有89个图斑存在狭长结构,采用基于缓冲区分析的探测方法准确识别87个图斑,经人工检查核实83个图斑的狭长结构得到合理的融解处理,探测与一致性融解的准确率分别为97.8%和95.4%;共有23个农田、沟渠、养殖水面图斑存在狭长结构,22个图斑通过本文方法得到准确识别,在满足正交性特征保持的条件下20个图斑的狭长结构得到合理的融解处理,探测与一致性融解的准确率分别为95.7%和90.9%。以上结果表明,本文提出的两种方法能够对遥感影像提取图斑中存在的狭长结构进行准确探测,并实施合理的一致性融解处理。

图5 本文方法对图斑狭长结构实施探测与一致性融解的结果示例
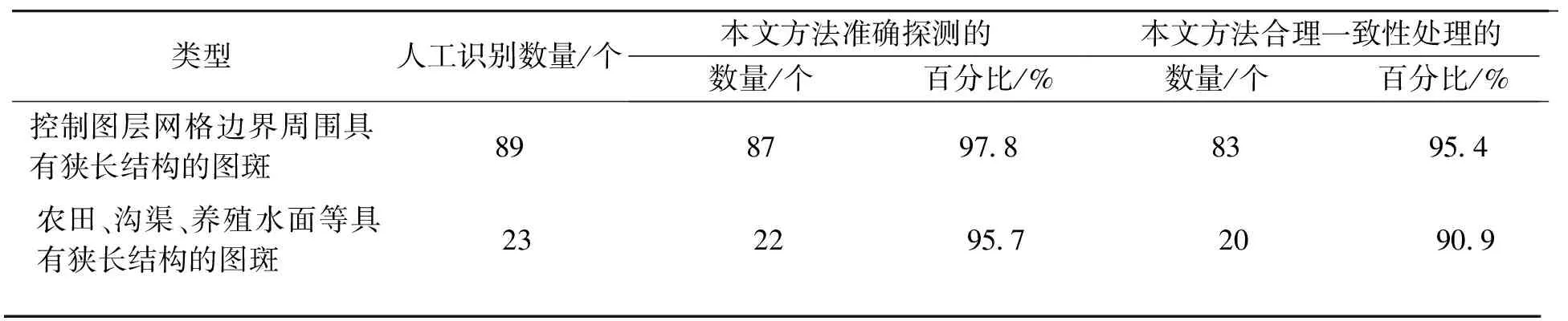
表1 本文方法对图斑狭长结构探测与一致性融解处理的准确度
4 结束语
基于遥感影像的地物图斑自动识别与建库已经成为当前测绘地理信息领域关注的热点课题。该过程的实现不仅需要引入人工智能技术发展影像智能解译与目标自动识别技术,而且需要建立高效的图斑结构优化后处理方法。本文针对遥感影像提取图斑中存在的狭长结构探处理问题开展专门研究。在深入分析狭长结构产生的缘由及表现形式基础上,针对控制图层网格边界附近分布的图斑狭长结构以及人工地物图斑的局部狭长结构设计了专门的探测与一致性融解方法。利用真实数据进行试验验证,结果表明本文方法在狭长特征的探测与融解处理方面均具有较高的准确率。下一步工作中,需要将本文提出的方法与现有其他方法进行有效集成,建立图斑狭长结构类型的自适应诊断与一致性融解处理技术链条,从而实现对整个数据集的批量式处理。
